GPS与全站仪组合航向测量技术研究
需积分: 9 23 浏览量
更新于2024-08-11
收藏 481KB PDF 举报
"GPS与全站仪组合测量载体航向模型研究 (2005年):该研究探讨了如何在不同载体运动状态下,通过适当的处理方法对齐GPS和全站仪测量数据的时间标记,以提高航向测量精度。研究显示,这种组合测量在静态条件下的精度可达30",动态条件下精度可达到2'。该模型适用于船舶航行前的设备校准和进港导航,能缩短出航反应时间,确保精准进港。
文章由海军工程大学电气工程系的研究人员完成,得到了国家杰出青年科学基金和国家自然科学基金的支持。作者们指出,尽管GPS系统在航向测量上有诸多优势,如全球覆盖、全天候工作、实时性、无累计误差,但在海上环境下,多路径效应和电磁干扰可能降低动态测量精度。
全站仪作为一种高精度、快速、操作简单的测量工具,随着自动化控制技术的进步,可以用于动态测量。研究中提出了两点测角测向模型,通过两台全站仪同时观测载体的首尾点,计算出航向角。模型假设包括固定测站坐标和载体上的观测点坐标。通过全站仪的测距和角度信息,可以解算出航向。
该模型的应用场景主要包括船舶导航,尤其在出航和进港时,能够有效提高导航效率和准确性。此外,模型的误差分析公式和试验数据为实际应用提供了理论支持,有助于进一步提升GPS与全站仪组合测量的性能。
关键词涉及GPS系统、姿态测量、航向,以及相关领域的分类号,如P228.42,表明该研究聚焦于地球定位技术和海洋导航。这项工作为航海安全和效率提供了新的测量策略,并为未来的技术改进和优化奠定了基础。
收稿日期:2005-03-30 。
项目来源:国家杰出青年科学基金资助项目(40125013);国家自然科学基金资助项目 (40376011)。
文章编号:1671-8860(2005)06-0510-04 文献标志码:A
GPS 与全站仪组合测量载体航向模型研究
周红进
1
许江宁
1
马 恒
1
边少锋
1
(1 海军工程大 学电气工程系,武汉 市解放大道仁寿路 736 号 ,430033)
摘 要:针对载体运动状态的不同,选择合适的数据处理方法对齐 GPS 和全站仪两种测量设备测出数据的时
间标记,并给出了误差分析公式和试验数据分析结果。结果表明,GPS 与全站仪组合测量载体航向时,其静
态精度可以达到 30",动态精度可以达到 2′。模型可以应用于船舶出航前以及进港时的导航设备标校,缩短
其出航反应时间,引导其准确进港靠岸。
关键词:GPS;姿态测量;航向
中图法分类号:P2 28 . 42
20 世纪 80 年代中期,GPS 系统应用于舰艇
姿态测量方面的研究开始兴起
[1 ~ 3]
。 GPS 系统测
量载体航向具有全球、全天候、实时连续、无累计
误差等特 点
[4 ,5]
。 但对于运行于海上的载体而
言,由于受多路径效应、电磁干扰等因素的影响,
使得其动态航向测量精度受到了较大的影响
[6]
。
全站仪由光电测距仪、电子经纬仪和微型计
算机组合而成,不仅可以自动测距、测角、记录和
计算,而且精度高、速度快、操作简便
[7 ]
。自动化
控制、目标识别、在线控制等理论的发展使全站仪
摆脱了传统光学仪器无法跟踪运动目标的限制,
这为全站仪用于动态测量提供了前提条件。
1 组合测量模型研究
1 . 1 两点测角测向模型
[8 ]
两点测角测向模型使用两台全站仪,分别观
测两个代表载体首尾线的观测点。通过全站仪观
测的测距、方位角、高度角等信息,利用已知的测
站站点坐标,确定观测点坐标,并通过两个观测点
的坐标,解算出航向角 K。
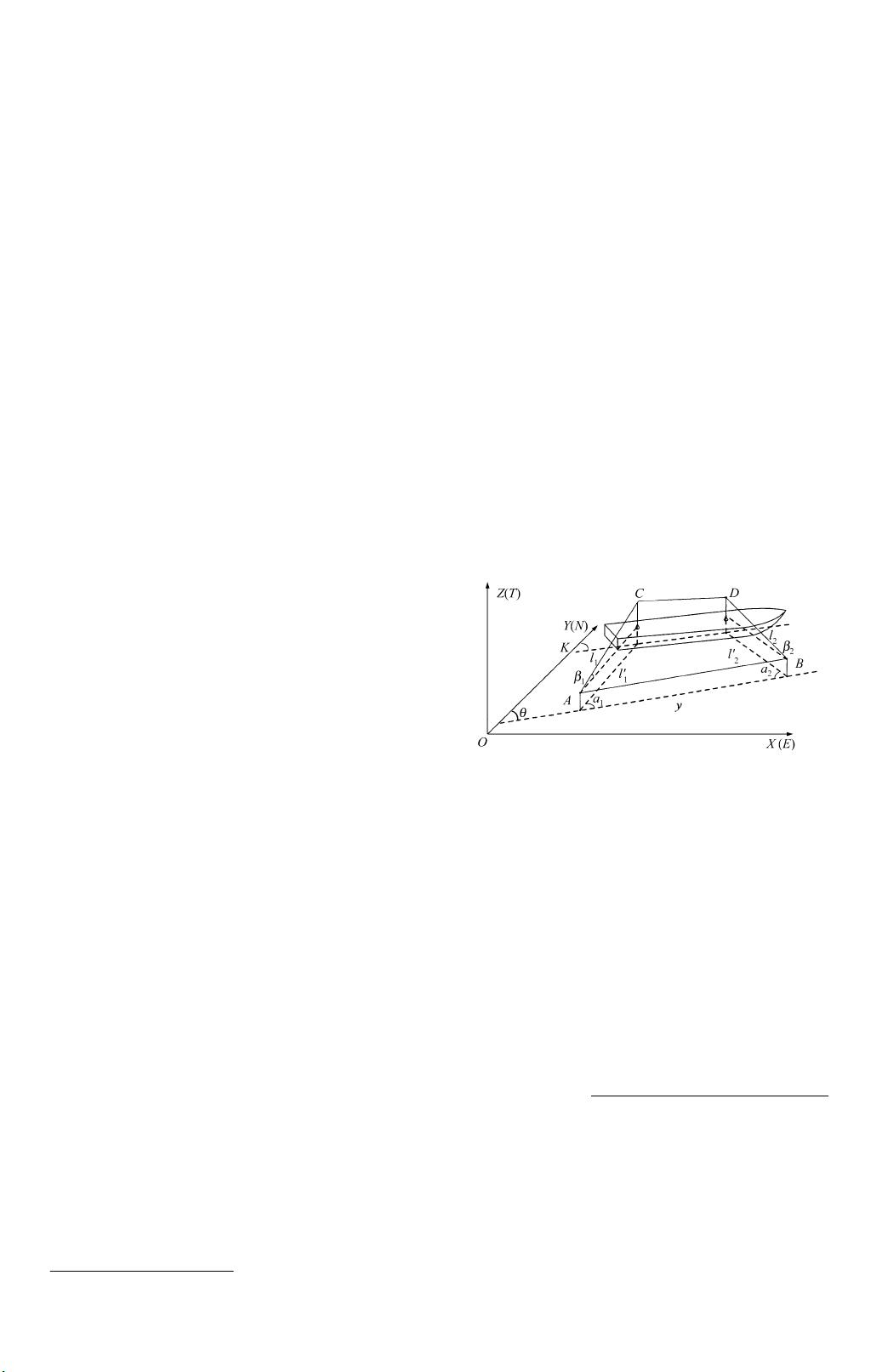
如图 1 所示,模型采用两台全站仪构成两点测
角测距系统,以 AB为基线,在 A、B 两点上架设全
站仪,以载体上的 C、D 两点为被观测点。 A 点处
的全站仪观测 C 点,B 点处的全站仪观测 D 点。
为了便于模型的求解,在此模型中作如下假设
。
图 1 两点测角测向模型三维原理图
Fig. 1 Three-D im ens io nal Principle M od el o f
Measuring Distance and Angle with T wo Points
1)图 1 中 l
1
、l
2
、α
1
、α
2
、β
1
、β
2
(分别代表 AC、
BD长,AC、BD 与 AB 水平夹角和 AC、BD 高度
角)分别为两台全站仪的测距、水平角、高度角观
测量。载体位于基线 AB以北。
2)基线 AB 真方位角为 θ,基线 AB 平距为 y。
3)CD 与载体首尾线平行,且 D 点位于载体
首位置,C 点位于载体尾位置。
由图 1 可得模型的最终解算式为:
K =θ-arctan
l
2
cosβ
2
sinα
2
- l
1
cosβ
1
sinα
1
y - l
2
cosβ
2
cosα
2
- l
2
cosβ
1
cosα
1
(1)
利用已知坐标的两个 B 级国家标准定位点,
使用两台 TCA1105 型全站仪通过测量视线(即
载体首尾线)与基线间的夹角,可以测量出载体的
真航向。当基线长为 26 . 102 4 m 时,其航向校准
下载后可阅读完整内容,剩余4页未读,立即下载
2021-09-08 上传
2021-09-08 上传
2021-09-07 上传
117 浏览量
2021-10-03 上传
2021-09-08 上传
2021-09-07 上传
2023-02-23 上传
2021-09-07 上传

weixin_38560768
- 粉丝: 5
- 资源: 895
 我的内容管理
展开
我的内容管理
展开







最新资源
- matlab编写函数,将davenport谱转换成时程函数脉动风-谐波叠加法-matlab
- 推演示
- 四星电子 USB驱动程序.zip
- cpp_SysListView32.rar
- Review-all-countries-of-the-world:该应用程序的主屏幕上显示了世界所有国家/地区的列表。当用户从列表中选择一个国家时,将向他显示与该国家接壤的所有国家
- eslint-plugin-mossop:我的个人eslint配置
- numeric-keyboard:数字键盘的简单集成
- 大学课程作业:留学生学籍系统
- nativescript-demo:演示
- DeOlhoNoENADE
- HMI编程软件-InoTouchEditorV1.51S.zip
- WebEx recorder and player.rar
- ComplexTop.7sqkrl9v5a.gargbc3
- 塔式网络:Rust的快速,无样板的Web框架
- tabview-scrollview-mapview:https:github.comNativeScriptNativeScriptissues3960
- Instabrand:Boxis.io-用于根据您的Instagram个人资料创建网站的服务
