舵机原理与控制详解:PWM信号与数码模拟之差异
需积分: 46 39 浏览量
更新于2024-09-11
3
收藏 335KB PDF 举报
舵机原理及其使用详解
舵机是一种常见的机电设备,主要用于控制机械装置的精确转动,常应用于无人机、模型飞机、机器人等领域的伺服系统。本文将深入探讨舵机的基本原理,包括其构造、接线方式以及两种类型的舵机——数码舵机与模拟舵机的对比。
一、舵机原理
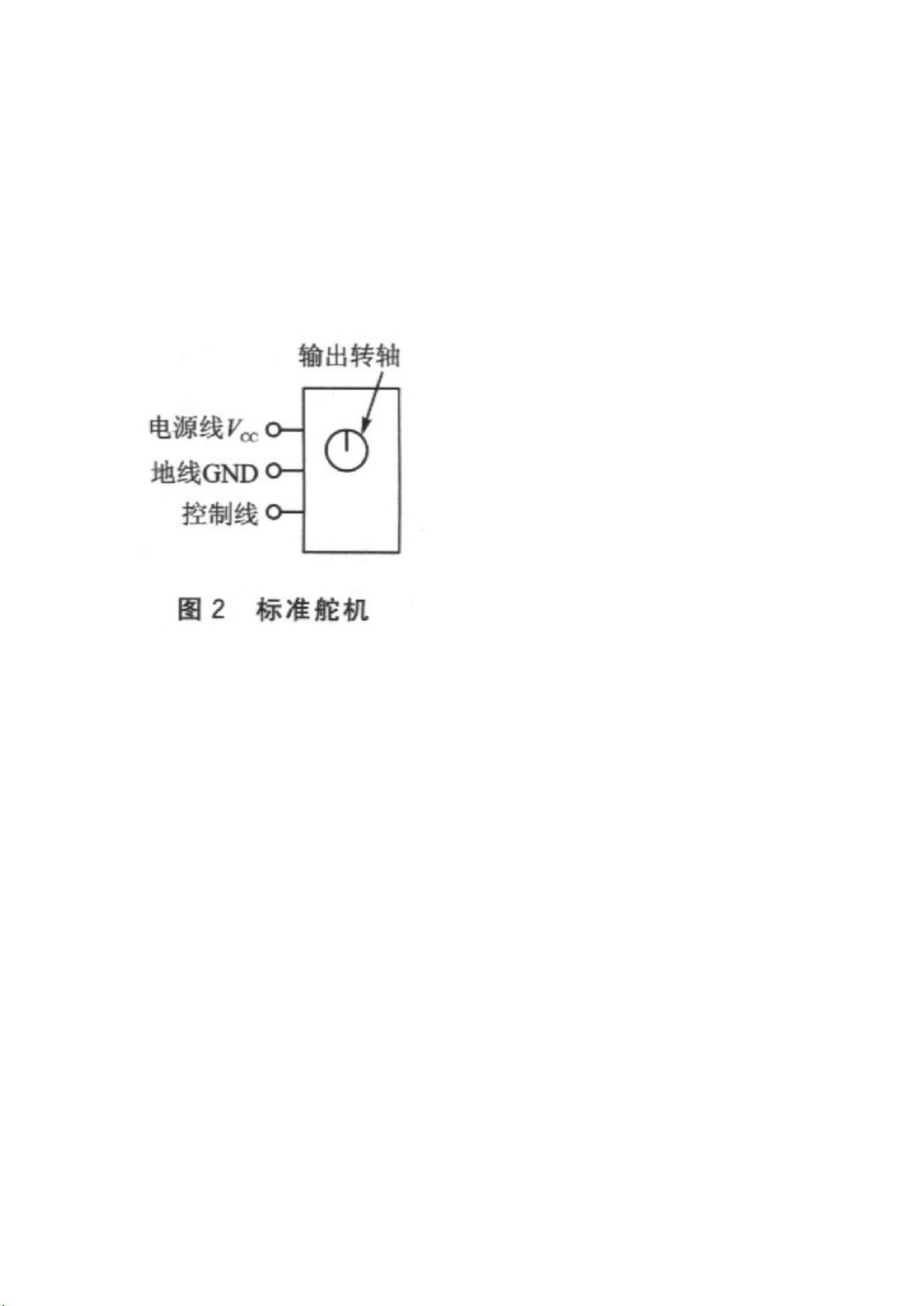
标准舵机通常由三根导线构成:电源线、地线和控制线。电源线(4-6V,常见为5V)为电机提供直流电力,地线则作为电流回路的参考点。控制线接收PWM(Pulse Width Modulation)信号,通过改变信号的占空比,实现对舵机转角的精确控制。例如,FUTABA-S3003型舵机的工作过程涉及信号解调电路BA6688,它能够处理PWM信号,通过比较直流偏置电压和电位器的电压,控制电机的正反转,并通过EMF(Electromotive Force,电动势)控制防止过冲现象。
二、接线与电源
接线时,确保电源线连接到舵机的电源端,地线接地,而控制线则与微控制器或信号源相连。控制信号是方波脉冲,频率为50Hz,脉冲宽度决定了舵机的转动角度。比如,一个特定型号的舵机,其转角与输入信号的脉冲宽度之间存在线性关系,可以用公式表示。
三、数码舵机与模拟舵机对比
数码舵机与模拟舵机的主要区别在于信号处理方式。数码舵机依赖于数字信号处理技术,通常使用微处理器,能实现更精确的位置控制和故障诊断。优点包括响应速度快、精度高、易于编程和远程控制。然而,这也意味着数码舵机可能需要更多的功耗和成本。
相比之下,模拟舵机使用的是模拟信号,其工作原理更为直观,成本较低,但精度和响应速度可能不如数码舵机。模拟舵机在空载时无动力消耗,当外部信号或负载变化时才启动,这可能导致启动延迟和抖动。
选择哪种类型的舵机取决于应用的具体需求,如精度、成本、控制复杂性和可靠性等因素。理解舵机的工作原理和接线是进行有效设计和维护的关键。在实际应用中,正确的选型和合理配置可以显著提升系统的性能和稳定性。
舵机的原理,以及数码舵机 VS 模拟舵机
一、舵机的原理
标准的舵机有 3 条导线,分别是:电源线、地线、控制线,如图 2 所示。
以日本 FUTABA-S3003 型舵机为例,图 1 是 FUFABA-S3003 型舵机的内部电路。
3003 舵机的工作原理是 : PWM 信号由接收通道进入信号解调电路 BA6688 的 12 脚进行解调 , 获得一个直
流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由 BA6688 的 3 脚输出。该输出送入电机
驱动集成电路 BAL6686 ,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器 Rw1 旋转 , 直
到电压差为 O ,电机停止转动。
舵机的控制信号是 PWM 信号,利用占空比的变化,改变舵机的位置。
有个很有趣的技术话题可以稍微提一下,就是 BA6688
BA6688
BA6688
BA6688 是有 EMF
EMF
EMF
EMF 控制的,主要用途是控制在高速时候电
机最大转速。
原理是这样的 :
下载后可阅读完整内容,剩余7页未读,立即下载
点击了解资源详情
点击了解资源详情
2011-08-03 上传
2014-08-20 上传
点击了解资源详情
点击了解资源详情

ywm061010315
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
