KITTI数据集:自动驾驶与机器人视觉研究的里程碑
需积分: 0 34 浏览量
更新于2024-08-05
收藏 2.95MB PDF 举报
"KITTI数据库介绍1" 是一篇针对移动机器人和自动驾驶领域的重要论文,由Andreas Geiger、Philip Lenz、Christoph Stiller 和 Raquel Urtasun合作编写。该研究的核心焦点是介绍一个名为KITTI(Klann Institute for Technology and Information)的新数据集,它旨在推动计算机视觉与机器人技术的融合。
KITTI数据集的特点在于其丰富的多模态传感器数据,包括高分辨率彩色和灰度立体相机、Velodyne 3D激光雷达以及精确的GPS/IMU(全球定位系统/惯性测量单元)导航系统。这些传感器在6小时的交通场景中持续工作,频率高达每秒10到100次,捕捉到了真实世界的交通环境,涵盖高速公路、乡村地区和密集的城市街道等各种复杂场景。数据集不仅包含经过校准、同步并带有时间戳的图像序列,还提供了经过处理的正则化图像以及原始数据。
更重要的是,数据集中的对象被标记为三维跟踪片段,这为后续的研究提供了丰富的训练和测试素材。论文提供了一系列在线基准测试,涵盖了立体视觉、光流估计、物体检测等任务,以便研究人员能够量化和比较不同算法的性能。这些基准测试对于评估和改进自动驾驶系统的实时感知和决策能力至关重要。
KITTI数据集不仅仅是一个数据集,它是一个完整的平台,包括了数据采集、处理、标注和评估流程,为计算机视觉、机器学习和自动驾驶技术的发展提供了宝贵的研究资源。它的存在极大地推动了学术界和工业界在这两个领域的研究进步,为实现智能驾驶的实际应用奠定了坚实的基础。
1
Vision meets Robotics: The KITTI Dataset
Andreas Geiger, Philip Lenz, Christoph Stiller and Raquel Urtasun
Abstract—We present a novel dataset captured from a VW
station wagon for use in mobile robotics and autonomous driving
research. In total, we recorded 6 hours of traffic scenarios at
10-100 Hz using a variety of sensor modalities such as high-
resolution color and grayscale stereo cameras, a Velodyne 3D
laser scanner and a high-precision GPS/IMU inertial navigation
system. The scenarios are diverse, capturing real-world traffic
situations and range from freeways over rural areas to inner-
city scenes with many static and dynamic objects. Our data is
calibrated, synchronized and timestamped, and we provide the
rectified and raw image sequences. Our dataset also contains
object labels in the form of 3D tracklets and we provide online
benchmarks for stereo, optical flow, object detection and other
tasks. This paper describes our recording platform, the data
format and the utilities that we provide.
Index Terms—dataset, autonomous driving, mobile robotics,
field robotics, computer vision, cameras, laser, GPS, benchmarks,
stereo, optical flow, SLAM, object detection, tracking, KITTI
I. INTRODUCTION
The KITTI dataset has been recorded from a moving plat-
form (Fig. 1) while driving in and around Karlsruhe, Germany
(Fig. 2). It includes camera images, laser scans, high-precision
GPS measurements and IMU accelerations from a combined
GPS/IMU system. The main purpose of this dataset is to
push forward the development of computer vision and robotic
algorithms targeted to autonomous driving [1]–[7]. While our
introductory paper [8] mainly focuses on the benchmarks,
their creation and use for evaluating state-of-the-art computer
vision methods, here we complement this information by
providing technical details on the raw data itself. We give
precise instructions on how to access the data and comment
on sensor limitations and common pitfalls. The dataset can
be downloaded from http://www.cvlibs.net/datasets/kitti. For
a review on related work, we refer the reader to [8].
II. SENSOR SETUP
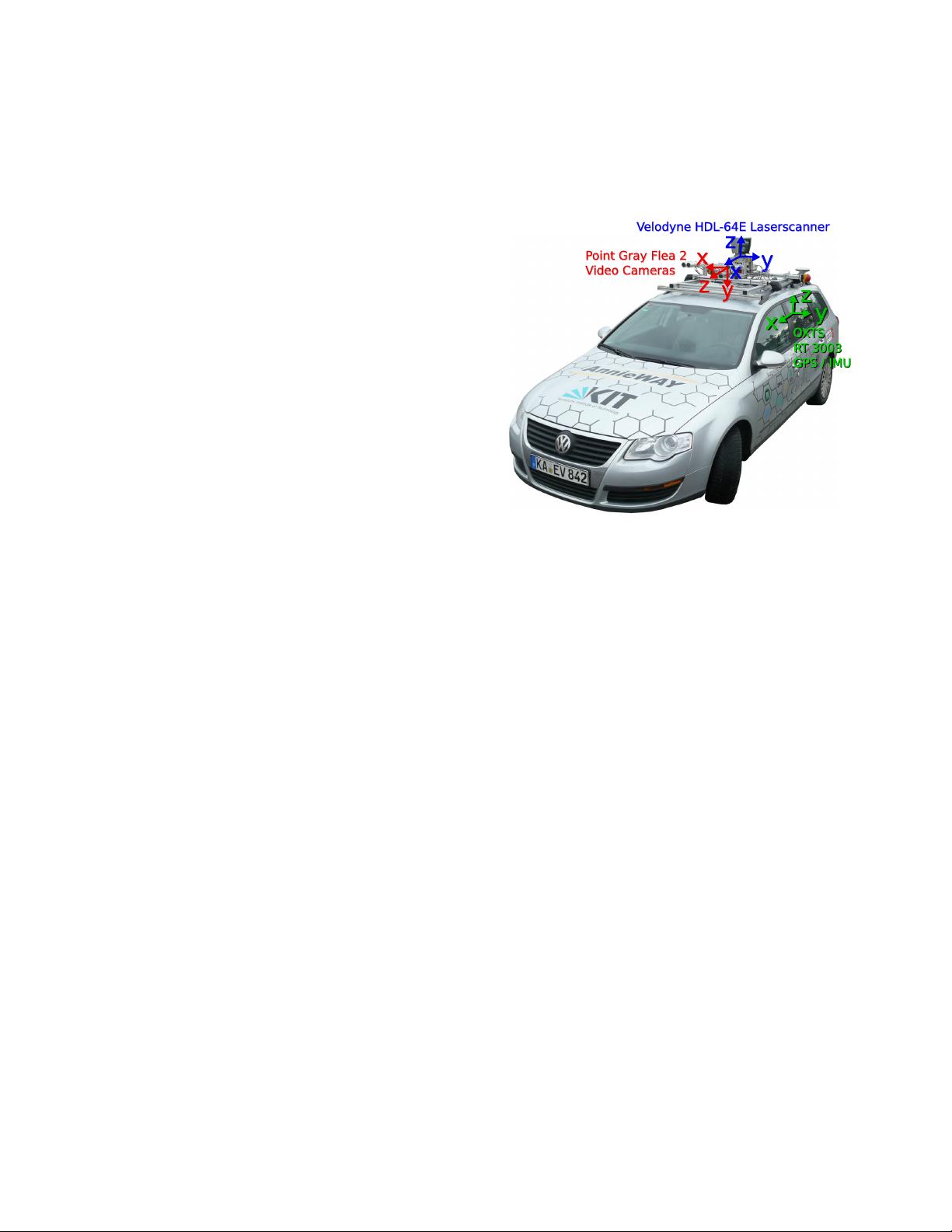
Our sensor setup is illustrated in Fig. 3:
• 2 × PointGray Flea2 grayscale cameras (FL2-14S3M-C),
1.4 Megapixels, 1/2” Sony ICX267 CCD, global shutter
• 2 × PointGray Flea2 color cameras (FL2-14S3C-C), 1.4
Megapixels, 1/2” Sony ICX267 CCD, global shutter
• 4 × Edmund Optics lenses, 4mm, opening angle ∼ 90
◦
,
vertical opening angle of region of interest (ROI) ∼ 35
◦
• 1 × Velodyne HDL-64E rotating 3D laser scanner, 10 Hz,
64 beams, 0.09 degree angular resolution, 2 cm distance
accuracy, collecting ∼ 1.3 million points/second, field of
view: 360
◦
horizontal, 26.8
◦
vertical, range: 120 m
A. Geiger, P. Lenz and C. Stiller are with the Department of Measurement
and Control Systems, Karlsruhe Institute of Technology, Germany. Email:
{geiger,lenz,stiller}@kit.edu
R. Urtasun is with the Toyota Technological Institute at Chicago, USA.
Email: rurtasun@ttic.edu
x
z
y
y
z
x
Velodyne HDL-64E Laserscanner
Point Gray Flea 2
Video Cameras
x
y
z
OXTS
RT 3003
GPS / IMU
x
y
z
OXTS
RT 3003
GPS / IMU
Fig. 1. Recording Platform. Our VW Passat station wagon is equipped
with four video cameras (two color and two grayscale cameras), a rotating
3D laser scanner and a combined GPS/IMU inertial navigation system.
• 1 × OXTS RT3003 inertial and GPS navigation system,
6 axis, 100 Hz, L1/L2 RTK, resolution: 0.02m / 0.1
◦
Note that the color cameras lack in terms of resolution due
to the Bayer pattern interpolation process and are less sensitive
to light. This is the reason why we use two stereo camera
rigs, one for grayscale and one for color. The baseline of
both stereo camera rigs is approximately 54 cm. The trunk
of our vehicle houses a PC with two six-core Intel XEON
X5650 processors and a shock-absorbed RAID 5 hard disk
storage with a capacity of 4 Terabytes. Our computer runs
Ubuntu Linux (64 bit) and a real-time database [9] to store
the incoming data streams.
III. DATASET
The raw data described in this paper can be accessed from
http://www.cvlibs.net/datasets/kitti and contains ∼ 25% of our
overall recordings. The reason for this is that primarily data
with 3D tracklet annotations has been put online, though we
will make more data available upon request. Furthermore, we
have removed all sequences which are part of our benchmark
test sets. The raw data set is divided into the categories ’Road’,
’City’, ’Residential’, ’Campus’ and ’Person’. Example frames
are illustrated in Fig. 5. For each sequence, we provide the raw
data, object annotations in form of 3D bounding box tracklets
and a calibration file, as illustrated in Fig. 4. Our recordings
have taken place on the 26th, 28th, 29th, 30th of September
and on the 3rd of October 2011 during daytime. The total size
of the provided data is 180 GB.
下载后可阅读完整内容,剩余5页未读,立即下载
2021-03-23 上传
2018-08-10 上传
2021-05-22 上传
2023-10-13 上传
2022-08-08 上传
2023-04-26 上传
2023-05-10 上传

奔跑的楠子
- 粉丝: 31
- 资源: 299
 我的内容管理
展开
我的内容管理
展开







最新资源
- AA4MM开源软件:多建模与模拟耦合工具介绍
- Swagger实时生成器的探索与应用
- Swagger UI:Trunkit API 文档生成与交互指南
- 粉红色留言表单网页模板,简洁美观的HTML模板下载
- OWIN中间件集成BioID OAuth 2.0客户端指南
- 响应式黑色博客CSS模板及前端源码介绍
- Eclipse下使用AVR Dragon调试Arduino Uno ATmega328P项目
- UrlPerf-开源:简明性能测试器
- ConEmuPack 190623:Windows下的Linux Terminator式分屏工具
- 安卓系统工具:易语言开发的卸载预装软件工具更新
- Node.js 示例库:概念证明、测试与演示
- Wi-Fi红外发射器:NodeMCU版Alexa控制与实时反馈
- 易语言实现高效大文件字符串替换方法
- MATLAB光学仿真分析:波的干涉现象深入研究
- stdError中间件:简化服务器错误处理的工具
- Ruby环境下的Dynamiq客户端使用指南
