S7-200SMART运动向导:简化编程的组态指南
需积分: 50 35 浏览量
更新于2024-07-16
收藏 3.84MB PDF 举报
西门子S7-200SMART运动向导组态是针对S7-200系列在运动控制方面的显著改进,旨在提升用户界面和编程效率。在S7-200SMART中,原版运动控制功能存在编程复杂、频率较低的问题。为了简化这一过程,西门子引入了运动向导功能,它提供了一种直观的向导式组态方法。
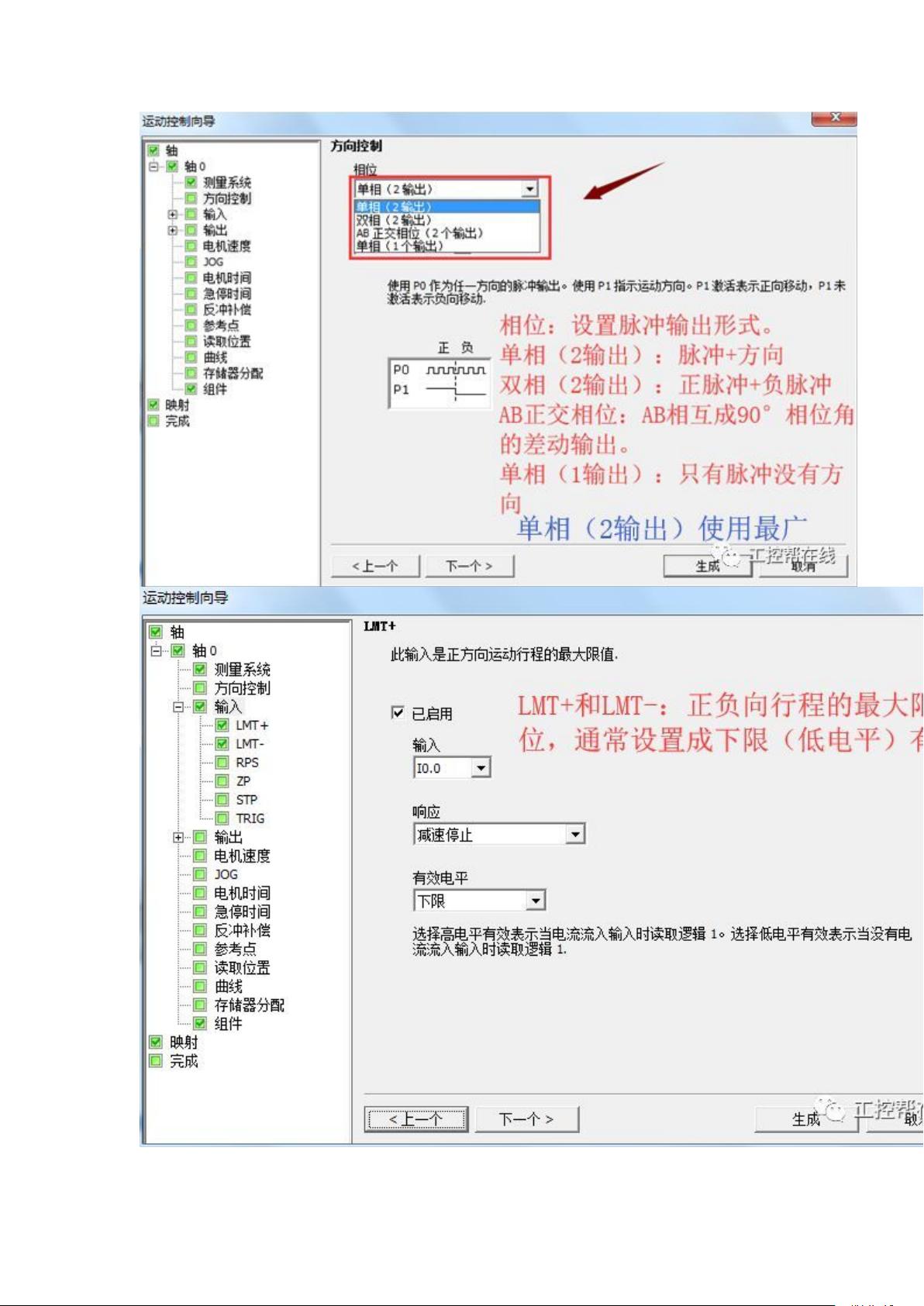
在运动向导组态过程中,用户首先会在项目树中选择“向导>运动”选项。这个向导会引导用户设置关键的运动参数,如工程单位。选择不同的工程单位有不同的处理方式:如果选择浮点数模式,距离和速度会被自动转换为脉冲数和脉冲频率,虽然操作简便,但余数处理可能不那么灵活;相对脉冲模式则需要用户自行计算,设定值为双整数,虽然编程稍显复杂,但能够实现更精细的余数控制。
向导组态完成后,系统会自动生成一系列运动相关的子程序,如AXIS0_CTRL用于运动轴初始化,AXIS0_MAN执行手动操作,AXIS0_GOTO用于单段定位,有绝对和相对两种选择,适合不同的运动需求。AXIS0_RUN负责多段定量曲线运动,而AXIS0_RSEEK则是搜寻参考点的子例程,可以根据预先设定的速度和模式进行搜索。AXIS0_LDPOS允许修改当前位置,创建虚拟参考点,AXIS0_SRATE则用于调整加减速和急停时间,确保运动过程的平滑性。最后,AXIS0_CFG子例程用于重新加载组态,当用户修改向导数据块中的参数后,必须通过此功能进行刷新,以确保配置变更的实时生效。
尽管文中提到的部分子例程在实际项目中可能使用较少,但整体来看,S7-200SMART的运动向导组态为用户提供了高效、便捷的编程环境,极大地提升了运动控制任务的编程效率,减少了出错可能性。这对于工业自动化领域的工程师来说,无疑是一个重要的进步。通过理解和掌握这些子例程,用户可以更快速地构建和调整复杂的运动控制逻辑,从而提高生产效率和产品质量。
剩余19页未读,继续阅读
539 浏览量
425 浏览量
245 浏览量
135 浏览量
223 浏览量
257 浏览量

weixin_38285315
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







