MIMO非线性时变系统自适应控制:噪声干扰下的泰勒网方法
11 浏览量
更新于2024-08-30
1
收藏 756KB PDF 举报
"一种具有噪声干扰的MIMO非线性时变系统自适应控制"
本文针对含噪声的多输入多输出(MIMO)不确定非线性时变系统,提出了一种创新的自适应控制策略,该策略利用多维泰勒网络(MTN)来处理系统中的复杂非线性和噪声干扰问题。MTN是一种有效的数学工具,可以逼近非线性函数,从而在控制和滤波过程中发挥关键作用。
首先,文章介绍了一个多维泰勒网络控制器(MTNC),其目的是实现对系统状态的实时跟踪控制。MTNC的设计基于闭环误差,即滤波输出与期望值之间的差距,以此作为输入。为了应对系统中的不确定性,采用了自适应变步长算法,该算法基于稳定的學習率来快速调整MTNC的权重,以适应系统变化。
其次,为了消除测量噪声,文章提出了多维泰勒网络滤波器(MTNF)。MTNF的设计基于Lyapunov函数,确保了滤波器的稳定性和收敛性。MTNF与传统的基于Lyapunov理论的自适应滤波(LAF)相结合,利用MTN的特性来增强滤波性能,能够有效过滤掉测量数据中的噪声,从而使滤波器输出渐近收敛于期望信号。
文章通过理论分析证明了所提出的自适应控制方案和滤波器的收敛性和稳定性,并进行了仿真验证,结果显示该方案在应对噪声干扰和非线性时变系统中的性能优越。
这一研究对于MIMO非线性时变系统的控制问题提供了新的解决思路,尤其在存在噪声干扰的环境下,能够提升系统的控制精度和稳定性。对于实际应用,如自动化控制、航空航天、机器人等领域,该方法有望提高系统的整体性能。
参考文献:
1. 张超, 孙启鸣, 姜红. 一种具有噪声干扰的MIMO非线性时变系统自适应控制[J]. 控制与决策, 2020, 35(5): 1113-1122. (Online: https://doi.org/10.13195/j.kzyjc.2018.0928)
2. 带有非匹配扰动的连铸结晶器振动位移系统自适应反步滑模控制[其他文章链接]
3. 基于非线性干扰观测器的一类欠驱动系统跟踪控制[其他文章链接]
4. 一种无模型自适应积分终端滑模控制方法[其他文章链接]
5. 倾转式三旋翼无人飞行器抗扰非线性控制设计[其他文章链接]
6. 具有未建模动态和输出约束的耦合系统的分散自适应控制[其他文章链接]
1114 控 制 与 决 策 第35卷
及一般不适合高实时性应用场合
[2]
,都迫使工程师寻
求其他解决方案.
由于易于调整和结构简单, 无论是工业界还是
学术界, PID调节都是一个活跃的研究领域. 获取 PID
和类 PID 控制器参数的方法有: 增益相位裕度法
[3]
、
优化方法
[4]
、Ziegler-Nichol 方法
[5]
和基于内模控制
的方法
[6]
. 对于单输入单输出 (SISO) 系统, 使用已有
调节技术就可得到满意的控制效果. 然而, 实际应用
的大多数被控对象都是多输入多输出 (MIMO) 系统,
因此, 处理非线性 MIMO 问题具有重要意义, 而且由
于输入与输出变量之间存在耦合关系, 由 SISO 系统
推导的控制律不能直接扩展到 MIMO 系统. 此外, 在
MIMO系统中, PID参数数量将变得非常多
[7]
,试凑法
不足以在控制器性能与鲁棒性之间获得最佳折衷.
随着解决被控对象不确定性和复杂性的智能控
制技术的迅速发展,一些神经网络模型和神经网络训
练方案被应用于系统控制器的设计
[8]
. 例如, 作为前
馈控制器时, Plett
[9]
深入讨论了神经网络如何学习模
仿被控对象的逆. 然而,神经网络存在学习速度慢、泛
化能力弱的缺点,目前也没有系统化的方法来确定其
拓扑结构.
在工业应用中, 被控系统的参数通常是时变的,
因此, 经典 PID 和类 PID 控制方案在处理存在不确定
性因素的系统时就显得特别不灵活. 此外, 已有的一
些现代控制方案
[10]
的分析和设计过程复杂而困难,
要解决这些问题,设计的控制算法和结构应足够简单
且易于实现. 控制方案应包含非线性、鲁棒性、灵活
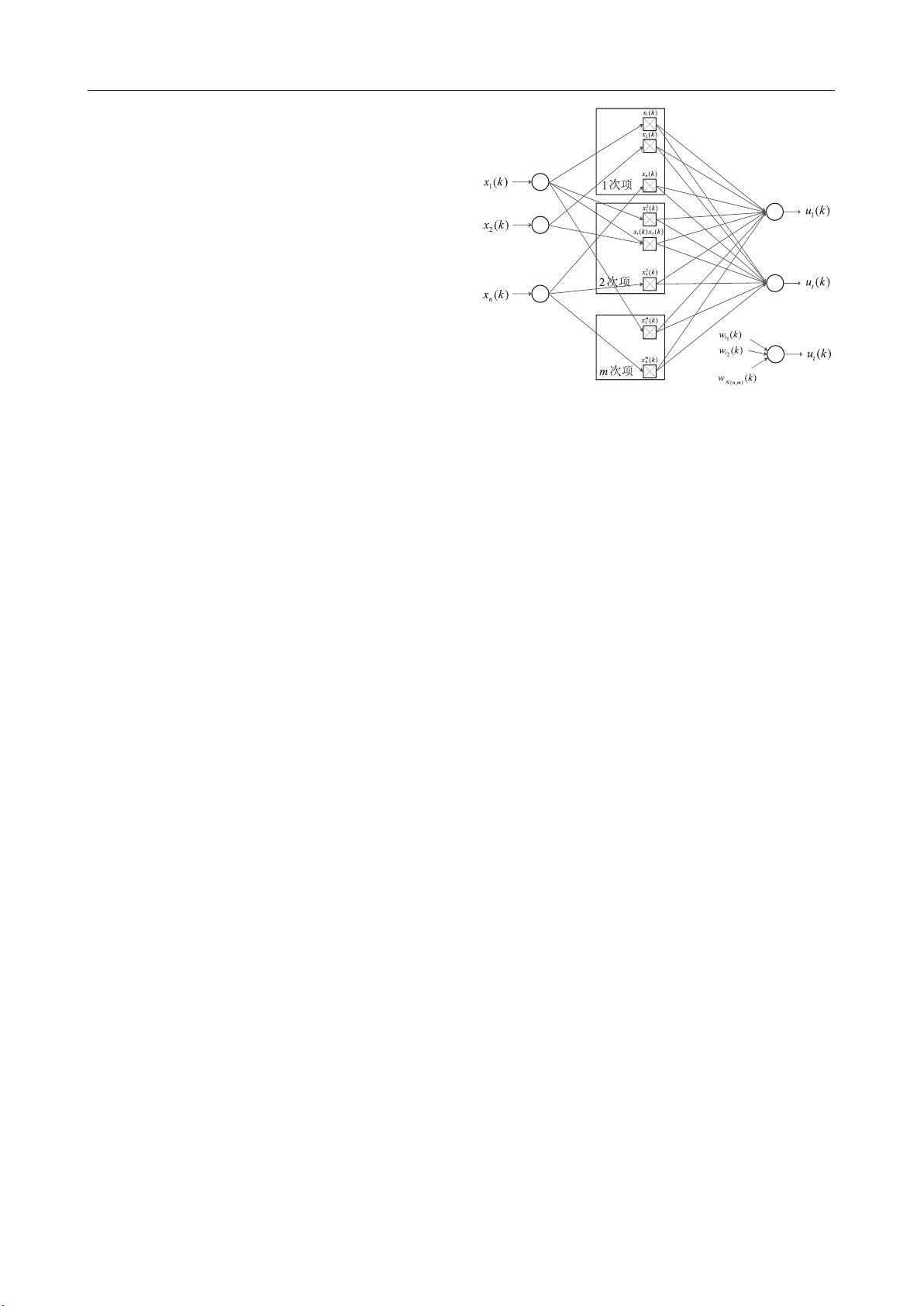
性和学习能力等特征. 基于此, 东南大学严洪森教授
课题组提出了多维泰勒网 (MTN) 及其最优控制方法,
模型如图 1所示. 它可以很好地代替传统神经网络进
行动态系统建模和控制,其本质上是多项式型的非线
性自回归滑动平均模型, 借助于抽头延迟映射来表
示动态系统. MTN 的多项式函数由一些线性项和非
线性项组成, 因此, 其可表示一般意义下的状态动力
学特性, 从而表征系统行为的显性描述. 目前,一些学
者正对该模型在模型预测
[11]
、系统辨识
[12]
、灾害预
测
[13]
、电机控制
[14]
以及非线性控制
[15]
等领域的应用
进行研究, 但该模型仅应用于 SISO 系统且未综合考
虑系统耦合、不确定性、时变特性及测量噪声等因素.
如果不做处理,对象噪声和随机干扰就会不受抑制地
出现在控制器的输入端, 这将大大降低自适应过程
的稳定性并严重影响控制精度. 自适应滤波已得到
普遍的发展
[16]
, 在各种非线性滤波器中, 神经网络的
应用最为广泛. 然而, 它们在参数上是高度非线性的.
...
i
...
...
...
...
...
...
图 1 多输入多输出多维泰勒网模型
参数调整可能被限制在梯度下降法优化准则的局部
最小值. MTN 的任意逼近性以及单个中间层节点的
线性加权组合的简单计算,使得其成为选取非线性滤
波器时的另一个参考项.
多维泰勒网滤波器 (MTNF) 权值可以通过最小
均方 (LMS)和递推最小二乘 (RLS)算法进行调整. 然
而, 这些算法存在局限性和缺点
[17-18]
. LMS 的收敛速
度高度依赖于与输入信号相关的自相关函数; RLS
虽能带来更快的收敛速度, 但其依赖于输入信号的
自相关矩阵逆的隐式或显式计算, 同时在时变环境
中也不能保证更好的跟踪能力. 为了克服上述困难,
文献 [19] 提出了基于 Lyapunov 理论的自适应 SISO
滤波 (LAF), 并已 应用 于噪 声控 制. 由 于定 义了 滤
波器输出与期望信号之间误差的 Lyapunov 函数, 再
根据 Lyapunov 稳定性理论自适应调整滤波器的权
值, 可使误差渐近收敛到零. 为 LAF 滤波器选取的
Lyapunov 函数在状态空间中具有唯一的全局最小
值. 然而, MIMO系统的LAF滤波器尚待研究.
综上所述, 本文构建基于 MTN 的自适应控制方
案, 其中多维泰勒网控制器 (MTNC)和 MTNF 分别作
为优化控制器和非线性滤波器.
1 问题描述
考虑 MIMO 非线性时变离散系统, 可用输入输
出差分方程表示为
y(k + 1) = f (y(k), y(k − 1), . . . , y(k − d
y
),
u(k), u(k − 1), . . . , u(k − d
u
), k). (1)
其中: f (·) 为非线性向量函数; y(k) = [y
1
(k), y
2
(k),
. . . , y
j
(k), . . . , y
s
(k)]
T
∈ R
s
为系统输出向量, s 表示
输出的数量, j = 1, 2, . . . , s; u(k) = [u
1
(k), u
2
(k),
. . . , u
i
(k), . . . , u
t
(k)]
T
∈ R
t
为系统输入向量, t 表示
剩余10页未读,继续阅读
2021-12-09 上传
2021-08-10 上传
2022-09-24 上传
2022-08-03 上传
2022-06-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38501299
- 粉丝: 3
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
