TI杯大学生竞赛:小车跟随系统挑战与性能优化
32 浏览量
更新于2024-08-03
2
收藏 446KB PDF 举报
小车跟随行驶系统是2022年TI杯XX省大学生电子设计竞赛中的C题,该任务要求参赛者设计一套具备循迹功能的双车系统,由领头小车和跟随小车组成。系统的核心技术包括路径追踪、速度控制和车辆间协同。以下是关键知识点的详细解析:
1. 硬件平台:参赛者需使用TI公司的MCU作为核心控制器,这可能意味着需要掌握MCU的编程接口和控制算法,比如使用Cortex-M系列或TI的特定开发工具。
2. 循迹功能:小车需要具备在指定路径上行驶的能力,这涉及到视觉传感器(如红外、激光或摄像头)的使用,用于识别路径并进行实时定位。参赛者需要编写算法处理传感器数据,实现路径跟踪和避障。
3. 速度控制:系统要求小车速度范围在0.3到1米/秒,这就需要精确的电机驱动和PID控制算法来确保速度稳定,并满足误差不超过10%的要求。
4. 路径选择与指示:系统支持两种路径行驶——内圈ABFDE和外圈ABCDE,以及在E点附近的“等停”指示,小车需能够根据指示调整行驶策略。
5. 车辆协同:在不同的行驶阶段,跟随小车需要精确地跟随领头小车,保持20厘米的间距,包括在超车和反超过程中。这需要高级的车辆控制算法和实时通信技术。
6. 碰撞检测与避免:在整个过程中,小车必须避免碰撞,这可能通过红外传感器或者超声波传感器来实现,同时结合运动预测算法,确保安全距离。
7. 声光提示:当完成行驶任务时,领头小车和跟随小车都需要发出声音提示,这涉及到音频信号处理和执行器控制。
8. 性能评估:系统在三个不同的场景下接受测试,分别对速度控制精度、车辆协同、路径适应性等进行评估,总分为70分。
本题不仅考验参赛者的硬件操控能力,还对软件算法、路径规划、实时数据处理和系统集成等多方面技能提出了较高要求,是一项综合性的电子设计挑战。
C 题 - 1 / 4
2022 年 TI 杯 XX 省大学生电子设计竞赛
小车跟随行驶系统(C 题)
一、任务
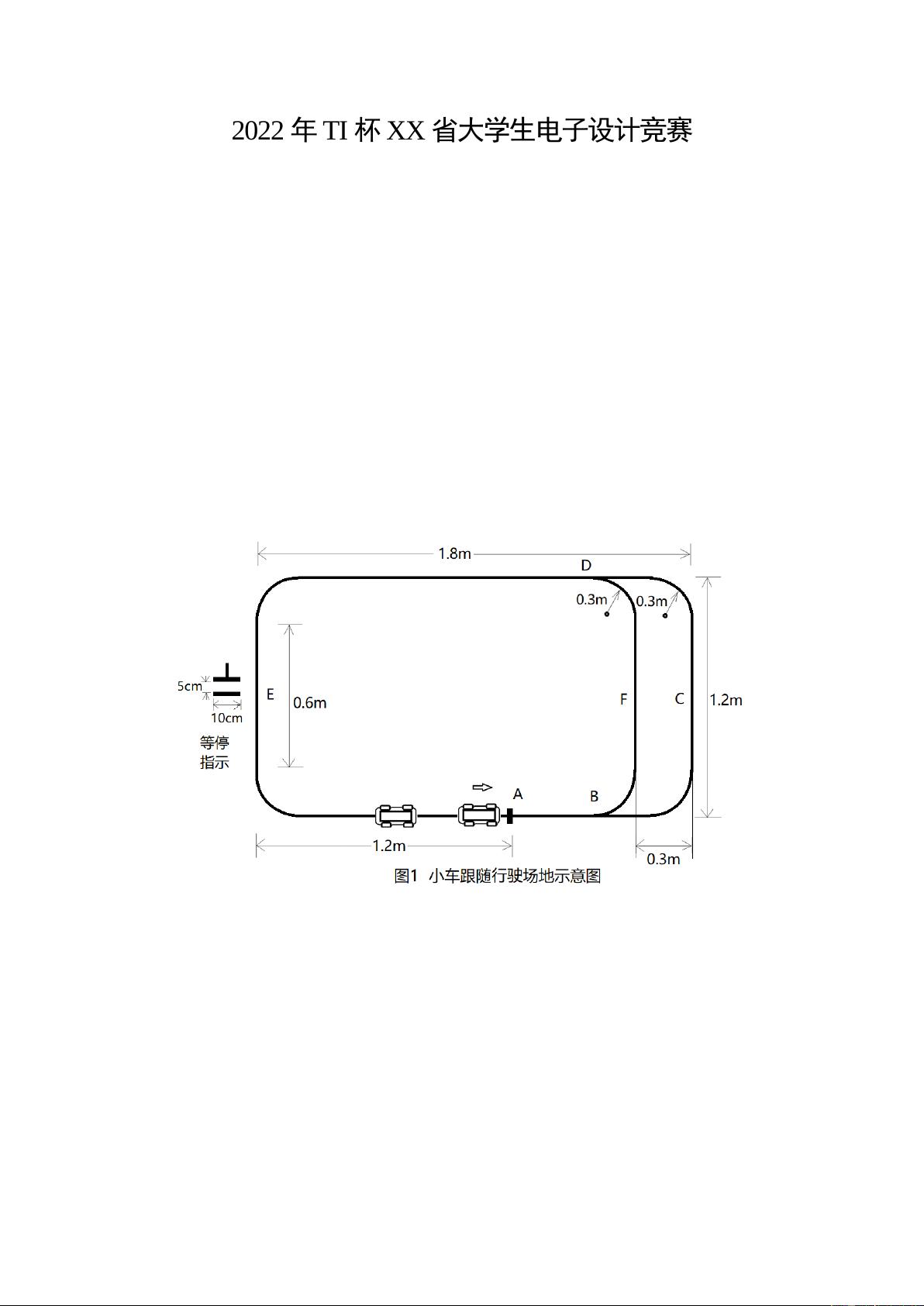
设计一套小车跟随行驶系统,采用 TI 的 MCU,由一辆领头小车和一辆跟随
小车组成,要求小车具有循迹功能,且速度在 0.3 ~ 1m/s 可调,能在指定路径上
完成行驶操作,行驶场地的路径如图 1 所示。其中,路径上的 A 点为领头小车
每次行驶的起始点和终点。当小车完成一次行驶到达终点,领头小车和跟随小车
要发出声音提示。领头小车和跟随小车既可以沿着 ABFDE 圆角矩形( 简称为
内圈 )路径行驶,也可以沿着 ABCDE 的圆角矩形( 简称为外圈 )路径行驶。
当行驶在内圈 BFD 段时,小车要发出灯光指示。此外,在测试过程中,可以在
路径上 E 点所在边的直线区域,由测试专家指定位置放上“等停指示”标识(见图
1 左侧),指示领头小车在此处须停车,等待 5 秒后再继续行驶。
二、要求
1. 将领头小车放在路径的起始位置 A 点,跟随小车放在其后 20cm 处,设
定领头小车速度为 0.3m/s,沿着外圈路径行驶一圈停止,要求:(20 分)
(1) 领头小车的平均速度误差不大于 10%;
(2) 跟随小车能跟随领头小车行驶,全程不能发生小车碰撞;
(3) 完成一圈行驶后领头小车到达 A 点处停车,跟随小车应及时停止,停止
时间差不超过 1s,且与领头小车的间距为 20cm,误差不大于 6cm。
下载后可阅读完整内容,剩余3页未读,立即下载
2024-01-14 上传
2024-01-14 上传
2024-01-15 上传
2023-05-12 上传
2024-01-24 上传
2023-10-27 上传
2024-07-13 上传
2023-10-23 上传

CV视界
- 粉丝: 2w+
- 资源: 525
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
