Python Open3D教程:点云处理与案例分析
版权申诉
61 浏览量
更新于2024-08-26
收藏 392KB PDF 举报
"Python练习9 Open3D处理———学习如何使用Open3D库进行3D数据操作和可视化,包括安装、点云处理、近邻搜索等基础应用。"
Open3D是一个开源的C++库,提供了对3D数据进行处理、可视化和分析的功能。在Python环境中,它作为一个强大的工具被广泛用于3D点云处理和科学计算。在这个Python练习中,我们将深入理解Open3D的基本用法,包括安装、读取点云数据、多角度点云的合并以及近邻搜索。
1. **Open3D的安装**
安装Open3D非常简单,通过Python的包管理器pip即可完成:
```bash
pip install open3d
```
或者,如果你使用的是Python 3,可以运行:
```bash
pip3 install open3d
```
安装完成后,你可以通过`pip list`命令检查是否已经成功安装。
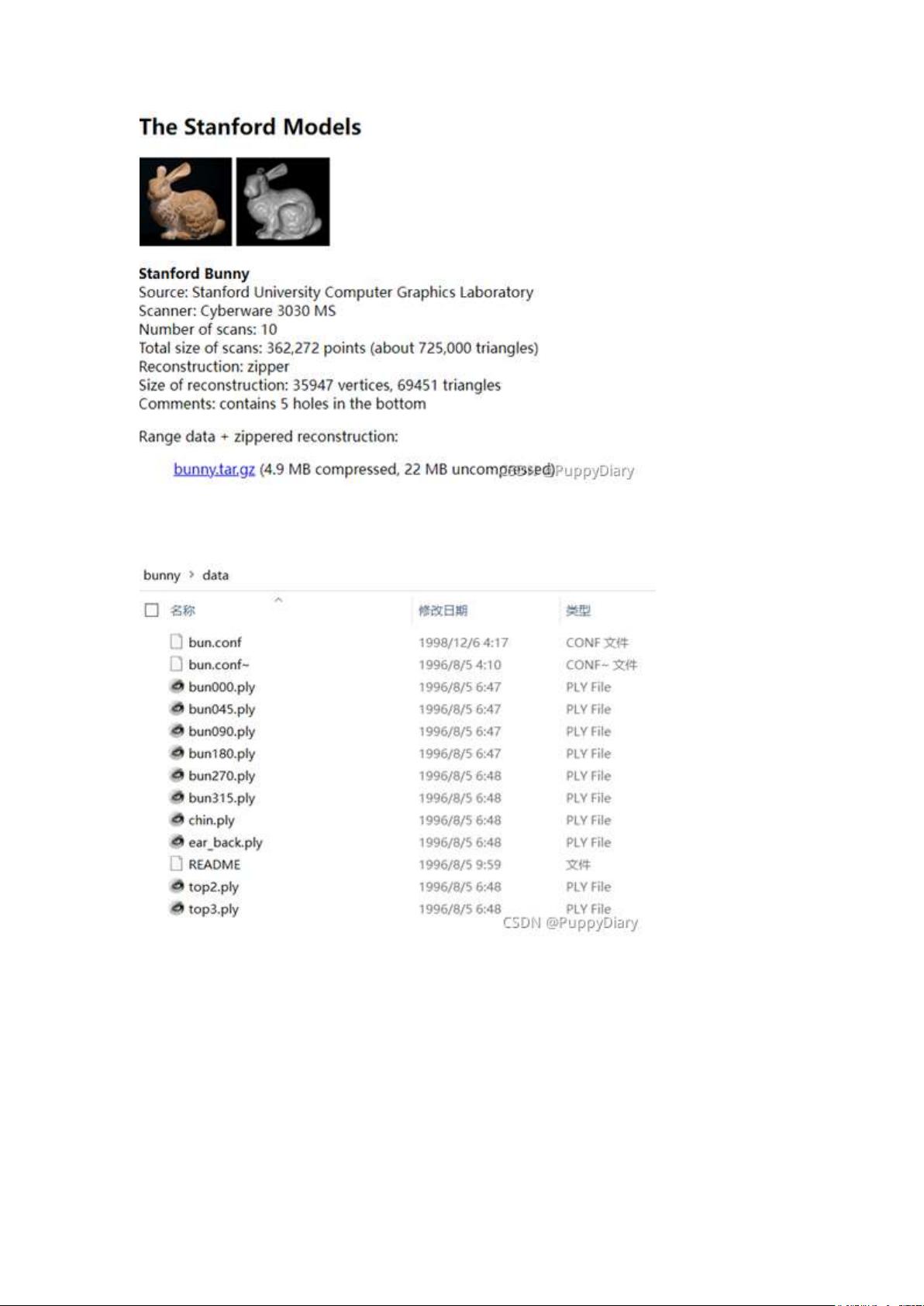
2. **案例:斯坦福兔子**
斯坦福兔子是一个经典的3D扫描模型,常用于3D视觉和点云处理的示例。在Open3D中,我们可以读取PLY格式的点云文件,然后进行可视化:
```python
import open3d as o3d
import numpy as np
import os
pcd = o3d.io.read_point_cloud(r"D:\python\Ads2021\bunny\data\bun000.ply")
o3d.visualization.draw_geometries([pcd], width=800, height=600)
```
通过`draw_geometries`函数,可以在窗口中显示点云,并通过键盘快捷键调整视图。
3. **多角度点云的拼接**
多个不同角度扫描的点云可以组合成一个完整的3D模型。例如,你可以读取多个文件并将它们合并:
```python
pcd = o3d.io.read_point_cloud(r"D:\python\Ads2021\bunny\bunny10k.ply")
o3d.visualization.draw_geometries([pcd])
```
使用Open3D提供的可视化工具,你可以通过缩放和平移查看点云的细节。
4. **近邻搜索**
在处理3D点云时,近邻搜索是一个重要的操作。Open3D提供了一个基于KD树的数据结构(`o3d.geometry.KDTreeFlann`),可以高效地执行近邻查找:
```python
pcd_tree = o3d.geometry.KDTreeFlann(pcd)
```
KD树允许你找到每个点的最近邻或一定范围内的邻居,这对于点云配准、降噪和其他算法是必要的。
文档链接:[http://www.open3d.org/docs/release/](http://www.open3d.org/docs/release/)
在这个官方文档中,你可以找到更详细的信息,包括点云的变换、滤波、分割、几何重建等多个方面的内容。
Open3D为3D数据处理提供了丰富的功能,无论是简单的点云可视化还是复杂的3D几何处理,它都能胜任。通过这个练习,你将掌握Open3D的基础操作,为进一步的3D数据分析和可视化打下坚实的基础。
①不同角度扫描到的兔子的点云
以 bun000 为例, 可以看出生成的是一片,不是整个兔子
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-12-03 上传
2021-12-04 上传
2021-12-03 上传
2021-12-03 上传
2021-12-03 上传

一诺网络技术
- 粉丝: 0
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
