图像边缘检测:Prewitt、Sobel与Laplace算子比较
需积分: 0 173 浏览量
更新于2024-08-05
收藏 886KB PDF 举报
本文主要介绍了几种常见的图像边缘检测算子,包括Prewitt算子、Sobel算子、Roberts算子以及Laplace算子和LOG算子,并对比了它们的特点和应用。
图像边缘检测在计算机视觉和图像处理领域扮演着重要的角色,它能够帮助我们识别图像中的边界,从而提取出关键信息。以下是对几种算子的详细解释:
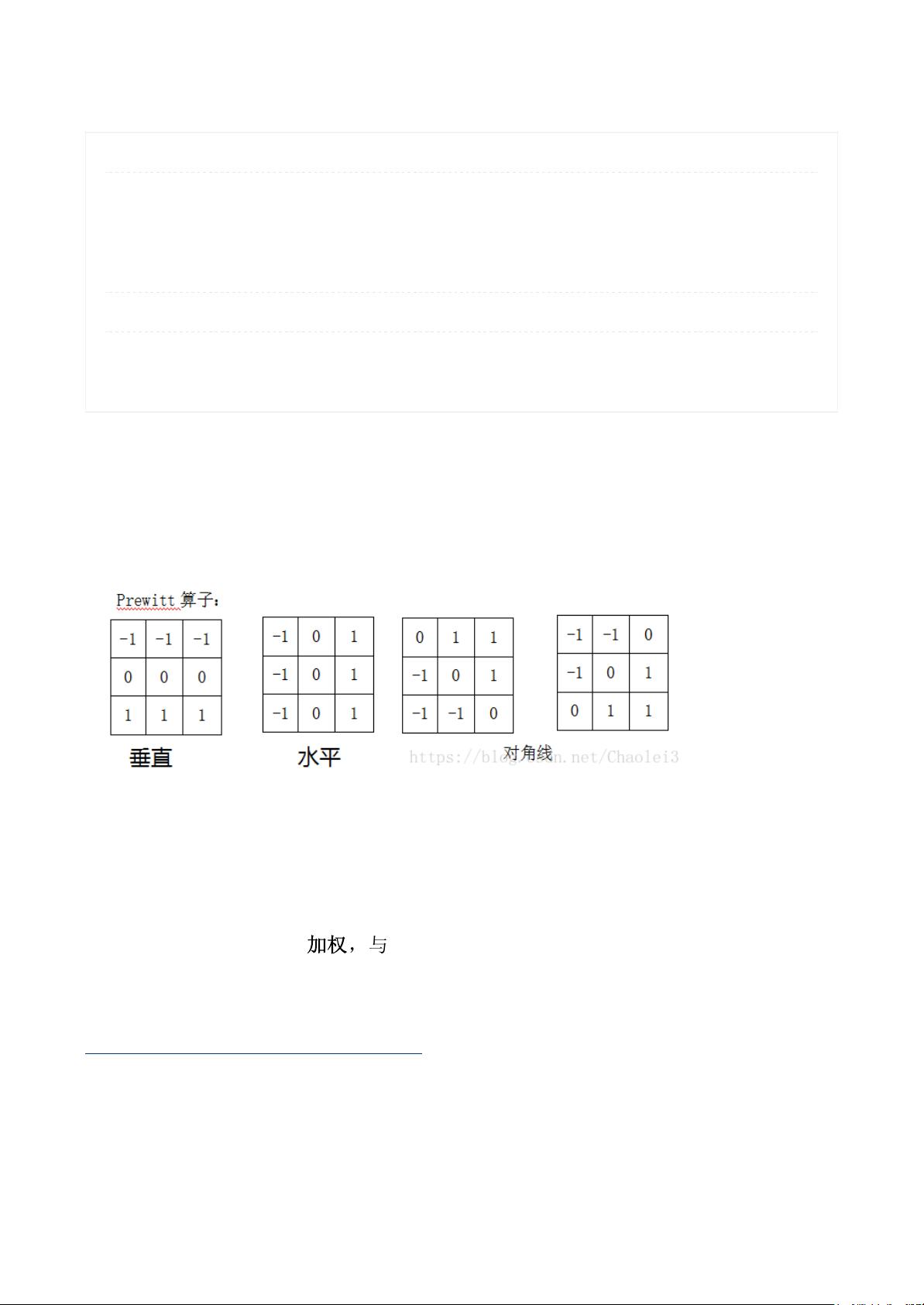
1. Prewitt算子:Prewitt算子是一种简单的边缘检测方法,它通过对邻域像素进行平均来平滑图像,从而降低噪声的影响。然而,这种方法会导致高频信息丢失,使图像变得模糊,对边缘定位不够精确。
2. Sobel算子:Sobel算子是对Prewitt算子的改进,考虑了邻域像素的不同权重,距离当前像素越远的像素影响越小。这使得Sobel算子在抑制噪声和边缘检测方面表现出更好的性能。Sobel算子包含两个3x3的模板,分别用于计算水平和垂直方向的梯度,通过这两个方向的梯度信息可以确定边缘的方向和强度。
3. Roberts算子:Roberts算子使用两个正交的2x2矩阵来检测图像的边缘。相比于Prewitt和Sobel,Roberts算子在处理细节和噪声方面可能稍逊一筹,但它对于直线边缘的检测效果较好。
4. Laplace算子:Laplace算子是一种二阶微分算子,用于检测图像的零交叉点,这些位置通常是边缘的潜在位置。然而,Laplace算子对噪声敏感,通常需要先进行预处理,如使用高斯滤波器来平滑图像。
5. LOG算子(高斯拉普拉斯算子):这是Laplace算子的一种变体,先用高斯滤波器去除噪声,然后应用Laplace算子。这种方法结合了高斯滤波器的噪声抑制能力和Laplace算子的边缘检测能力,通常能得到更好的边缘检测结果。
这些算子各有优缺点,选择哪种取决于具体的应用需求。例如,如果噪声较大,可能需要先进行噪声过滤,然后再进行边缘检测。在实际应用中,还可能需要结合其他技术,如阈值处理和连通成分分析,以进一步优化边缘检测的结果。
总结来说,图像边缘检测是图像处理的重要步骤,而选择合适的边缘检测算子对于获取高质量的边缘信息至关重要。每种算子都有其特定的适用场景,理解它们的工作原理和特性,可以帮助我们在实际项目中做出明智的选择。
1.Prewitt
2.sobel
3.canny
4.Roberts
5.Laplace算子
6.LOG算子(高斯拉普拉斯算子)
不同算子的比较
1.Prewitt
prewitt算子对噪声有抑制作用,抑制噪声的原理是通过像素平均,但是像素平均相当于对
图像的低通滤波,低通滤波会造成高频的信息丢失,从而使图像模糊,无论这种程度或大或小,
这种操作后的结果是存在的,所以Prewitt算子对边缘的定位不如Roberts算子。
2.sobel
sobel算子是prewitt算子的改进形式,改进之处在于sobel算子认为,邻域的像素
对当前像素产生的影响不是等价的,所以距离不同的像素具有不同的权值,对算子结
果产生的影响也不同。一般来说,距离越远,产生的影响越小。正因为Sobel算子对
于像素的位置的影响做了
加
权
,与Prewitt算子、Roberts算子相比因此效果更好。相
比较Prewitt算子,Sobel模板能够较好的抑制(平滑)噪声。 sobel要比prewitt更
能准确检测图像边缘。
http://www.cnblogs.com/ronny/p/3387575.html
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-13 上传
2022-07-15 上传
2022-07-15 上传
2019-08-13 上传
2022-09-22 上传

MsingD
- 粉丝: 42
- 资源: 295
 我的内容管理
展开
我的内容管理
展开







最新资源
- 音乐播放次数最多的谱图还原:音乐播放次数最多
- Cpp_Project_1:C ++ Udacity课程的第一个项目
- eclipse-cpp-mars-R-linux-gtk-x86_64.tar.gz
- react-design-furnitures:我的第一个应用程序
- Titanic_Dataset_PurePython
- AndroidStudio_Projects
- opencv-demo-webapp-snap:一个简单的 OpenCV webapp 示例
- ACCESS网上聊天室ASP毕业设计(源代码+论文+开题报告+任务书+答辩PPT).zip
- Accuinsight-1.0.33-py2.py3-none-any.whl.zip
- Auth0-Regular-Web-App-Test
- WebFamily:Beetlex Web SPA应用组件
- 费利斯cumplea-os
- MainPartExtractor:获取句子的主谓宾
- tornado_circus_heroku:使用Circus在一个Heroku dyno上管理一堆Tornado应用程序进程
- 模拟量的转换程序1.rar
- test-deploy-actions
