基于ADRC的四旋翼姿态控制增强与实现
需积分: 0 172 浏览量
更新于2024-06-30
1
收藏 9.07MB DOCX 举报
本篇论文是黄瑞敏同学在2018年进行的本科生毕业设计(改革课题),其研究主题为“基于ADRC的四旋翼控制器设计与实现”。针对传统PID控制方法在四旋翼飞行器姿态控制中的局限性,作者提出了利用自抗扰控制技术——自动扰动拒绝控制(AutoDisturbancesRejectionControl,简称ADRC)来提升系统的鲁棒性和稳定性。
ADRC的核心包括三个关键组件:微分跟踪器TD(Tracking Differentiator),扩张状态观测器ESO(Extended State Observer),以及非线性误差反馈控制律NLSEF(Nonlinear State Error Feedback)。微分跟踪器通过直接估计系统的状态变化,增强系统的动态响应;扩张状态观测器用于实时估计系统的未测量状态,提供更精确的状态信息;非线性误差反馈则确保了控制策略对系统模型的不准确性的抵抗能力。
作者将ADRC的数学模型转化为C语言实现,并将其封装为可移植到小型嵌入式系统的函数,以便在硬件上有效运行。论文中展示了通过Simulink仿真验证了ADRC在TD、ESO和NLSEF部分的性能,以及整体控制策略在模拟环境中的理想控制效果。
姿态数据的获取是控制过程中的重要环节,论文详细阐述了如何从实际飞行器中获取可靠的姿态信息,这为ADRC的实施提供了基础。最后,作者将ADRC应用于小型四旋翼飞行器的姿态控制中,设计并实现了基于STM32微处理器的外围电路,通过定时器中断技术实现了多任务处理,从而实现在实际硬件上的高效控制。
关键词集中在ADRC技术、姿态解算、姿态控制以及四旋翼飞行器应用上,反映出本文的研究重点在于解决实际飞行器控制中的复杂动态问题,提高飞行器在各种扰动下的稳定性和精度。这篇论文不仅理论研究了ADRC在四旋翼领域的可行性,还展示了其实现过程和应用效果,具有较高的实用价值。
基于 ADRC 的四旋翼控制器设计与实现
5
非
线
性
组
合
v
v1
安排过
度过程
e1
e2
v2
扩
张
状
态
观
测
器
对象
u0
b0
y
1/b0
+
-
+
-
+
-
u
z1
z2
z3
TD
ESO
NLSEF
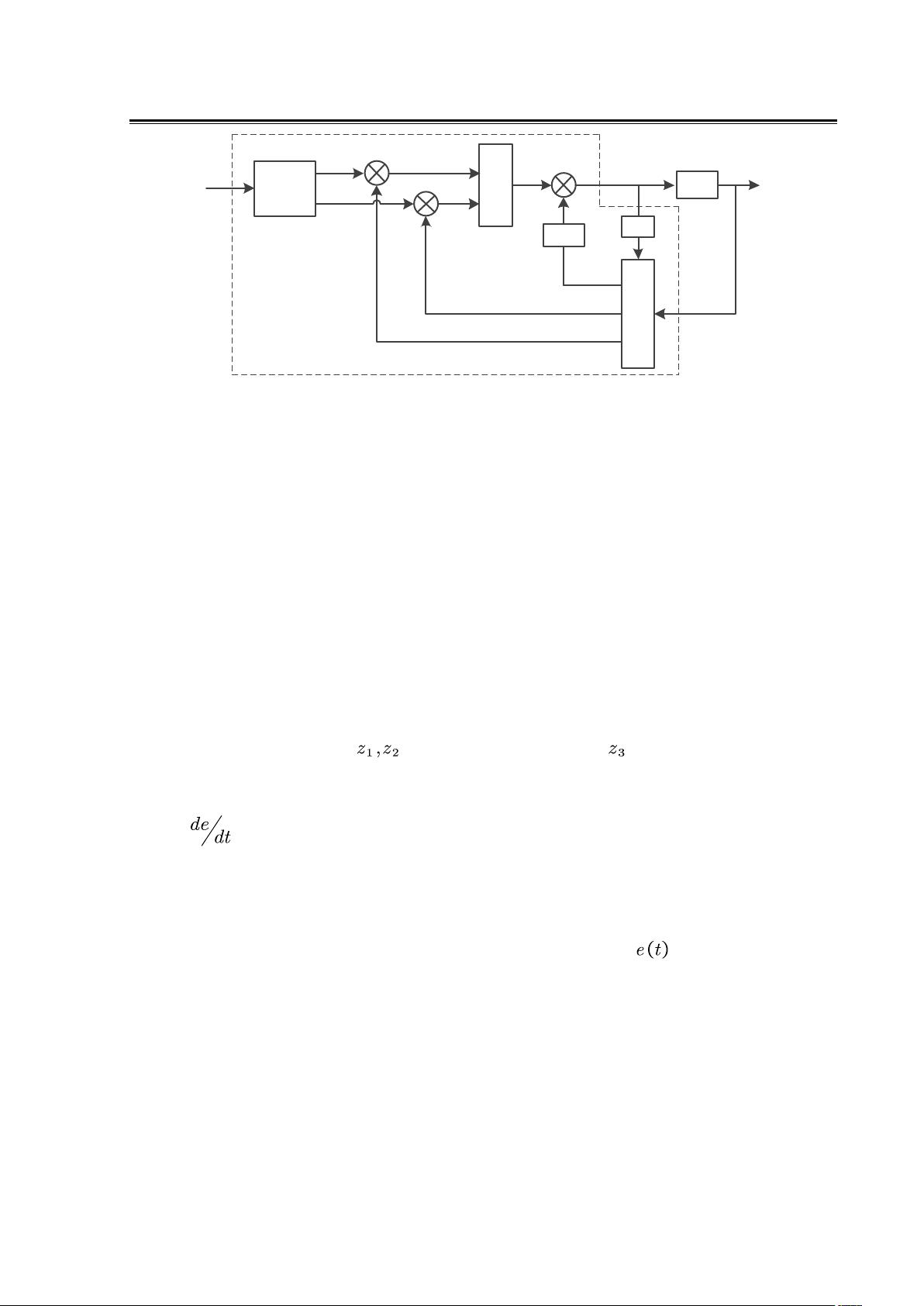
图 2.2 自抗扰控制器结构图
图 2.2 中虚线框部分的内容为自抗扰控制器,由图可看出,自抗扰控制器主要由跟踪微
分器 TD、非线性误差反馈律 NLSEF、扩展状态观测器 ESO 组成
[3][6]
。
自抗扰控制由 PID 控制发展而来,在 PID 控制器中,输出的控制量是由控制系统期
望状态和实际状态的误差的比例,积分,微分组成。比例项直接将误差乘以比例增益,
比例项输出与系统偏差属于线性关系,在自抗扰控制中,则通过非线性组合 NLSEF 将
系统的状态偏差与系统的微分状态偏差进行非线性组合,替换原来的比例控制;在 PID
控制器中,积分项用来消除系统的静态误差,在自抗扰控制中,扩张状态观测器 ESO
取代了积分项,能够较好地观测系统长时间的状态,并根据系统输入输出的状态关系,
给出对象状态变量的估计值 ,以及系统的扰动量估计 。在 PID 器中,微分项观
测了系统的变化趋势,以便形成阻尼,减少系统震荡,但是由于没有合适的微分器,微
分信号 常常无法正常获取,限制了 PID 控制的能力,因此,在自抗扰控制中,使
用微分跟踪器 TD 结合期望目标值以及被控制对象的承受能力,为控制系统安排好过度
过程,并给出了此过程的微分值,采用微分跟踪器 TD 以获取系统的变化趋势,当系统
输出较大的期望信号时,为系统安排过度过程,避免误差函数 出现阶跃函数
[3][4]
。
2.2 自抗扰控制结构及分析
2.2.1 跟踪微分器 TD
PID 控制项中的微分项无法合理地从被噪声污染的信号中提取出微分信号,然而,
二阶及高阶微分可克服噪声的放大效应,并能从颤震的数字信号中尽可能合理地提取出

剩余59页未读,继续阅读
2016-07-14 上传
2022-06-22 上传
2022-06-06 上传
2022-05-30 上传
2019-08-09 上传
2021-08-13 上传
2024-02-27 上传
点击了解资源详情

易烫YCC
- 粉丝: 30
- 资源: 315
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
