KUKA机器人选型与集成指南:功能与应用详解
需积分: 5 142 浏览量
更新于2024-06-30
收藏 28.32MB PDF 举报
KUKA College提供的"机器人选型和集成"文档详细介绍了KUKA机器人系列及其在工业自动化中的应用。该文档主要针对机器人工作单元规划员和设计员用户群,旨在帮助他们理解如何根据具体需求选择和集成适合的KUKA机器人。以下是一些关键知识点:
1. **KUKA机器人概述**:
KUKA是德国领先的机器人制造商,以其精密和高效的工业机器人而闻名。文档追溯了KUKA公司的历史,从罗素姆(R.U.R.)万能机器人概念到现代KUKA产品的演变。
2. **工业机器人介绍**:
- **定义和结构**:工业机器人通常具备多个关节,用于执行精确的重复任务,包括主轴的布局,如直角、线性或球面运动。
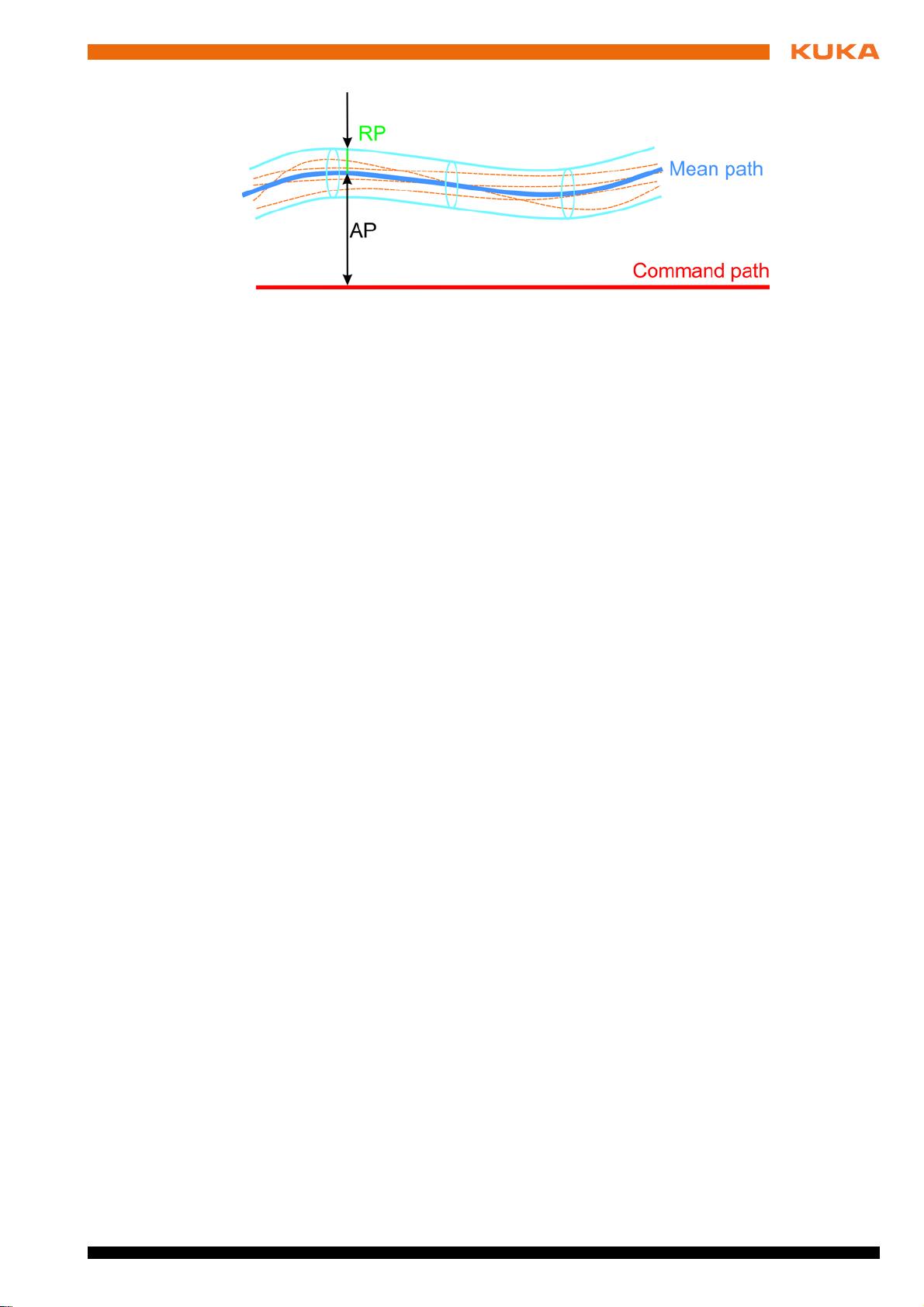
- **精度标准**:包括绝对精度(机器人的初始设定精度)和重复精度(连续运行的稳定性),这些因素对于选择机器人至关重要。
- **定位精度和轨迹精度**:强调了机器人在空间定位和路径规划方面的技术特点。
3. **机器人系统组件**:
- **工作单元组件**:涵盖了机器人本体、末端执行器、控制柜、安全设备以及外围设备等组成部分。
- **机器人选型**:根据实际需求进行细致分析,包括负载能力(如重量和力矩)、操作环境(如温度、湿度、清洁度)、以及工作范围等因素。
4. **选型策略**:
- **负载考虑**:选择机器人时,要考虑其承载能力和负载类型,确保能适应预期的作业任务。
- **操作条件**:考虑工作环境的限制,如工作空间、高度、振动、电磁干扰等,这些都会影响机器人的性能和使用寿命。
5. **版权和责任声明**:
文档指出,复制或向第三方分享必须得到KUKA RobotergmbH的明确许可,并且强调了内容可能存在更新或与实物不符的风险,但KUKA会定期进行校对和更新以保持准确性。
KUKA College的这份资料提供了深入的指导,帮助用户了解KUKA机器人产品线,选择合适的机器人解决方案,并确保它们在实际应用中的有效集成和优化。这对于任何从事机器人技术和集成的工程师来说,都是一个宝贵的参考资料。
16 / 315 发布日期 :16.11.2016 版本 :RCD Roboterauswahl und Integration V5
机器人的选择和集成
2.4 定位精确的机器人
“ 定位精确的机器人 ” 功能所基于的物理数学模型考虑到了因公差和齿轮弹
性引起的校准时轴距和轴的倾斜的偏差。由此可在绝对接近各个点时达到较高
精度。
理想机器人 原则上,机器人和工作单元的位置和几何尺寸被保存在模拟系统中。利用这些
信息可以离线创建生产程序。根据给定的轴坐标进行的工具顶尖 (TCP) 计算
是一项理想化的计算,因为没有考虑到下列实际效应。
真实机器人 理想机器人的故障源
工件公差:工件实际长度
轴倾斜:机器人成员的实际几何布置
倾斜
零点标定错误:关节角度误差
齿轮弹性
平衡配重
只有在计算笛卡尔位置时将上述效应全部考虑在内时,才能提高精确度。此处
仅涉及提高静态精确度。在这里将不考虑影响定位精度的所有动态效应。
图 2-5: 理想机器人 - 真实机器人

剩余314页未读,继续阅读
3150 浏览量
162 浏览量
227 浏览量
223 浏览量
2021-11-17 上传
491 浏览量

小四黑
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- BEM_github
- 生成艺术:越来越多的生成艺术项目集合
- fishcorecpe
- Turmoil
- 高斯白噪声matlab代码-project-finals:我的电子与通信工程学士学位的最终项目
- CentOS-7-x86_64-DVD-1503-01.zip
- 6DOF-case-of-sphere-falling.rar_fluent falling_fluent小球入水_入水模拟 F
- C/C++:符串排序.rar(含完整注释)
- allofplos:allofplos项目的存储库
- Tuesday
- DRIVE datasets.zip
- Sololearn_practice:sololearn网站上的python实践
- Tiny-E-Bike:小型自行车的开源硬件CAD
- Tubular
- 小狗:小狗为Nim获取HTML页面
- java《数据结构》教学辅助网站设计与实现毕业设计程序
