CANopen协议详解:发展历程、模型与应用
需积分: 9 82 浏览量
更新于2024-07-19
1
收藏 1.77MB PPT 举报
CANopen协议是一种专为工业自动化设计的通信标准,由CiA(CAN in Automation)组织制定和发展自Philips医疗系统的CAL协议。该协议起源于1994年,经历了多个版本的迭代,如V1.0、V1.1、V2.0至V4.1,不断优化以适应更广泛的应用场景。
CANopen的基础包括以下几个关键部分:
1. **CANopen网络通信模型**:CANopen建立在CAN(Controller Area Network)总线技术之上,它构建了一种层次化的通信模型,支持设备之间的可靠通信和网络管理。网络模型的核心是对象字典(Object Dictionary, OD),其中定义了设备的功能模块和数据对象。
2. **CANopen通信协议**:CANopen协议不仅继承了CAL的某些服务,如配置管理和网络管理系统(CMS)、节点管理(NMT)、诊断(DBT)以及逻辑链路管理(LMT),还引入了自己的特色,如预定义的通信对象标识符(COB-ID)和设备模型。
3. **CANopen设备规范**:CANopen设备根据功能和角色分为不同类型的设备,如主站(Master)、从站(Slave)或智能设备(PDO发送/接收设备)。每个设备都有自己的节点标识符(NODE-ID),用于唯一标识网络中的节点,且在同一网络中不允许重复。
4. **标识符说明**:CANopen中的重要标识符包括节点ID和COB-ID。节点ID是一个7位数字,范围从1到127,用于设备间的区分;COB-ID则是11位,由功能代码和节点ID组合而成,用于数据帧和远程帧的传输。
通过CANopen协议,工业设备能够实现高效、灵活的通信,支持设备间的协作和数据共享,广泛应用于自动化生产线、楼宇控制系统、车辆电子系统等领域。学习CANopen协议有助于理解和设计工业设备的网络架构,提升系统的集成性和可靠性。
21/8/8
10/54
www.hust.e
du.cn
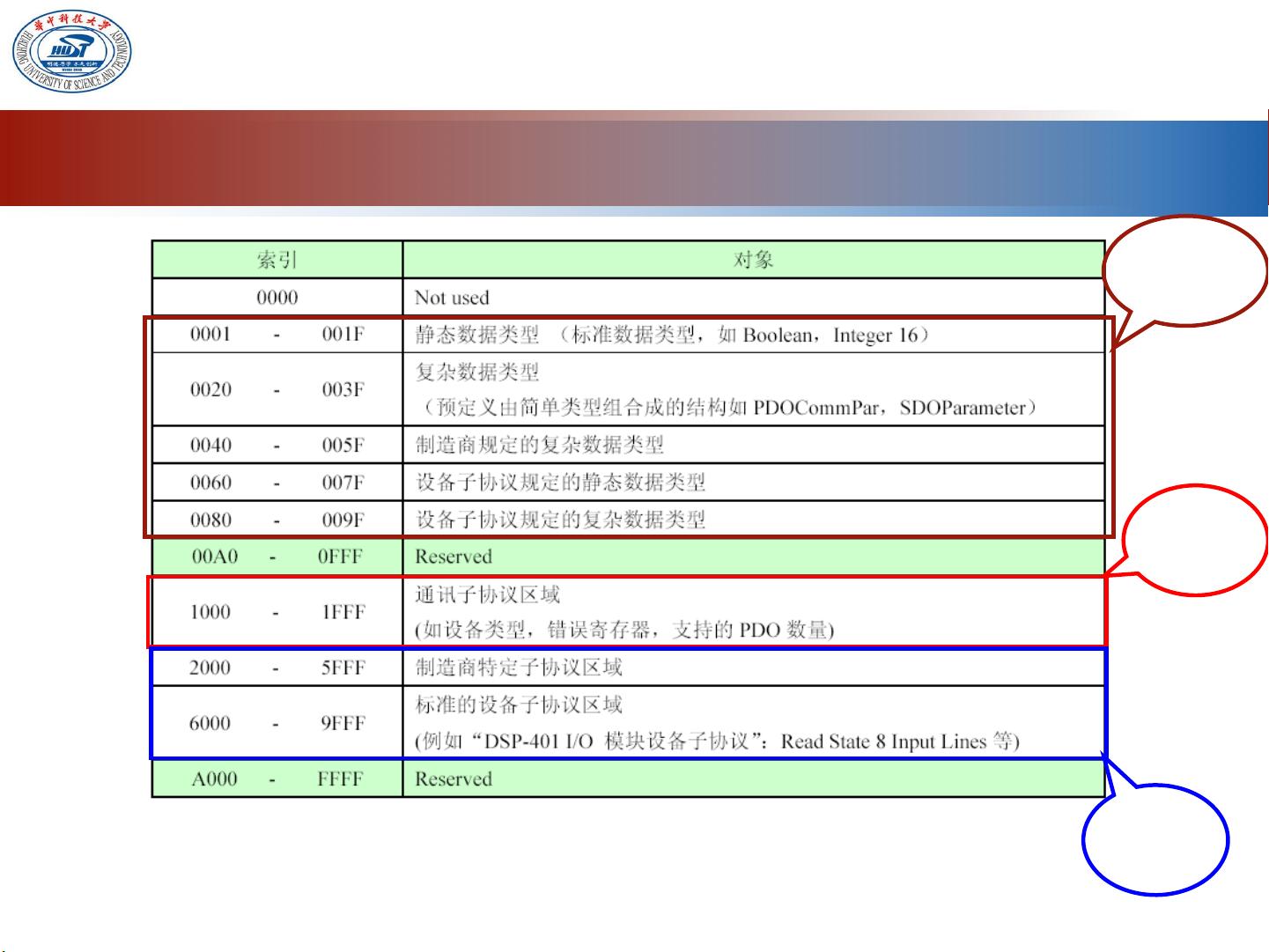
1.6.1 对象词典的总体布局
数据
类型
通信
规范
设备
规范
剩余53页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-03-22 上传
2018-04-07 上传
2018-11-17 上传
2011-10-13 上传
2021-10-03 上传
2022-09-21 上传

zxx1852004
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- Linux系统指令大全.pdf
- 深入浅出Struts2.pdf
- Pro Ado.net Data Services
- vim中文用户手册 学习vi
- 基于单片机的智能台灯设计与制作
- Serial Port Complete 2nd 英文版 PDF
- fedora中文版安装及配置常见问题解答
- fedora 10安装指南
- ARM Manual (ARM英文操作手册)2
- The Verilog Hardware Description Language 5th Edition
- vb图书管理系统论文
- more effective C++
- Struts in Action 中文版
- MFC程序中类之间变量的互相访问
- 带串行口通信汉字点阵屏的研究与实现
- 先进算法讲义——中科大
