MSP430单片机驱动的灭火机器人设计与实现
版权申诉
187 浏览量
更新于2024-06-23
收藏 8.09MB DOC 举报
"基于MSP430的灭火机器人小车制作"
本文档详细介绍了如何制作一个基于MSP430微控制器的灭火机器人小车。该小车旨在模拟实际环境中的火灾救援,通过自动化控制技术寻找并熄灭火源。整个项目涵盖了从硬件设计到软件开发的全过程。
首先,文档阐述了课题背景,强调了随着自动控制技术的进步,单片机在各领域的广泛应用,特别是在工业自动化、家用电器等领域的关键角色。MSP430系列单片机因其低功耗、高性能的特点,成为设计这类智能机器人的理想选择。它支持C语言编程,简化了程序设计,提高了代码效率。
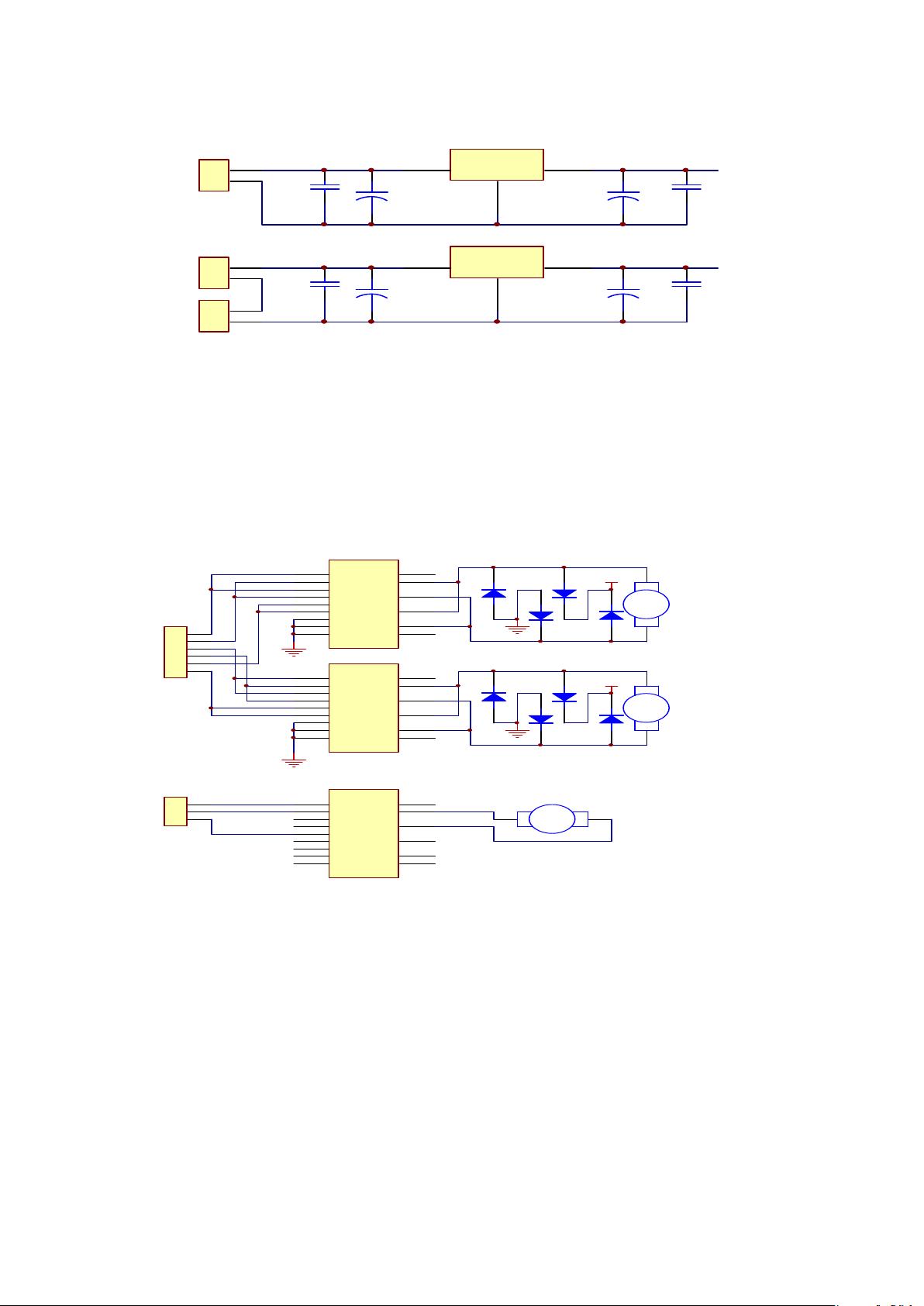
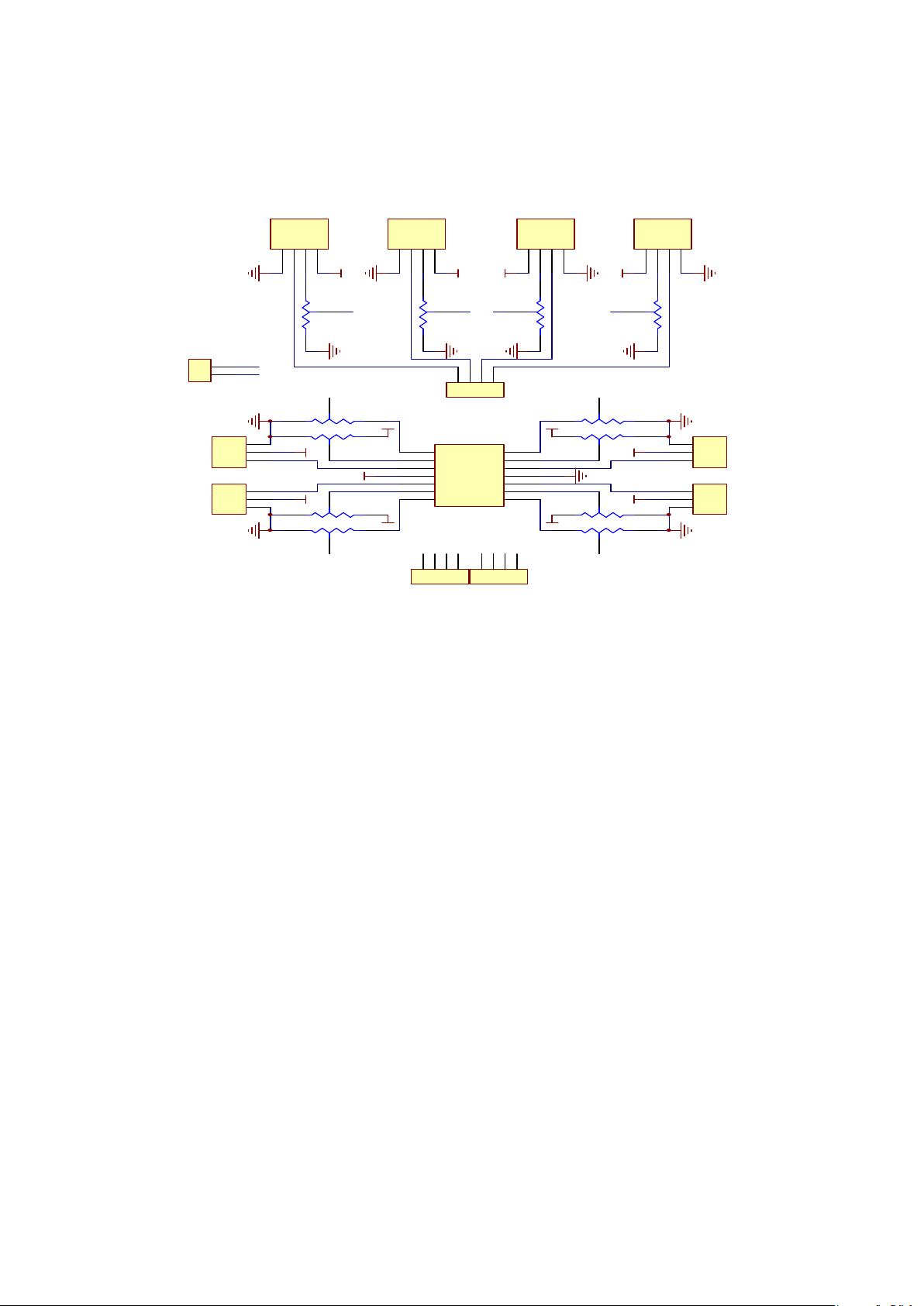
硬件设计部分,主要围绕MSP430F149单片机展开,这是一种由美国德州仪器(TI)生产的超低功耗微控制器。设计中还包含了各种传感器,如HS0038用于碰撞检测,ST1885用于地面灰度检测,SHARPGP2D126用于左右碰撞检测,这些传感器确保机器人能够感知周围环境。此外,L298N作为电机驱动芯片负责控制小车的移动,LM7805CV和LM7812CV用于电源管理,LM358作为运算放大器,火焰传感器则用于识别火源位置。所有这些组件共同构建了一个能探测、定位和响应火源的智能系统。
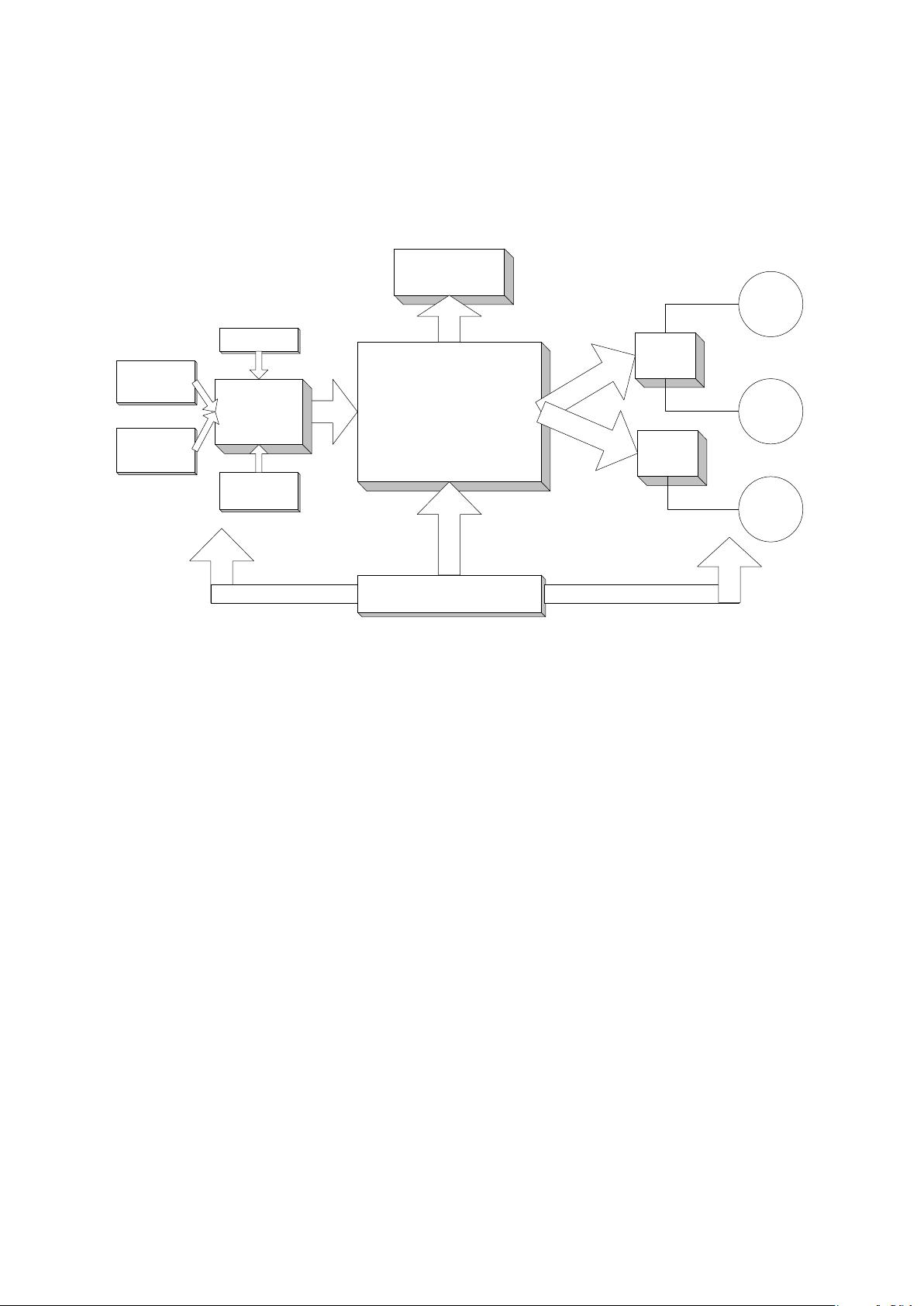
系统设计部分详细讨论了整体架构和各个模块的硬件与软件设计。硬件设计包括了传感器的连接、电机控制和电源分配等。软件设计则涉及到单片机的程序编写,可能包括了路径规划算法、传感器数据处理以及控制逻辑等。
调试记录部分记录了在开发过程中遇到的问题和解决方案,这是学习和改进的重要环节。实验心得则分享了作者在项目实施过程中的感悟和经验,对其他类似项目具有借鉴价值。
附录中提供了程序清单、硬件设计电路图、参考文献以及灭火小车和比赛场地的详细信息,为读者提供了完整的参考资料。
这个项目不仅展示了基于MSP430的机器人系统的构建,还体现了单片机在自动化控制中的强大能力,以及如何综合运用多种传感器和控制技术来解决实际问题。对于学习嵌入式系统设计、机器人技术以及自动化控制的学生和爱好者来说,这是一个非常有价值的实践案例。

2.8 火焰传感器
2.8.1 火焰传感器实物图
图 2-13 火焰传感器实物图
2.8.2 火焰传感器功能
此传感器本品可广泛应用于灭火机器人比赛中测量火焰值、足球比赛时,用于确定足
球的方向。
2.8.3 火焰传感器使用
此传感器具有优良的火焰探测性能,可根据可见光、红外光强弱变化输出电平的大小。
其输出端口是一个四针的插头,其中黑色线为地线、红色线为电源线(+5V)、黄色线为信
号线,用于输出测量的红外光强度电平、棕色线为信号线,用于输出可见光强度电平。
剩余81页未读,继续阅读
2023-06-03 上传
2019-05-22 上传
2022-04-29 上传
2022-09-15 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
