机电一体化系统设计:多自由度机械手课程设计详解
版权申诉
79 浏览量
更新于2024-07-01
收藏 1.6MB PDF 举报
"多自由度机械手课程设计.pdf"
这篇文档是关于多自由度机械手的机电一体化系统设计课程设计的详细说明书。该设计涵盖了从机械手的概述、总体方案设计到机械系统和控制系统硬件电路的各个部分。设计任务旨在通过一系列的计算和设计步骤,构建一个能够执行特定任务的机械手。
在机械手的概述中,介绍了机械手的基本概念,它是模仿人手功能的自动化装置,用于按预设程序抓取、搬运物体或操作工具。机械手广泛应用于各种工业领域,如机械制造、冶金、电子、轻工和原子能,以提高生产效率并确保在有害环境下的安全性。
在总体方案设计中,首先明确了设计任务,并确定了机械手的基本形式、主要部件和驱动机构。机械手的形式选择可能基于其应用场景和功能需求,而驱动机构的选择则考虑了动力源和运动控制的灵活性。
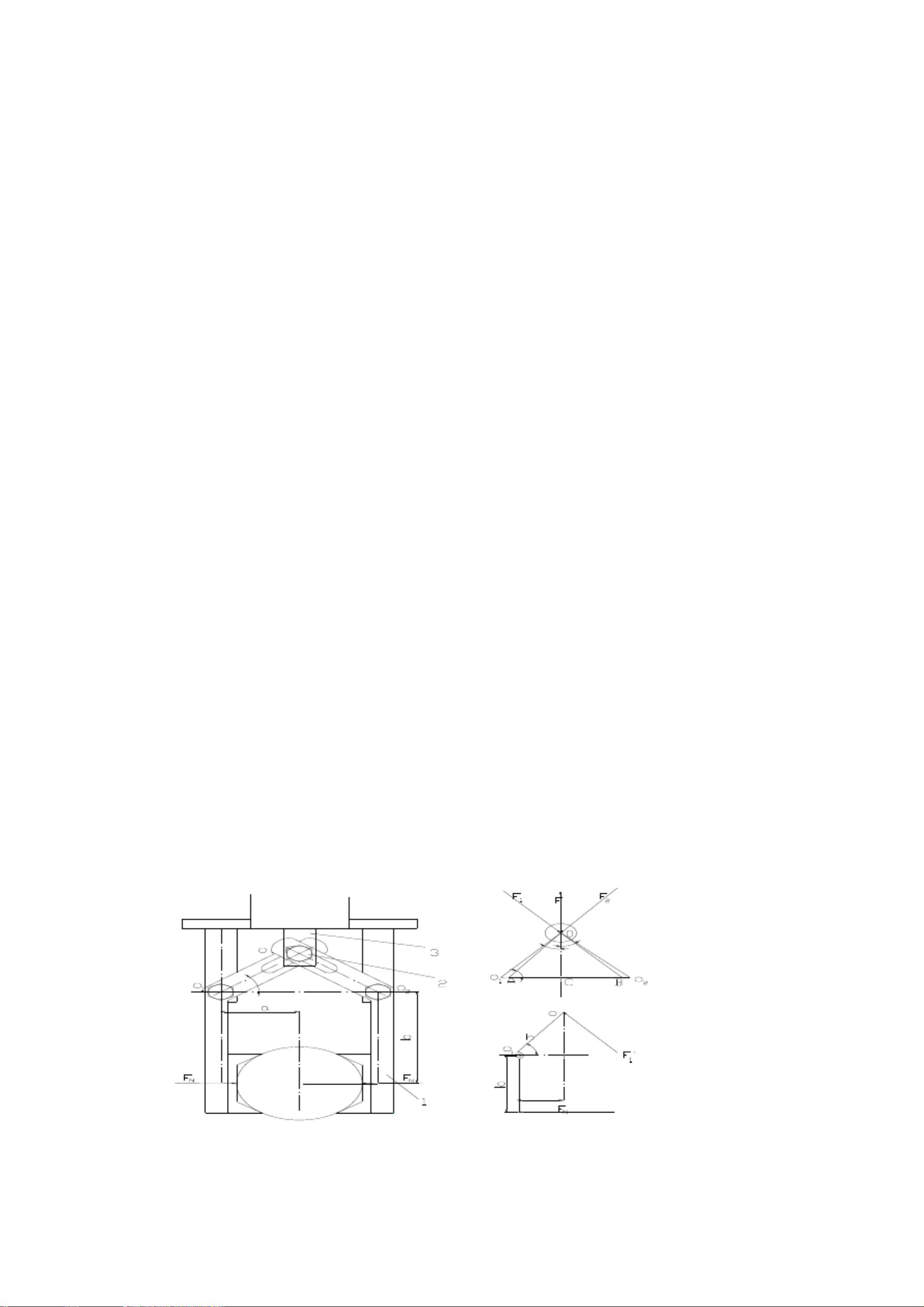
在机械系统设计部分,详细讨论了手部、腕部、臂部和机身的设计计算。手部设计涉及手抓的设计,包括抓持精度分析和弹簧的设计计算,以确保稳定抓取。腕部设计考虑了其结构和驱动机构的选择,以实现灵活转动。臂部设计涉及手臂结构的选择和液压缸的工作压力计算,确保足够的承载能力和运动范围。机身的设计包括整体布局、回转和升降机构的计算,以及轴承的选择分析,以保证机械手的稳定性和运动性能。
在控制系统硬件电路设计部分,介绍了可编程逻辑控制器(PLC)的基础知识,包括其结构、种类和分类,特别是FX2N系列三菱PLC的特点。还讲解了接近开关传感器、I/O接口和行程开关的功能与原理,这些都是实现机械手运动控制的关键组件。最后,电路的总体设计包括回路设计、输入/输出分布表以及机械手的程序设计,特别是步进电机的运行控制,这是实现机械手精确动作的重要环节。
参考文献部分列出了在设计过程中参考的相关资料,为深入学习提供了依据。
这份课程设计详细地展示了如何综合运用机电一体化知识来设计一个多自由度机械手,包括机械结构和电气控制两大部分,为理解和实践此类项目提供了全面的指导。

采用直线缸来实现手臂平动 1.2m
升降和回转。
。(4)机身,采用一个直线缸和一个回转缸来实现手臂
2.2.3 驱动机构的选择
驱动机构是工业机械手的重要组成部分 , 工业机械手的性能价格比在很大程度上取决于
驱动方案及其装置。根据动力源的不同, 工业机械手的驱动机构大致可分为液压、气动、电动
和机械驱动等四类。采用液压机构驱动机械手,结构简单、尺寸紧凑、重量轻、控制方便,驱
动力大等优点。因此,机械手的驱动方案选择液压驱动。
4
剩余36页未读,继续阅读
2022-07-12 上传
128 浏览量
2021-11-25 上传
104 浏览量
153 浏览量
2022-07-12 上传
2022-07-12 上传

G11176593
- 粉丝: 6927
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Cherimoya Advanced Hotstar Subtitle Fetcher-crx插件
- centOS初学者必备软件-配合本人博客使用(FileZilla、putty汉化版).zip
- 分类好的17flowers dataset
- uadeutschland.github.io:匿名的Deutschsprachige主页
- localize-maven:Localize.io Maven存储库
- simplestone_metadeck
- 经典的大富翁游戏
- react-flux-webpack-template:这是一个带有 webpack 的 react 和flux 模板
- 【最新版】coconutBattery_390.zip【亲测可用】最好的Mac,iPhone和iPad中电池质量的实时信息
- pyEntropy:Python的熵
- spring-boot-web-mustache
- Swipe Gesture-crx插件
- Redactor-crx插件
- 根据url一键爬取前端页面资源文件---小飞兔
- 矮个子:缩短链接的应用程序
- beamr:Beamer的最小标记语言
