"机器人运动学正解逆解D-H法原理与建模"
版权申诉
机器人运动学正解逆解PPT教案.pptx;机器人运动学正解逆解PPT教案.pptx;会计学1机器人运动学正解逆解D-H 表示法学习目标: 1. 理解 D-H 法原理 2. 学会用 D-H 法对机器人建模学习重点: 1. 给关节指定参考坐标系 2. 制定 D-H 参数表 3. 利用参数表计算转移矩阵第 1 页 / 共 60 页背景简介: 1955 年, Denavit 和 Hartenberg( 迪纳维特和哈坦伯格)提出了这一方法,后成为表示机器人以及对机器人建模的标准方法,应用广泛。 总体思想: 首先给每个关节指定坐标系,然后确定从一个关节到下一个关节进行变化的步骤,这体现在两个相邻参考坐标系之间的变化,将所有变化结合起来,就确定了末端关节与基座之间的总变化,从而建立运动学方程,进一步对其求解。第 2 页 / 共 60 页1. 第一个关节指定为关节 n, 第二个关节为n 1, 其余关节以此类推。坐标系的确定2.Z 轴确定规则:如果关节是旋转的, Z 轴位于按右手规则旋转的方向,转角 为关节变量。如果关节是;"
机器人运动学是一门研究机器人在空间中运动规律的学科,而机器人运动学的正解与逆解则是其中的重要内容。Denavit-Hartenberg表示法(D-H表示法)是描述机器人运动学的常用方法,它由Denavit和Hartenberg于1955年提出,后来成为机器人运动学建模的标准方法。本PPT教案旨在帮助学生理解D-H法的原理,掌握使用D-H法对机器人建模的方法,以及掌握制定D-H参数表和计算转移矩阵的技能。
教学目标主要包括了理解D-H法的原理和学会使用D-H法对机器人建模,其中学习重点包括给关节指定参考坐标系、制定D-H参数表以及利用参数表计算转移矩阵。教学背景介绍了D-H法的提出者以及该方法在机器人运动学中的广泛应用。
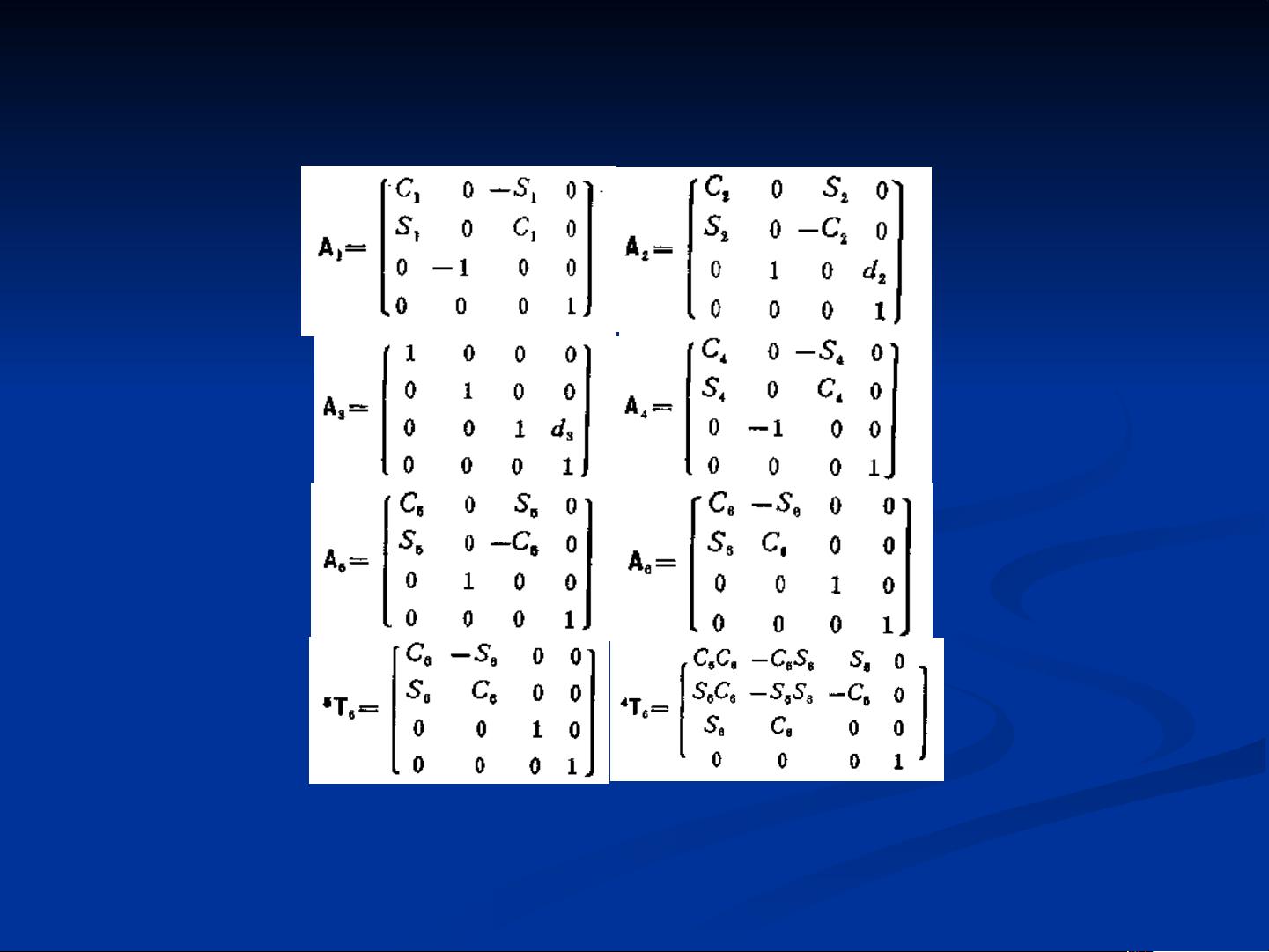
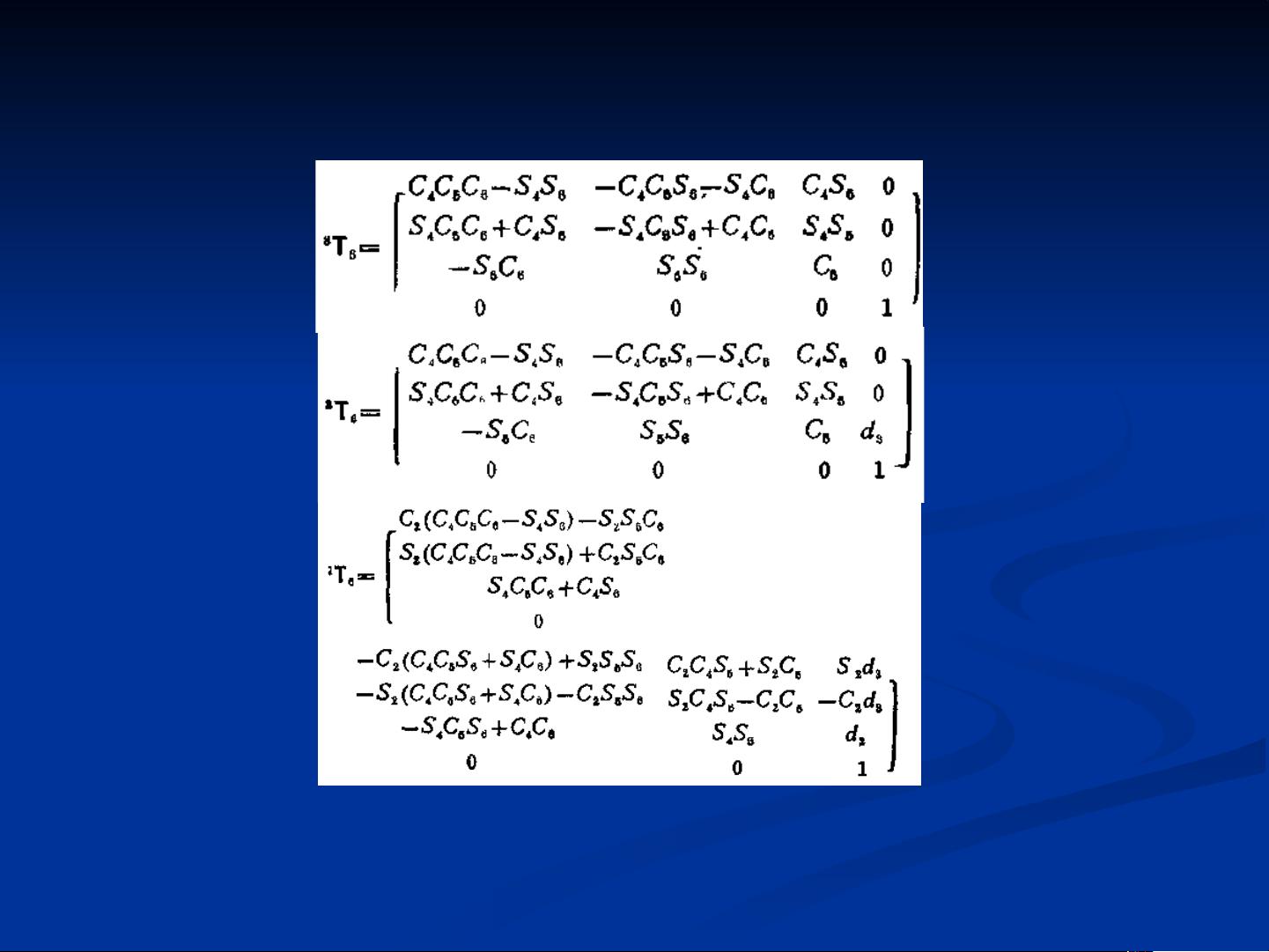
D-H方法的总体思想是首先给每个关节指定坐标系,然后确定从一个关节到下一个关节进行变化的步骤,将所有变化结合起来,从而建立机器人的运动学方程。具体地,关节的指定规则是将第一个关节指定为关节n,第二个关节为n+1,其余关节以此类推,并且根据旋转关节和移动关节确定Z轴的方向及转角变量。此外,制定D-H参数表和计算转移矩阵是学习D-H法的重点内容。
总的来说,本PPT教案通过简洁清晰的内容和直观的案例,帮助学生理解和掌握D-H法的原理和方法,为他们在未来的机器人运动学研究和工程实践中提供了重要的基础知识。

2021-10-08 上传
2021-10-08 上传
2021-10-05 上传
2021-10-05 上传
2021-10-08 上传
2021-10-07 上传

加油学习加油进步
- 粉丝: 1407
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
