Qualcomm SDM450/SDA450 设备规格说明书
需积分: 10 137 浏览量
更新于2024-07-07
1
收藏 1.25MB PDF 举报
"80-pc173-1_k_sdm450_sda450_device_specification.pdf" 是一份由 Qualcomm Technologies, Inc. 及其关联公司发布的内部文档,包含敏感信息,禁止公开披露。这份文档仅限于 Qualcomm Technologies, Inc. 及其关联公司的员工内部传播,且在分发前需要得到 Qualcomm 配置管理的明确批准。文档内容未经 Qualcomm Technologies, Inc. 的书面许可,不得复制、修改或部分使用,也不得向非 Qualcomm 公司及其关联公司的员工透露。
文档涉及的产品是 SDM450 和 SDA450,这是 Qualcomm Technologies, Inc. 及其子公司开发的先进产品。SDM450 和 SDA450 设备规格书(Device Specification)是80-PC173-1 Rev.K 版本,详细介绍了这两个设备的技术细节和功能特性。
SDM450 和 SDA450 是 Qualcomm 的移动平台解决方案,专为各种智能设备设计,可能包括智能手机、平板电脑或其他嵌入式系统。它们基于14纳米工艺制程,这代表了较高的能效和更小的物理尺寸,使得设备可以在不牺牲性能的情况下,实现更长的电池寿命和更紧凑的设计。
在14纳米工艺下,SDM450 和 SDA450 可能集成了高性能的中央处理器(CPU)、图形处理单元(GPU)、数字信号处理器(DSP)以及其他各种组件,如图像信号处理器(ISP)、调制解调器等。这些组件共同协作,提供了处理复杂计算任务、运行高级操作系统、支持高清多媒体播放以及连接到4G/5G网络的能力。
设备规格书中通常会涵盖以下关键内容:
1. **CPU 架构**:描述 CPU 的核心数量、类型(如 ARM Cortex-A 系列)以及每个核心的时钟速度,以评估处理能力。
2. **GPU 规格**:说明 GPU 型号、性能指标,用于处理图形密集型任务和游戏。
3. **内存和存储接口**:定义 RAM 和内置存储的类型和最大支持容量。
4. **连接性**:包括 Wi-Fi、蓝牙、GPS、LTE 或 5G 调制解调器等功能的详细信息。
5. **电源管理**:描述能源效率措施和电池续航能力。
6. **多媒体支持**:如视频编码/解码能力、屏幕分辨率支持等。
7. **传感器支持**:如加速度计、陀螺仪、磁力计等。
8. **接口和扩展性**:USB、HDMI、音频接口和其他外围设备连接的规范。
由于文档的保密性质,无法提供具体的技术参数。不过,可以肯定的是,SDM450 和 SDA450 设备规格书将为设计者和开发者提供全面的硬件和软件接口信息,以支持他们在开发基于这些平台的产品时进行有效的系统集成和优化。这些信息对于制造商和开发者来说至关重要,他们需要根据这些规格来设计兼容的硬件和软件,确保设备的稳定性和性能满足用户需求。
80-PC173-1 Rev. K Confidential – Qualcomm Technologies, Inc. and/or its affiliated companies – May Contain Trade Secrets 16
MAY CONTAIN U.S. AND INTERNATIONAL EXPORT CONTROLLED INFORMATION
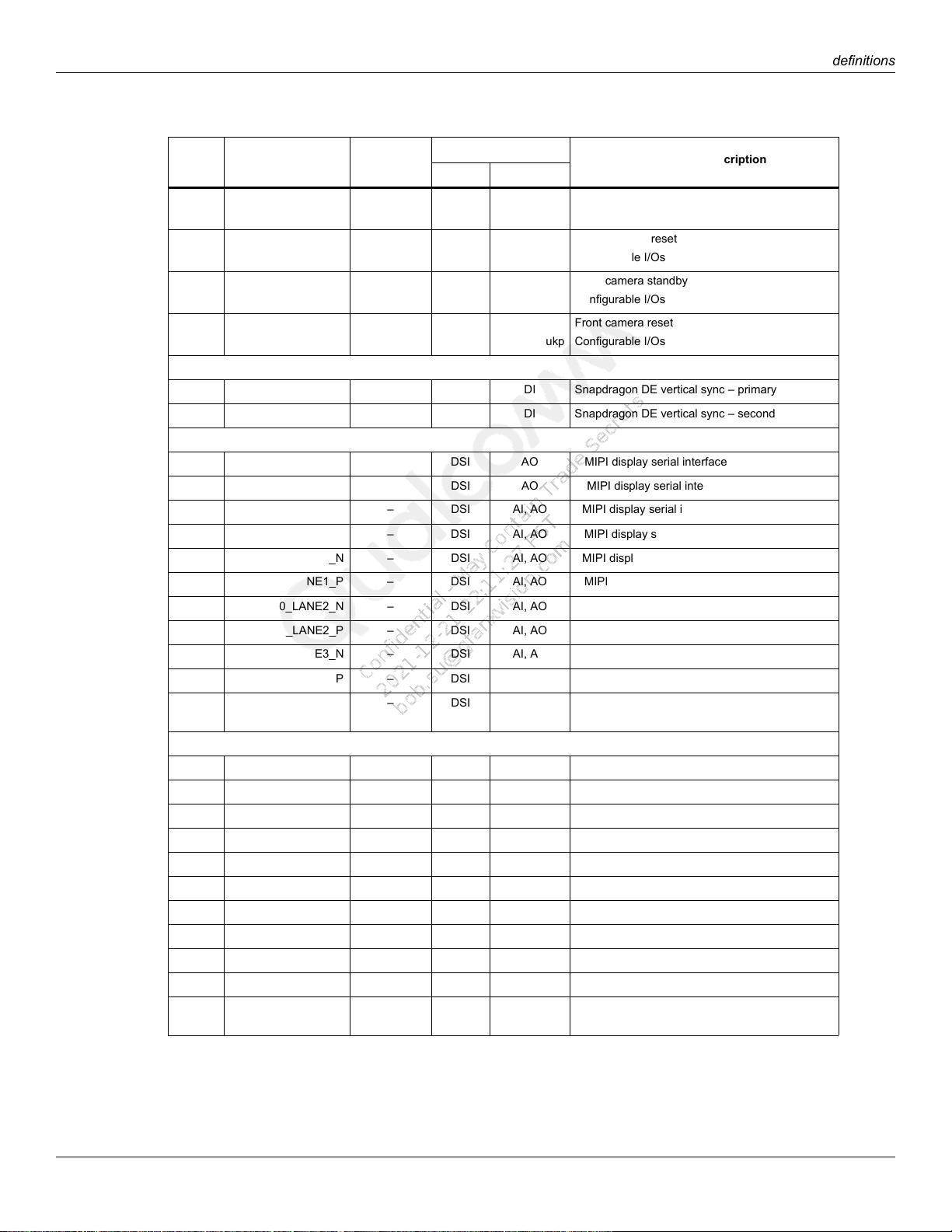
SDM450/SDA450 Device Specification Pin definitions
BH20 BOOT_CONFIG[11]
GPIO_111
P3 DI
B-PD:nppukp
fast_boot_select bit 11
Configurable I/O
P2 BOOT_CONFIG[12]
GPIO_35
P3 DI
B-PD:nppukp
fast_boot_select bit 12
Configurable I/O
U5 BOOT_CONFIG[13]
GPIO_132
P3 DI
B-PD:nppukp
fast_boot_select bit 13
Configurable I/O
BF2 BOOT_CONFIG[14]
GPIO_130
P3 DI
B-PD:nppukp
fast_boot_select bit 14
Configurable I/O
L37 FORCED_USB_
BOOT
GPIO_37
P3 DI
B-PD:nppukp
Forced USB boot
Configurable I/O
1. See Table 2-1 for parameter and acronym definitions.
Table 2-3 Pin descriptions: memory support functions
Pad #
Pad name
and/or function
Pad name
or alt function
Pad characteristics
11
Functional description
Voltage Type
LPDDR3 interface
B30 EBI0_CA_0 – P1 DO LPDDR3 command/address bit 0
A29 EBI0_CA_1 – P1 DO LPDDR3 command/address bit 1
A27 EBI0_CA_2 – P1 DO LPDDR3 command/address bit 2
B26 EBI0_CA_3 – P1 DO LPDDR3 command/address bit 3
A25 EBI0_CA_4 – P1 DO LPDDR3 command/address bit 4
A15 EBI0_CA_5 – P1 DO LPDDR3 command/address bit 5
B14 EBI0_CA_6 – P1 DO LPDDR3 command/address bit 6
A13 EBI0_CA_7 – P1 DO LPDDR3 command/address bit 7
A11 EBI0_CA_8 – P1 DO LPDDR3 command/address bit 8
B10 EBI0_CA_9 – P1 DO LPDDR3 command/address bit 9
E21 EBI0_CAL – P1 AI LPDDR3 calibration resistor
A23 EBI0_CK – P1 DO LPDDR3 differential clock positive
B22 EBI0_CKB – P1 DO LPDDR3 differential clock negative
A19 EBI0_CKE_0 – P1 DO LPDDR3 clock enable 0
A17 EBI0_CKE_1 – P1 DO LPDDR3 clock enable 1
A21 EBI0_CS_N_0 – P1 DO LPDDR3 chip select 0
B18 EBI0_CS_N_1 – P1 DO LPDDR3 chip select 1
E23 EBI0_DM_0 – P1 DO LPDDR3 data mask for byte 0
C19 EBI0_DM_1 – P1 DO LPDDR3 data mask for byte 1
A33 EBI0_DM_2 – P1 DO LPDDR3 data mask for byte 2
B8 EBI0_DM_3 – P1 DO LPDDR3 data mask for byte 3
E33 EBI0_DQ_0 – P1 B LPDDR3 data bit 0
Table 2-2 Boot configuration GPIOs
Pad #
Pad name
and/or function
Pad name
or alt function
Pad characteristics
11
Functional description
Pad Voltage
剩余96页未读,继续阅读
537 浏览量
116 浏览量
2024-04-03 上传
181 浏览量
2022-09-24 上传
126 浏览量
105 浏览量
2023-10-09 上传
2021-03-28 上传

sujinchao
- 粉丝: 1
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- app-subtags:BCP 47语言标记是从IANA子标记注册表中的子标记构建的。 此工具可帮助您查找或查找子标签并检查语言标签中的错误
- pwdhash-webextension:用于Firefox的PwdHash Webextension
- Moveit
- alloc.h头文件
- 易语言-易语言多线程例子
- a-lumen-blog
- easyrdf:EasyRdf是一个PHP库,旨在使其易于使用和产生RDF
- 数据库课程设计 网址.zip
- 关于车辆控制装置,车辆控制方法和车辆控制系统的介绍说明.rar
- 如何使用Visual Studio 2008创建用于Postgresql数据库的数据库项目?
- sk8erboyz:专案1第1组
- c51单片机 用74HC273输出数据(51/96/88/ARM)
- .net简单订票系统开发.zip
- CJL 插件实现 Js 图片旋转
- todoListW3S:W3S TodoList
- QDate
