模糊神经网络PID控制在永磁同步电机伺服系统中的应用
版权申诉
54 浏览量
更新于2024-07-01
1
收藏 368KB DOCX 举报
"基于模糊神经网络的永磁同步电机伺服系统研究,探讨了如何通过结合模糊控制和径向基神经网络改善永磁同步电机(PMSM)的PID控制策略,以提升电机调速系统的动态和静态性能。文章介绍了PMSM矢量控制的基本原理,并提出了模糊径向基神经网络PID控制器的设计方法。"
永磁同步电机(PMSM)是现代工业应用中的重要动力设备,因其高功率密度、宽调速范围和高效率而受到青睐。在PMSM的控制策略中,矢量控制和直接转矩控制是常见的高性能控制方式。传统的PID控制虽然简单实用,但在面对负载扰动或追求更高控制精度时,其动态性能往往不足。
针对这一问题,研究者们提出了一系列改进方法。文献中提到了模糊PID控制用于在线调整速度环参数,以减少超调,但效果有限;模糊控制应用于转速环配合粒子群优化算法,提高了响应速度,但启动时转矩波动大;通过动态调整模糊PID控制的论域,可以提升模糊规则的效率,但实现过程复杂;模糊控制同时应用到转速环和电流环,增强了系统动态性能,但增加了实现难度。
本文提出的解决方案是在PMSM的矢量控制系统基础上,融合模糊控制和径向基神经网络(RBF),设计了一种模糊RBF神经网络PID控制器。该控制器利用转速误差和误差变化率作为输入,动态调节PID参数,以期在保持系统稳定性的同时,显著提升动、静态性能。这种控制策略的系统结构包括转速环、电流环、逆变器、空间矢量脉宽调制算法以及PMSM本身。
在d-q轴坐标系下,通过Clark变换和Park变换实现定子电流的解耦,控制d轴电流为0,模拟直流电机的控制效果。电压方程在此坐标系下被建立,反映了电机运行的基本动态关系。
通过仿真和实验验证,模糊RBF神经网络PID控制策略证明了其有效性和优越性,为PMSM伺服系统的控制提供了新的思路。这种方法不仅能够优化控制响应,还能适应不同的工作条件,为实际应用中的电机控制提供了更为灵活和精确的手段。
模糊径向基神经网络结合了径向基(Radial Basis Function,RBF)神经网络
和模糊控制的优点,既解决了模糊规则不能在线调整的问题,也降低了神经网络
参数设置的随机性
[14]
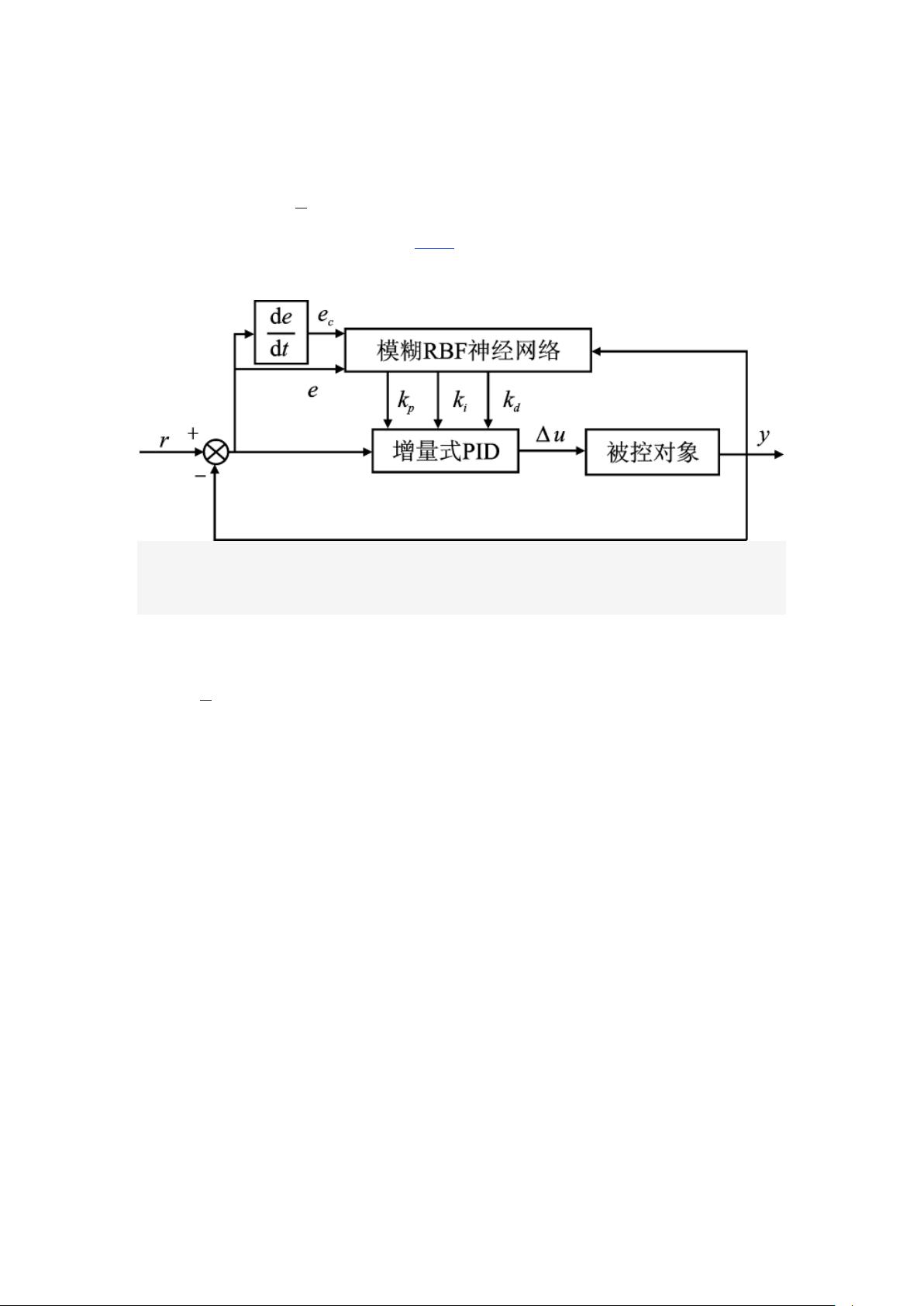
。本文将模糊 RBF 神经网络与增量式 PID 控制相结合,实
现 PID 参数的自动调整,其结构如图 2 所示。
图 2
图 2 模糊 RBF 神经网络 PID 控制结构图
Figure 2. The diagram of fuzzy RBF neural network and PID control
structure
模糊 RBF 神经网络 PID 控制器包括模糊 RBF 神经网络系统和增量式 PID
控制器
[15]
。本文中,设计模糊 RBF 神经网络控制器以系统给定转速与实际转速
间的差值 e 和误差变化率 e
c
作为输入,经过模糊 RBF 神经网络的计算,得到整
定后的 PID 参数,包括动态调整比例系数 k
p
、积分系数 k
i
和微分系数 k
d
。
2.2 增量式 PID
增量式 PID 是一种输出控制量增量的离散式 PID 控制方式,其输出为
Δu(k)=k
p
[e(k)-e(k-1)]+k
i
e(k)+k
d
[e(k)-2e(k-1)+e(k-2)]
(4)
式中,k 是采样时刻;Δu(k)为增量式 PID 的控制增量,仅与前三次采样的误差
值相关,不需要累加,可有效提高运算效率。由 Δu(k)得控制量 u(k)如式(5)所示。
u(k)=u(k-1)+Δu(k)
(5)
2.3 模糊 RBF 神经网络 PID 设计
剩余14页未读,继续阅读
2019-08-16 上传
2021-10-03 上传
2022-01-03 上传
2022-11-24 上传
2023-10-03 上传
2023-02-23 上传
2022-12-15 上传

罗伯特之技术屋
- 粉丝: 4464
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 静态前端网页制作html+css+div+jquery电子商务网站玩具商城购物系统.rar
- STM32项目设计:基于stm32f1的智能门锁(附项目视频全套教程)
- 蜂巢里的小蜜蜂光标特效
- 行业分类-外包设计-排包装置的介绍分析.rar
- 硬件工程师培训教程04 CPU AMD 阵营-教程与笔记习题
- examples:帮助您熟悉 TimescaleDB 的示例应用程序和工具集合
- 星戈瑞荧光BODIPY606636氟化硼二吡咯606636
- Movies sites AdBlock-crx插件
- dspace-rest-api:DSpace REST API的重新开发版本
- 【WordPress主题】2022年最新版完整功能demo+插件v3.1.1.zip
- reactive:自定义React式绑定
- 机械设计半自动纸盒包装机sw18可编辑非常好的设计图纸100%好用.zip
- 论坛社区PHPWind v6.0 build 1207 UTF-8简体中文版-phpwind-utf8-6.0.rar
- 硬件工程师培训教程09 第三章 主板综述-教程与笔记习题
- ASP实例开发源码-百度网址大全带后台 asp版 v1.0.zip
- 行业分类-外包设计-支装口服液包装机的瓶子立转卧姿态变换装置的介绍分析.rar
