

6
2.2.1 电磁式位置传感器
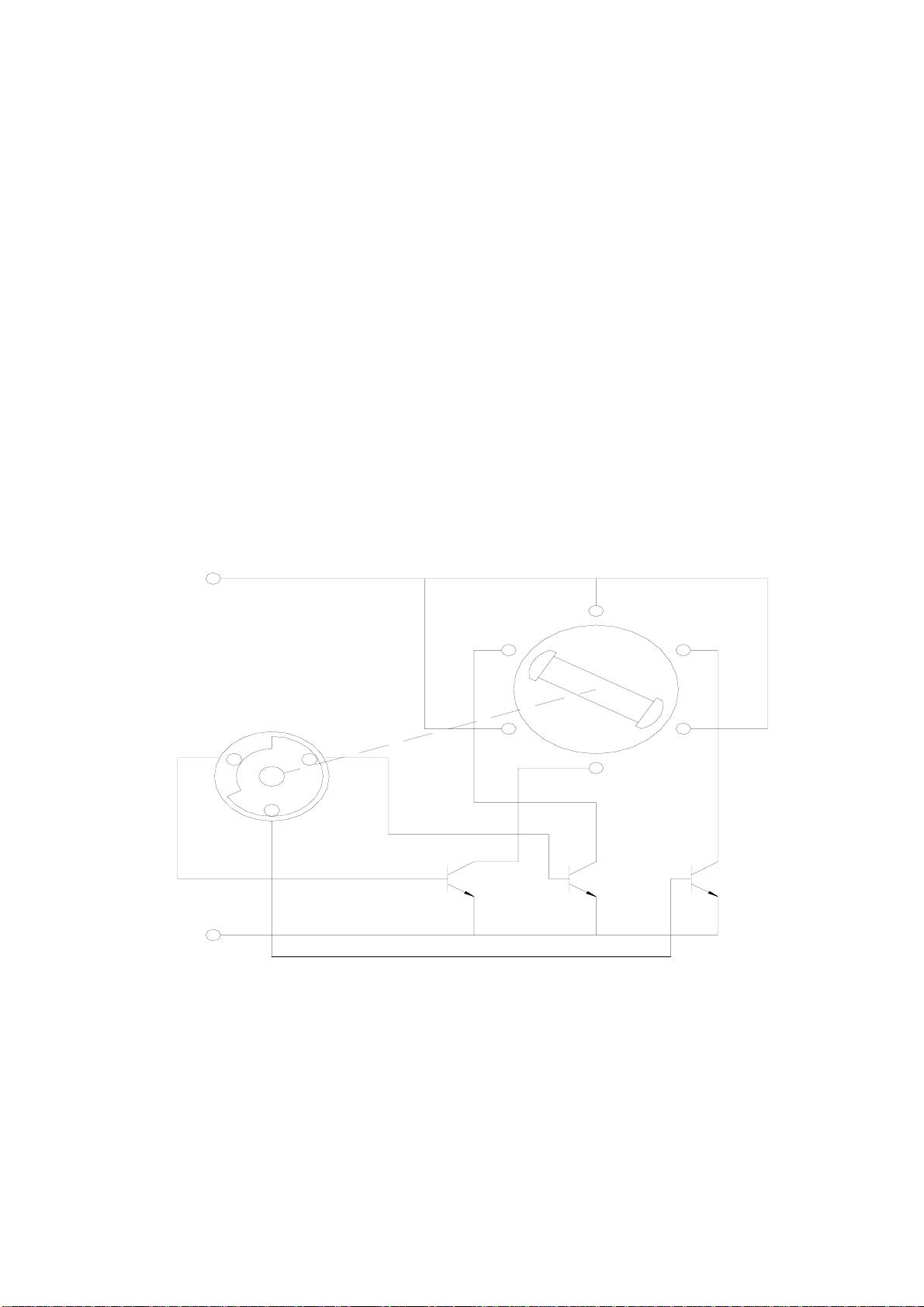
电磁式位置传感器是利用电磁效应来实现其位置测量作用的,有开口变压
器、铁磁谐振电路、接近开关等多种类型。在无刷直流电机中,用得较多的是
开口变压器,其中用于三相无刷直流电机的开口变压器由定子和跟踪转子两部
分组成。定子一般由硅钢片的冲片叠成,或用高频铁氧体材料压铸而成,一般
有六个极,这六个极之间的间隔分别是 60 度,其中三个极绕上一次绕组,并相
互串联后通以高频电源,另外三个极分别绕上二次绕组 W
A
、W
B
、W
C
。它们之
间分别间隔 120 度。跟踪转子是一个用非导磁材料做成的圆柱体,并在它上面
镶上一块 120 度的扇形导磁材料,在安装时将它同电机转轴相联,其位置对应
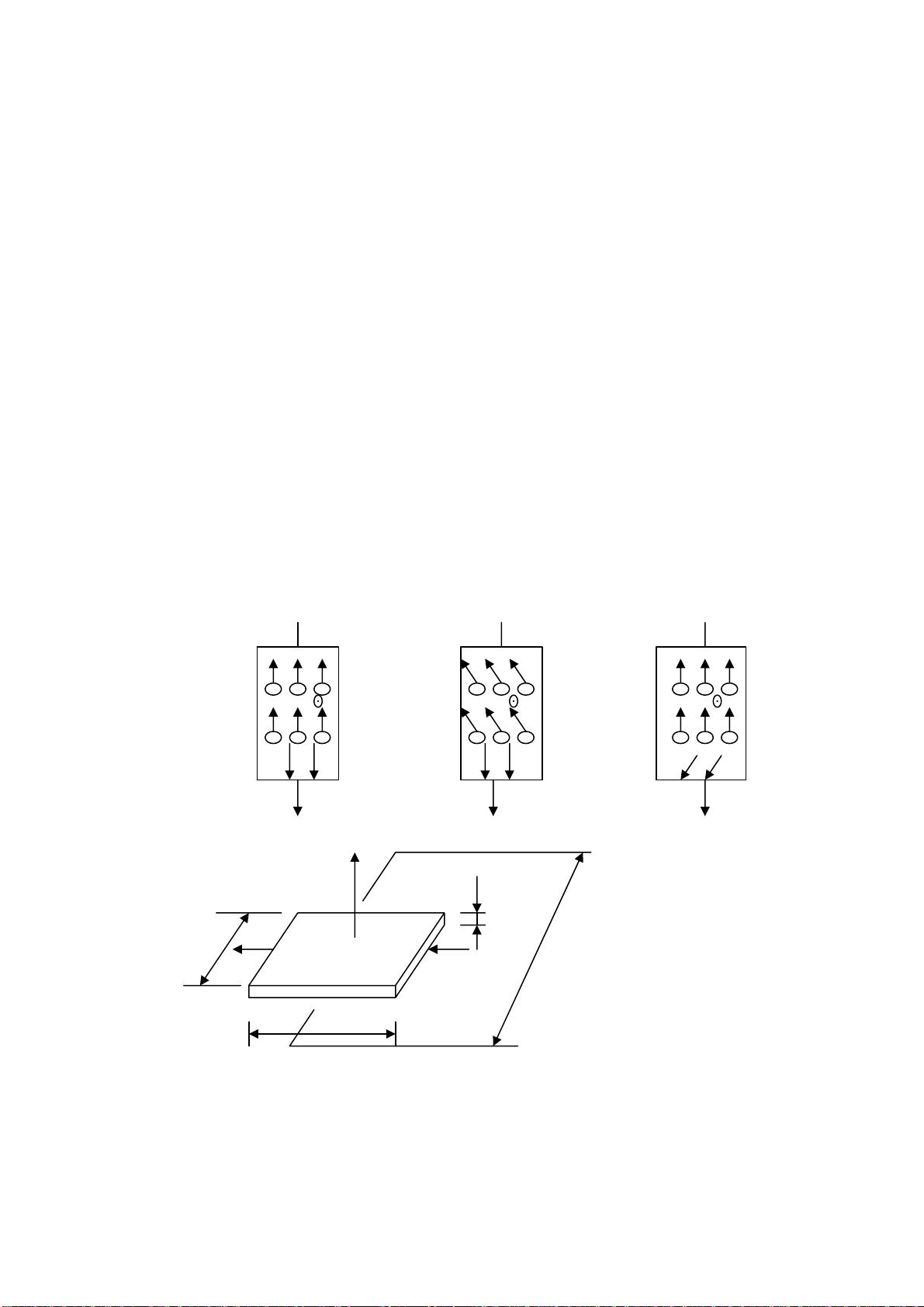
于某一个磁极。假设跟踪转子处在某一位置时,一次绕组所产生的高频磁通通
过跟踪转子上的导磁材料耦合到绕组 W
B
上,故在上产生感应电压 U
B
,而在另
外两相二次绕组 W
A
、W
C
上由于无耦合回路同一次绕组相联,其感应电压 U
A
、
U
C
基本上为零。随着电机转子的转动,跟踪转子的导磁扇形片也跟着转动,使
之逐步离开绕组 W
B
而向绕组 W
C
靠近(假定为逆时针旋转),从而使其二次电压
U
B
下降、U
C
上升。就这样,随着电机转子运动,在开口变压器上分别依次感应
出电压 U
B
、U
C
、U
A
。
开口变压器由于结构简单、性能可靠,因而目前得到了广泛应用。扇形导
磁片的角度一般略大于 120 度电角度,常采用 130 度电角度。在三相全控电路
中,为了换相译码器的需要,扇形导磁片的角度为 180 度电角度,不是 120 度
电角度,也不是 130 度电角度。同时,扇形导磁片的个数应同无刷直流电机的
极对数相等。由于震荡电源的频率高达几千赫,故变压器的铁心往往采用铁氧
体材料,频率较低的铁心可以采用其他软磁材料。
设计开口变压器时,一般要求把它的绕组同振荡电源结合起来同意考虑,
以便得到较好的输出特性。
电磁式位置传感器具有输出信号大、工作可靠、寿命长、使用环境要求不
高、适应性强、结构简单和紧凑等优点;但这种传感器信噪比较大,体积较大,
同时其输出波形为交流,一般需整流、滤波后方可应用。
2.2.2 光电式位置传感器
光电式位置传感器是利用光电效应制成的,由跟随电机转子一起旋转的遮
剩余70页未读,继续阅读

wencongtu
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 最优条件下三次B样条小波边缘检测算子研究
- 深入解析:wav文件格式结构
- JIRA系统配置指南:代理与SSL设置
- 入门必备:电阻电容识别全解析
- U盘制作启动盘:详细教程解决无光驱装系统难题
- Eclipse快捷键大全:提升开发效率的必备秘籍
- C++ Primer Plus中文版:深入学习C++编程必备
- Eclipse常用快捷键汇总与操作指南
- JavaScript作用域解析与面向对象基础
- 软通动力Java笔试题解析
- 自定义标签配置与使用指南
- Android Intent深度解析:组件通信与广播机制
- 增强MyEclipse代码提示功能设置教程
- x86下VMware环境中Openwrt编译与LuCI集成指南
- S3C2440A嵌入式终端电源管理系统设计探讨
- Intel DTCP-IP技术在数字家庭中的内容保护
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


