




多视角三维重建教程
"Multi-View Stereo: A Tutorial" 是一篇由Yasutaka Furukawa(华盛顿大学圣路易斯分校)和Carlos Hernández(谷歌公司)合著的技术论文,主要探讨了多视图立体(Multi-View Stereo, MVS)技术在三维重建中的应用和理论。这篇论文发表在《计算机图形学与视觉的基础与趋势》(Foundations and Trends in Computer Graphics and Vision)期刊的第9卷第1-2期,共计148页,出版于2013年。
多视图立体是计算机视觉领域的一个重要研究方向,它利用多个不同视角拍摄的图像来恢复场景的三维几何信息。该技术的核心在于通过匹配不同视图中的特征,构建一个稠密的深度图,从而实现三维重建。在实际应用中,多视图立体广泛用于考古、建筑、电影制作、机器人导航以及虚拟现实等领域。
论文“Multi-View Stereo: A Tutorial”可能涵盖了以下几个关键知识点:
1. **图像配准**:这是多视图立体的基础,通过对不同视角的图像进行精确对齐,确保同一场景点在不同图像中对应一致。
2. **特征检测与匹配**:包括SIFT、SURF等经典特征描述符的使用,以及如何在不同图像间寻找对应点,以确定视图间的对应关系。
3. **稀疏到稠密深度重建**:从初始的特征匹配结果开始,通过扩展和优化,逐渐增加深度图的密度,直至获得整个场景的稠密深度信息。
4. **立体匹配算法**:如基于成本聚合的算法(如半全局匹配,Semi-Global Matching)和基于深度优化的方法,这些算法用于计算每个像素的深度值。
5. **几何一致性检查**:通过验证从不同视图恢复的深度信息是否一致,去除不合理的深度估计,提高重建的精度。
6. **后处理技术**:包括深度图平滑、空洞填充等步骤,以提高重建结果的质量。
7. **多视图几何**:如基础矩阵和本质矩阵的计算,以及如何利用它们来恢复场景的三维结构。
8. **实时与大规模三维重建**:讨论在处理大量数据或要求实时性能的场景下,如何优化算法以满足需求。
9. **应用实例**:论文可能会展示MVS技术在实际项目中的应用,如文化遗址的数字化、电影特效的制作等。
这篇教程性论文不仅介绍了多视图立体的基本原理,还可能深入讨论了相关技术的最新进展和挑战,对于学习和研究三维重建的读者来说,是一份非常宝贵的参考资料。

6 Introduction
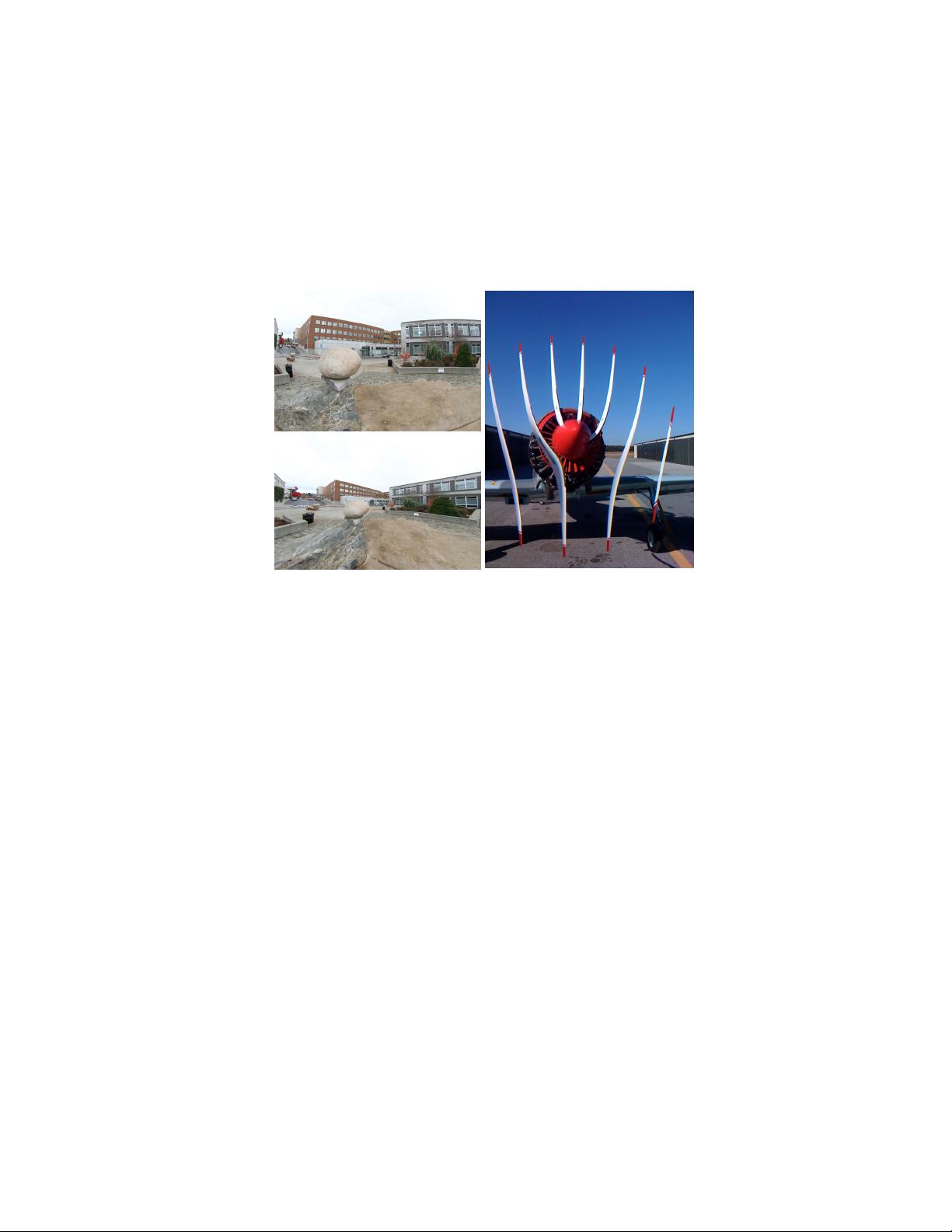
Figure 1.3: Different MVS capture setups. From left to right: a controlled MVS
capture using diffuse lights and a turn table, outdoor capture of small-scale scenes,
and crowd-sourcing from online photo-sharing websites.
In the chapter we will give more insight into the first three main
stages of MVS: imagery collection, camera parameters estimation, and
3D geometry reconstruction. Chapter 2 develops the notion of photo-
consistency as the main signal being optimized by MVS algorithms.
Chapter 3 presents and compares some of the most successful MVS al-
gorithms. Chapter 4 discusses the use of domain knowledge, in particu-
lar, structural priors in improving the reconstruction quality. Chapter 5
gives an overview of successful applications, available software, and best
practices. Finally Chapter 6 describes some of the current limitations
of MVS as well as research directions to solve them.
1.1 Imagery collection
One can roughly classify MVS capture setups into three categories (See
Figure 1.3):
• Laboratory setting,
• Outdoor small-scale scene capture,
• Large-scale scene capture using fleets or crowd-sourcing, e.g.,
cars, planes, drones, and Internet.
MVS algorithms first started in a laboratory setting [184, 147, 58],
where the light conditions could be easily controlled and the camera



剩余163页未读,继续阅读
539 浏览量
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传
2024-11-19 上传

瘦瘦的五花肉
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开








最新资源
- 软件项目管理:全流程指南与案例精选
- Cadence封装教程:制作1N4148m与1N5819
- 深入探索Spider C++源代码及其网络爬虫技术
- 使用Delphi编写Windows进程终止代码示例
- Ruby on Rails 源码分析与工具应用
- JavaScript服务器端技术详解
- 探索sizeof函数:编程中的内存管理技巧
- VC++与MapX打造专业电子地图教程
- 使用OpenMP并行实现π值计算实验
- 西电MSP430课程全章节课件汇总
- 图片上传功能演示及预览教程
- SM2/SM3/SM4加密工具:国密算法的完整解决方案
- MySQL数据库学习资料合集,助你轻松掌握数据库知识
- Adobe Reader 10.0.0中文版下载指南
- React项目搭建与开发流程指南
- 解析C语言编写的魔王语言解释系统






















