CAN总线技术详解:从基础到应用
需积分: 10 99 浏览量
更新于2024-07-17
1
收藏 927KB PDF 举报
"CAN总线快速入门"
CAN总线技术是一种广泛应用在汽车电子系统中的通信协议,它由德国Bosch公司在二十世纪八十年代初研发,旨在解决汽车中多个电子控制单元(ECU)之间的数据交换问题。CAN总线的设计初衷是通过减少汽车内部的线束复杂性,提高系统的可靠性和成本效益。
CAN总线概述:
CAN(Controller Area Network)是一种多主站的串行通信协议,允许在同一网络中的多个设备进行双向通信。它的设计目标是实现汽车内部不同ECU之间的高效、可靠的数据传输。CAN总线采用仲裁机制,可以避免数据冲突,即使在网络中有多个设备同时发送数据时也能确保数据的正确接收。
CAN总线起源与发展历史:
CAN技术的开发始于1983年,由Bosch和Intel合作完成。1987年,Intel推出了第一块CAN控制器芯片。1990年,梅赛德斯S-Class成为首款采用CAN总线技术的量产车。随后,1991年发布了CAN2.0规范,分为PART A和PART B两部分,进一步提升了CAN的通信能力和灵活性。1993年,CAN被国际标准化组织(ISO)采纳,制定了ISO 11898标准,使得CAN总线在全球范围内得到广泛应用。
数据链路层:
在OSI模型中,CAN总线位于数据链路层,负责处理物理层之上的通信任务。CAN协议定义了帧结构,包括标识符(ID)、数据长度码(DLC)以及数据字段等,以确保不同优先级的信息能够按照正确的顺序传输。此外,CAN总线还具有错误检测和错误处理机制,增强了通信的可靠性。
物理层:
物理层是CAN总线通信的基础,它定义了信号的传输方式、信号电平、电缆类型以及终端电阻等硬件参数。CAN总线通常采用双绞线作为传输介质,以减少电磁干扰(EMI)和共模干扰(CMR)。物理层的特性使得CAN总线能够在恶劣的电气环境中稳定工作。
汽车电子发展趋势:
随着汽车电子化程度的不断提高,ECU的数量和功能日益增强,CAN总线的作用也更为显著。早期的汽车中,ECU之间的通信依赖于复杂的线束连接,但这种方式效率低且成本高。引入CAN总线后,汽车内部的通信变得更加高效,减少了线束数量,降低了制造成本,并提高了系统的可扩展性。
基于总线的ECU通信:
在基于CAN总线的通信系统中,每个ECU都可以作为发送者或接收者,通过总线发送或接收数据。这种分布式控制系统使得汽车电子系统能够实现更高级别的自动化和智能化,如发动机管理、刹车系统、安全气囊控制、车载娱乐系统等。
总结来说,CAN总线是汽车电子系统中不可或缺的一部分,它的出现极大地推动了汽车电子技术的发展,使得车辆变得更加智能和安全。通过对CAN总线的理解和应用,工程师能够构建更加高效、可靠的汽车电子网络。
© 2007 . HiRain Technologies. All rights reserved.
Slide:
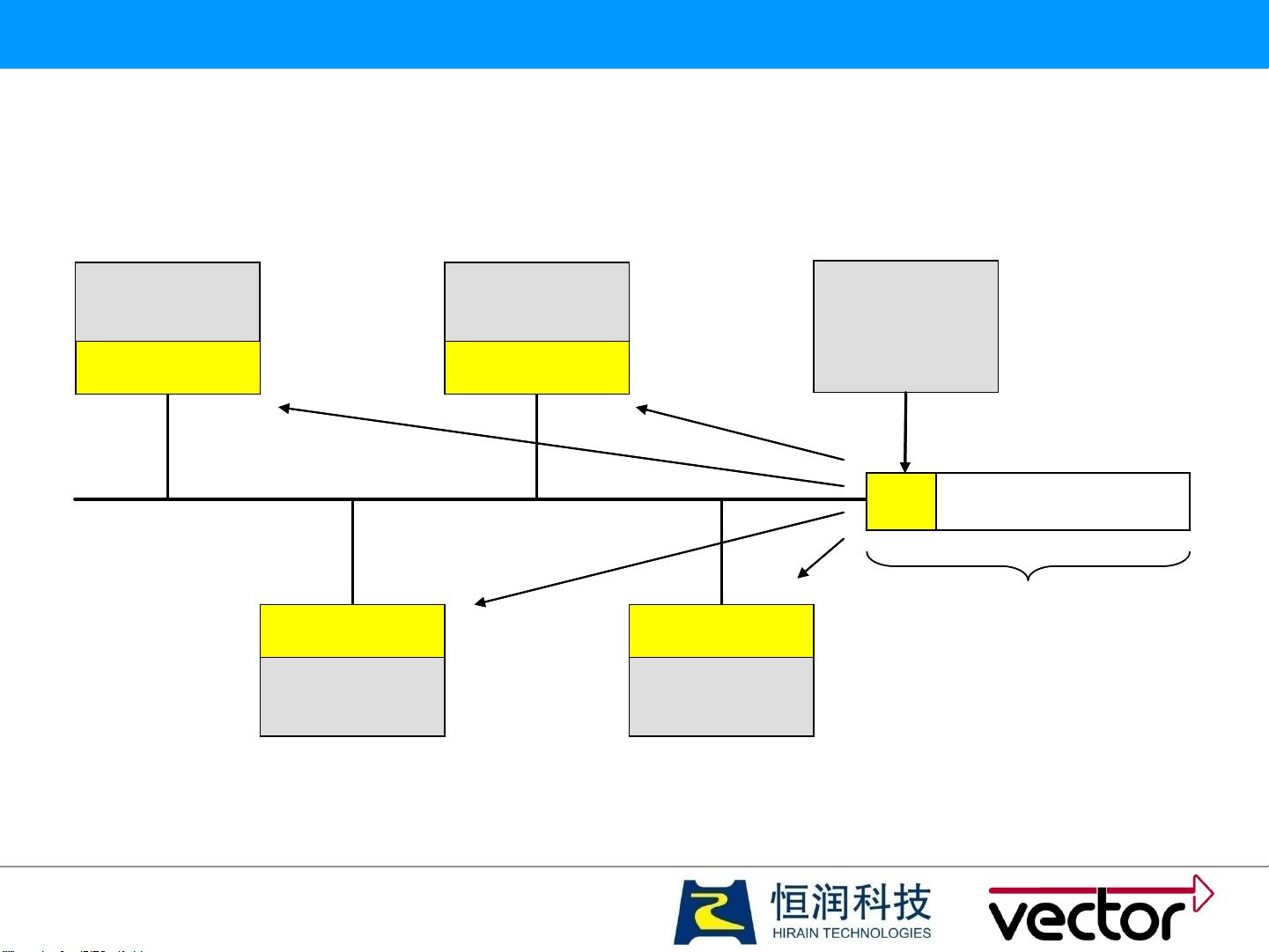
CAN总线基本概念
在CAN总线上传输的数据报文不包含发送节点和
接收节点的信息
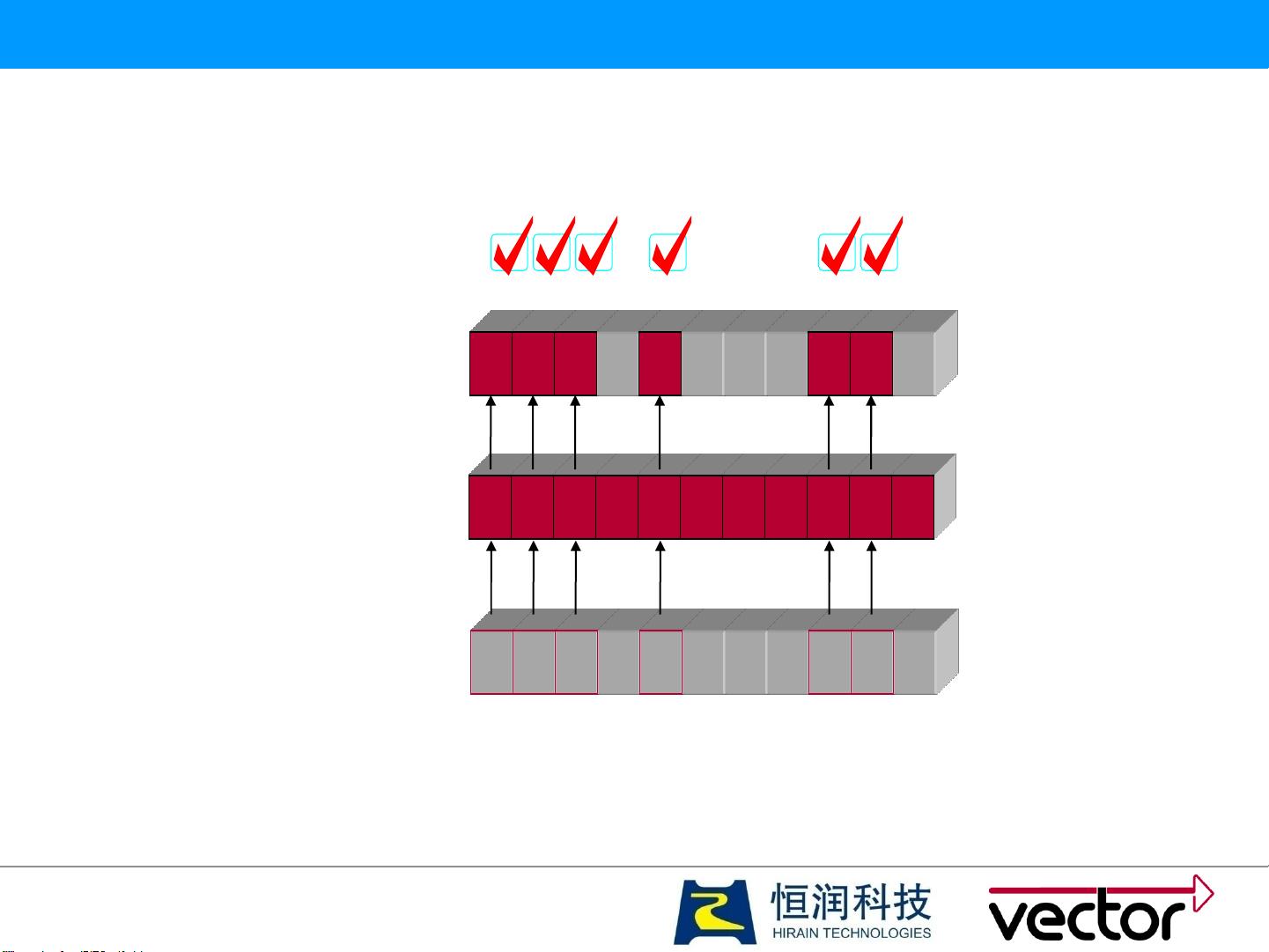
每个报文的内容通过标识符(ID)识别,标识符
在网络中是唯一的
标识符描述了数据的含义,同时也是决定优先级的主要
因素
报文可以被所有节点同时接收(广播)
可以进行报文过滤
12
剩余70页未读,继续阅读
2019-01-05 上传
2013-01-07 上传
2018-07-27 上传
2022-09-20 上传
2013-03-09 上传
2021-09-29 上传
2018-11-05 上传
2019-01-03 上传
2014-11-11 上传

qq_20991805
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
