PCL室内点云处理:提取复杂房间框架与参数
184 浏览量
更新于2024-07-15
收藏 453KB PDF 举报
PCL(Point Cloud Library)是一种广泛用于3D点云处理的开源库,本文介绍了一种利用PCL技术通过室内点云生成房间框架的方法。之前的工作已经实现了基于PCL的房间参数估计,但该算法在处理复杂房间时存在局限性,因为原始的RGBD设备扫描可能会引入较大的误差。
在这个改进版本中,首先,原始点云数据通过RGBD设备获取,扫描质量不高导致点云精度有限。针对这个问题,程序设计包含两个关键部分:C++程序PointCloud.exe和Python脚本wall_dis.py。当用户通过Python脚本运行,传入包含点云数据的PCD文件(如.\5.pcd)时,整个流程开始。
1. **数据预处理**:
- Python脚本首先检查输入的点云文件路径,如果文件格式不是PCD,会尝试使用第三方工具(pcl_mesh_sampling_release)将其转换为点云。
2. **平面分割与特征提取**:
- C++程序PointCloud.exe执行平面分割,根据点云中的数据,将房间分割成15个平面,并生成临时文件temp.txt。文件内容包含了整个点云的重心、15个平面的参数(可能包括法线方向、距离等)以及每个平面的重心信息。
3. **墙面分类与清理**:
- Python脚本读取temp.txt,根据平面的角度对墙面进行分类。接着,对每个分类进行进一步处理,去除过于靠近或重叠的平面,提高框架的准确性和完整性。
4. **提取房间框架参数**:
- 通过上述步骤,最终提取出房间的关键参数,包括:
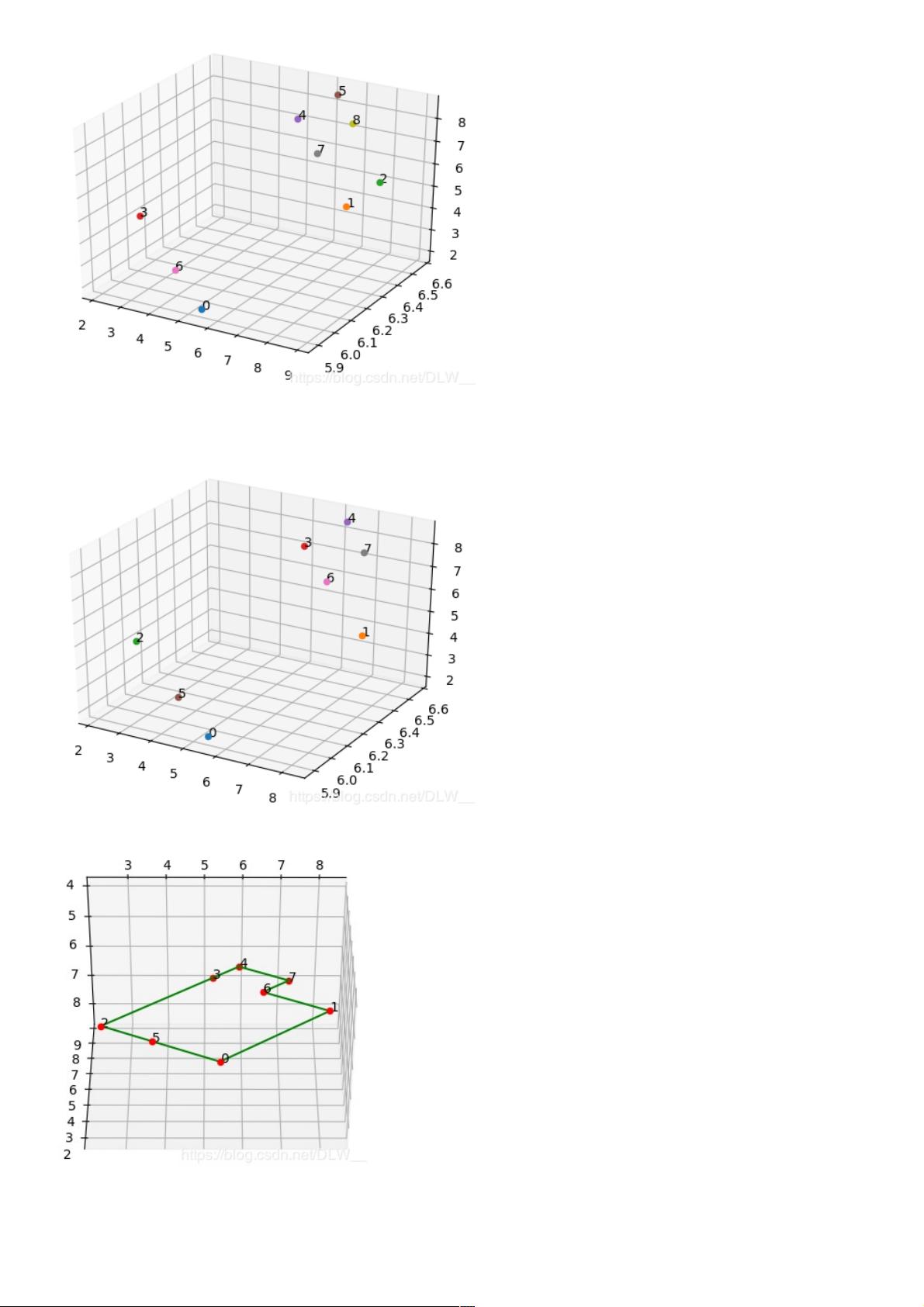
- 角点坐标:一组表示房间边缘转折点的三维坐标,如[[5.40791146, 6.01982222, 1.85338407, 0., 3.], ...]。
- 闭合路线:描述房间边界上的点序,如[0, 1, 6, 7, 4, 3, 2, 5]。
- 路线长度:各部分路线的长度,有助于理解房间的形状。
- 高度:房间的平均高度,即3.3328831615131667米。
5. **限制与挑战**:
- 该方法对于复杂房间可能仍存在挑战,因为原始点云的质量直接影响到框架提取的准确性。未来可能需要结合更高级的点云处理技术和深度学习算法来提高算法的鲁棒性。
这篇文章详细介绍了如何使用PCL进行室内点云分析,通过多步骤处理来生成房间框架,包括数据预处理、平面分割和特征选择,以适应不同复杂度的室内环境。然而,随着场景复杂性的增加,继续优化算法以减少误差和提高精度仍然是研究的重点。
再次调用PointCloud.exe读取temp.txt对每个交点计算半径0.7m内的点云数目,并写回temp.txt.
读取temp.txt根据交点周围点云数目过滤掉错误交点.
使用深度优先搜索算法计算交点的闭合路径,并输出路径和路线长度等信息.
闭合路线: [0, 1, 6, 7, 4, 3, 2, 5] 路线长度: [4.655092848984463, 2.1871104392584755, 1.1464118939973418, 1.6752747849874787,
1.1464118939973411, 4.655092848984463, 1.6752747849874785, 2.187110439258477] 高: 3.3328831615131667
使用底面参数和高,画出房间框架.
剩余14页未读,继续阅读
202 浏览量
281 浏览量
205 浏览量
465 浏览量
174 浏览量
2025-02-25 上传

weixin_38564718
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- HaneWin DHCP Server 3.0.34:全面支持DHCP/BOOTP的服务器软件
- 深度解析Spring 3.x企业级开发实战技巧
- Android平台录音上传下载与服务端交互完整教程
- Java教室预约系统:刷卡签到与角色管理
- 张金玉的个人简历网站设计与实现
- jiujie:探索Android项目的基础框架与开发工具
- 提升XP系统性能:4G内存支持插件详解
- 自托管笔记应用Notes:轻松跟踪与搜索笔记
- FPGA与SDRAM交互技术:详解读写操作及代码分享
- 掌握MAC加密算法,保障银行卡交易安全
- 深入理解MyBatis-Plus框架学习指南
- React-MapboxGLJS封装:打造WebGL矢量地图库
- 开源LibppGam库:质子-伽马射线截面函数参数化实现
- Wa的简单画廊应用程序:Wagtail扩展的图片库管理
- 全面支持Win7/Win8的MAC地址修改工具
- 木石百度图片采集器:深度采集与预览功能
