机器人学入门:力学与控制探索
需积分: 10 193 浏览量
更新于2024-07-24
收藏 15.44MB PDF 举报
"Introduction to Robotics Mechanics and Control"
这本书的标题是"Introduction to Robotics Mechanics and Control",这是一本关于机器人的英文书籍,涵盖了机器人学的基础知识,包括机械原理和控制技术。作者通过与专家John J. Craig的对话,揭示了进入机器人行业的路径以及这一领域的吸引力。
在描述中,作者Peter I. Corke提到了他如何被机器人吸引,并决定将其作为职业生涯的起点。他的哥哥在高中时期制作了一个简单的机器人,这个经历激发了他对机器人的兴趣。在11年级时,他自己设计了一个拥有四个自由度(DoF)的机械臂机器人,还配备了光敏细胞作为“眼睛”和录音机,使机器人能够说话。然而,在大学期间,他暂时放下了对机器人的热情,认为在现实世界中以机器人技术为生可能并不实际。但五年后,当他发现机器人在制造业中变得越来越普遍时,他决定投身于机器人领域。
从标签"Robotics Mechanics and Control"可以推断,这本书将深入探讨机械设计、动力学、运动学和控制系统等主题。这些是构建和控制机器人所必需的基本概念。机械部分可能涉及关节设计、传动机制和结构稳定性;控制部分则可能涵盖PID控制器、轨迹规划、传感器融合以及机器人操作系统(ROS)的基础知识。
在部分内容中,虽然没有直接提供具体的技术细节,但我们可以推测书中会讨论到如何从个人爱好发展成为专业领域,以及教育背景如何为进入机器人行业做准备。John J. Craig提到他去RP(可能是Rensselaer Polytechnic Institute,一所知名的工程学院)学习,并专注于与机器人相关的领域。
"Introduction to Robotics Mechanics and Control"这本书将为读者提供一个全面的视角,从基础理论到实际应用,深入理解机器人学的各个方面,包括机械设计和控制系统的设计,同时也分享了专业人士如何进入并在这个快速发展领域的职业经验。对于那些对机器人技术感兴趣,无论是为了学术研究还是职业发展,这本书都是一个宝贵的资源。
Section 1.2
The mechanics
and
control of mechanical
manipulators
7
joint space to Cartesian space is needed. These days, however, it is rare to find an
industrial
robot
that
lacks this basic inverse kinematic algorithm.
The inverse kinematics problem is
not
as simple as the forward kinematics
one. Because the kinematic equations are nonlinear, their solution is
not
always
easy (or even possible) in a closed form. Also, questions about the existence of a
solution and about multiple solutions arise.
Study of these issues gives one an appreciation for what the human mind and
nervous system are accomplishing when we, seemingly without conscious thought,
move and manipulate objects with our arms and hands.
The existence or nonexistence of a kinematic solution defines the
workspace
of a given manipulator. The lack of a solution means that the manipulator cannot
attainthe desired position and orientationbecauseit lies outside of the manipulator's
workspace.
Velocities, static forces, singularities
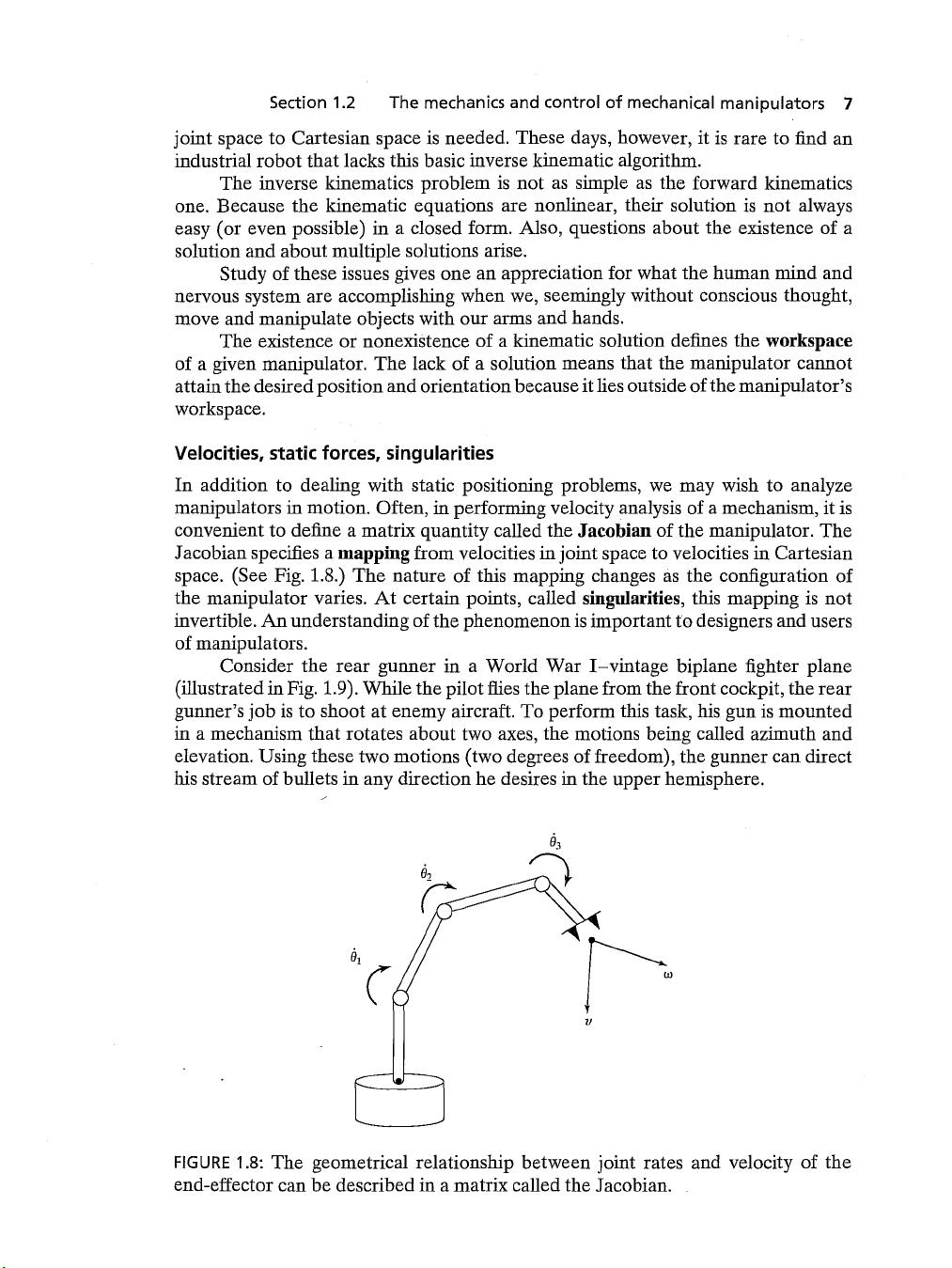
In addition to dealing with static positioning problems, we may wish to analyze
manipulators in motion. Often, in performing velocity analysis of a mechanism, it is
convenient to define a matrix quantity called the
Jacobian of the manipulator. The
Jacobian specifies a
mapping from velocities in joint space to velocities in Cartesian
space. (See Fig. 1.8.)
The
nature of this mapping changes as the configuration of
the manipulator varies.
At
certain points, called singularities, this mapping is
not
invertible.
An
understanding of the phenomenonis important to designers and users
of manipulators.
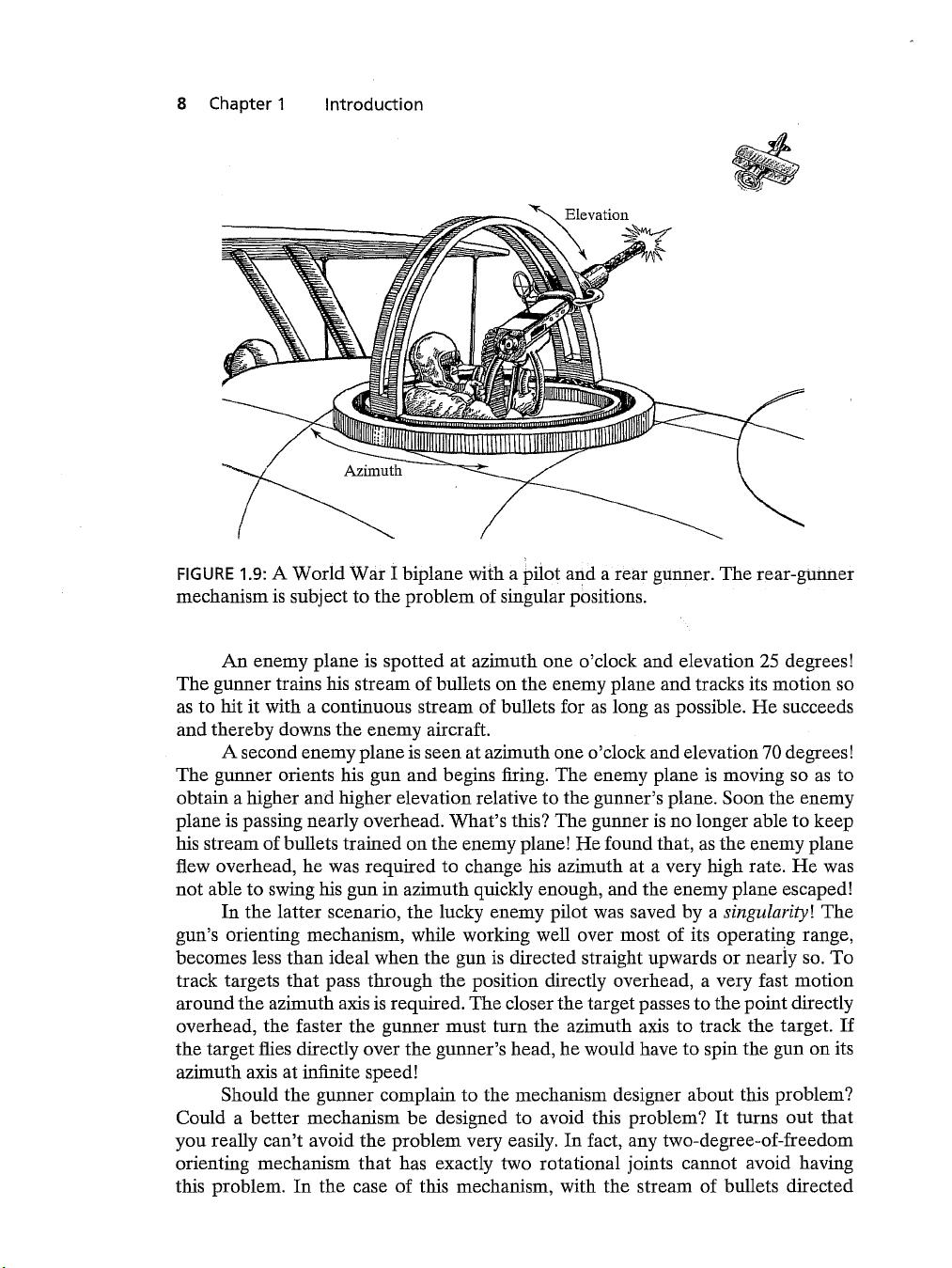
Consider the
rear
gunner in a World War
I-vintage
biplane fighter plane
(illustrated in Fig. 1.9). While the pilot flies the plane from the front cockpit, the
rear
gunner's
job
is to shoot at enemy aircraft. To perform this task, his gun is mounted
in a mechanism
that
rotates about two axes, the motions being called azimuth and
elevation. Using these two motions (two degrees of freedom), the gunner can direct
his stream of bullets in any direction he desires in the upper hemisphere.
v
FIGURE
1.8: The geometrical relationship between joint rates and velocity of the
end-effector can be described in a matrix called the Jacobian.
剩余406页未读,继续阅读
317 浏览量
134 浏览量
点击了解资源详情
461 浏览量
147 浏览量
541 浏览量
1582 浏览量
354 浏览量
350 浏览量

mengmeng198902
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Homebridge Xbox电视插件:实现微软游戏机的HomeKit控制
- Code.js:打造前端开发中的语法高亮显示
- Java实现GDP经济地图可视化分析
- 解决Office 2003无法打开Office 2007文件的问题
- 使用Python实现K-Means进行文本聚类分析
- CentOS虚拟机模板使用指南及开源项目介绍
- Java实现的飞行模拟游戏项目
- 深入探究Windows 32位API的查询与应用
- 全面破解:U盘PE系统维护与分区工具教程
- Firefox OS NFC应用开发与远程内容加载实践
- Dart软件包管理器Pub的贡献指南与组织架构
- Spy4win8在Windows 8上的完美兼容性验证
- MySQL 5.7.16解压版:一键启动,简化数据库部署流程
- AMScrollingNavbar:Objective-C实现可滚动的UINavigationBar
- MYSQL培训经典教程 - 易学好用的数据库教程
- 探索CityGen道路插件:增强草图大师的道路生成功能
