Matlab助力平面机构分析:通用矩阵解析法与应用
版权申诉
本文档深入探讨了"基于Matlab的平面机构分析解析法"这一主题,针对机构学研究中面临的挑战,如数据处理量大、推导过程复杂且易出错的问题。传统的机构分析往往涉及复杂的矩阵运算,这使得研究人员寻求一种通用且高效的解决方案。作者选择Matlab作为工具,因为其强大的矩阵运算功能和优化工具箱,能极大地简化计算过程。
首先,论文以平面连杆机构为例,涵盖了其运动分析,包括但不限于位置、速度和加速度的计算。通过矩阵解析方法,作者避免了繁琐的手动展开操作,实现了对连杆机构运动规律的精确计算。这种方法不仅提高了计算效率,还降低了出错的可能性。
其次,文章扩展到平面连杆机构的类型判断与设计,利用Matlab的优化工具进行结构优化,旨在提高机构的性能和效率。同时,对于动态静力分析,文中讨论了如何运用数值解法处理多体系统中的力和运动关系,确保了结果的准确性。
此外,论文还探讨了单自由度机械系统的运动控制和速度波动调节,以及凸轮机构的设计,这些都充分利用了Matlab的矩阵运算和自动化特性。通过实例,展示了如何将Matlab技术应用于实际机械工程问题中,从而实现参数化设计和问题的快速解决。
总结来说,这份硕士论文提供了一种基于Matlab的平面机构分析新方法,它简化了机构学研究中的复杂计算,提高了分析的准确性和效率。这对于机构设计人员、科研工作者以及工程教育者来说,是一份极具价值的参考资料,因为它不仅提升了分析效率,还在一定程度上推动了机械工程领域的创新。通过这种通用且强大的工具,可以有效地应对现代机构学领域日益增长的数据处理需求。

西华大学硕士学位论文
9
4 平面连杆机构的类型判断、设计及优化
4.1 连杆机构概述
随着机械工业的发展,连杆机构在我们的日常生活、科研中随处可见,它不仅在工
农业机械、军事机械等如:工业机器人的手臂、飞机起落架等领域得到了广泛的应用。
所有的连杆机构不约而同都有一个特点,所有设计正确的原动件的运动都要经过不直接
与机架相连接的一个中间构件,我们称之为连杆(coupler),这种正确的结构才能够
传动从动件,我们称之为连杆机构(linkage mechanism)。本章以平面四杆机构为例,
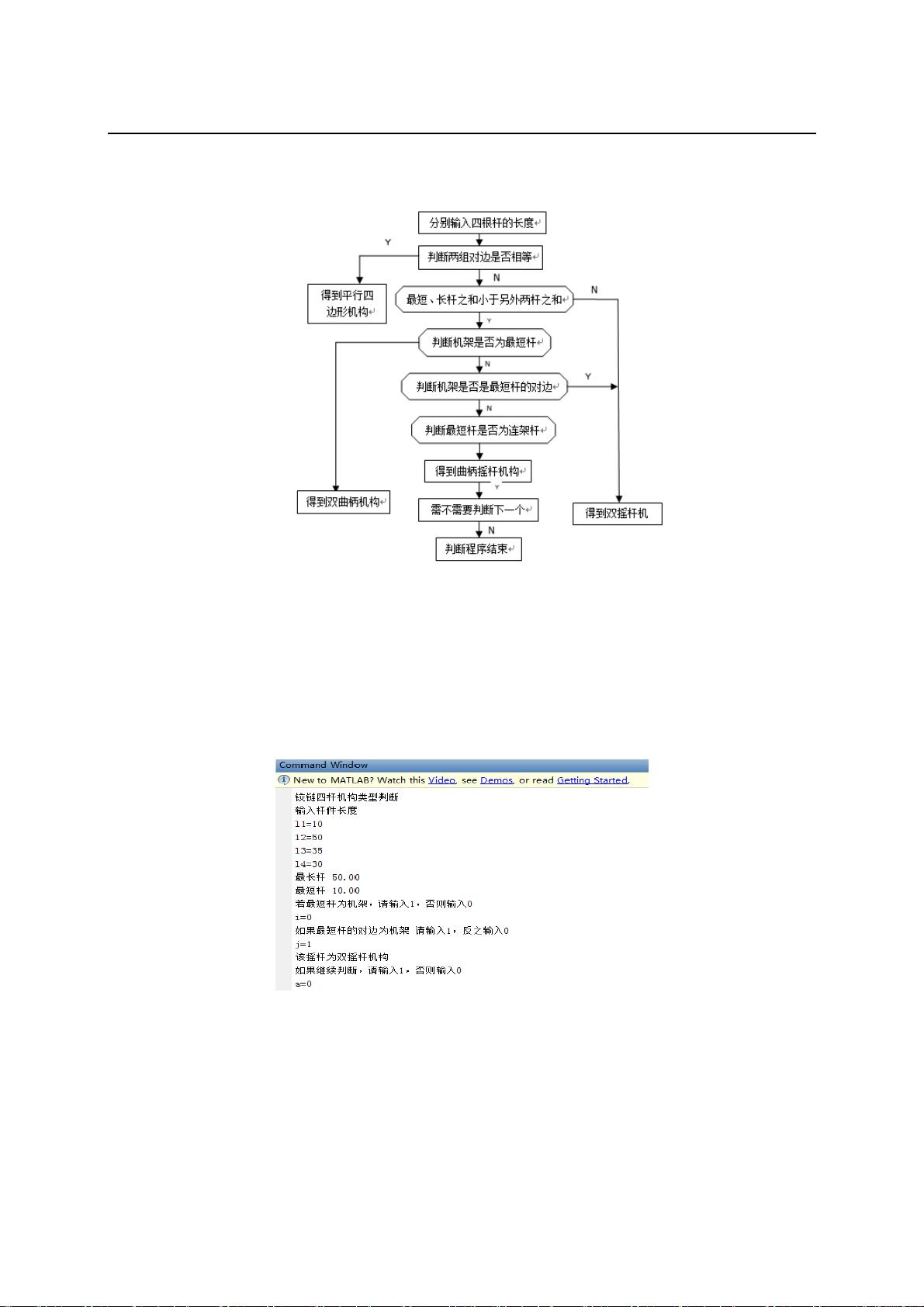
对不同情况的四杆机构用 Matlab 进行尝试性编程的类型判断、分析和求解及优化,提
出一个系统的解决方法。
4.1.1 平面连杆机构的传动特点
连杆机构一般被称为低副机构(lower pair mechanism),是由于构成机构的运动
副多为低副。它的传动特点有以下几点:
⑴运动副接触为面接触,承载能力大,所受压力小,容易加工制造,具有良好的润
滑性,且低副构成了封闭几何区间保证了工作的可靠性。
⑵能够在原动件运动规律不变的情况下改变从动件的相对长度,以改变其运动规
律。这些构件的曲线(coupler-point curve)运动形式多样,可以满足特殊工作需求。
4.1.2 平面四杆机构的分类
根据单一构件的运动规律,我们一般将能够做整周回转运动的杆为曲柄(crank),
只能在一定范围内做来回摆动的杆我们称为摇杆(rocker),与机架相连的杆我们称之
为连架杆(side link)。
因此,我们可以根据上述对杆的定义,来命名平面四杆机构。根据整个构件的运动
规律,我们可以将其分为以下三类:
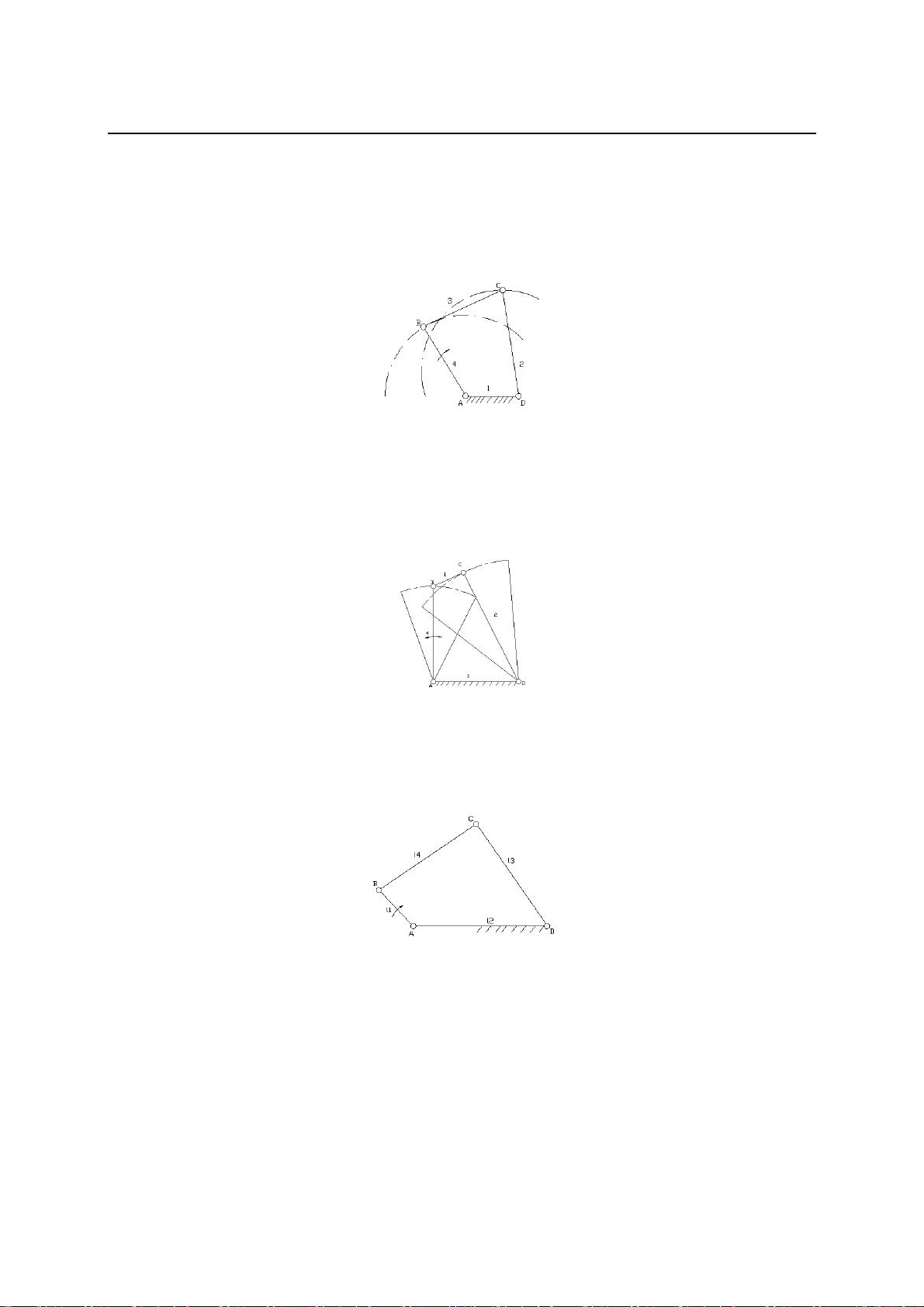
⑴曲柄摇杆机构
如下图所示,平面四杆机构分别由一个曲柄、摇杆所组成,这种机构我们称之为曲
柄摇杆机构。其运动特点是:如果主动件为曲柄,主动件的连续圆周运动将带动从动件
做往复摆动(如图 a 所示);反之,若主动件为摇杆时,主动件的摆动运动将转变为从
动件的整周回转运动。
a
⑵双曲柄机构

剩余83页未读,继续阅读
相关推荐





icwx_7550592
- 粉丝: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言课程设计:数据结构与类实现
- JasperReport全面指南v1.0:XML解析与报告处理详解
- Linux内核基础教程:从硬件到进程管理
- 大连民族学院班级管理系统:需求分析与功能概览
- 深入理解Struts框架:架构与组件解析
- Hibernate入门教程:从零开始掌握对象-关系映射
- Eclipse中文手册:全面指南与设置详解
- 软件项目管理计划详解:流程、角色与交付物
- 项目管理实施与控制规划
- 计算机常用英语术语词汇大全
- Java工厂方法设计模式详解与示例
- Python框架深度解析:Django与TurboGears构建Web 2.0应用
- C++经典第三版:原版英文教程指南
- 深入理解AJAX技术:原理与应用实例
- Oracle Designer:从建模入门到业务流程设计
- 软件配置管理与实践
