CAN总线位定时与同步机制深度解析
需积分: 0 121 浏览量
更新于2024-09-10
收藏 536KB PDF 举报
"CAN总线位定时和同步的研究与设计"
本文主要探讨了控制器局域网(CAN)总线的位定时和同步机制,这是CAN通信规范中的关键环节,对于理解CAN总线的工作原理和正确配置至关重要。CAN总线因其高纠错能力、差分收发模式以及长距离传输特性,在工业领域广泛应用,包括TTCan、DeviceNet、CANopen和SAE J1939等基于CAN的通信协议。
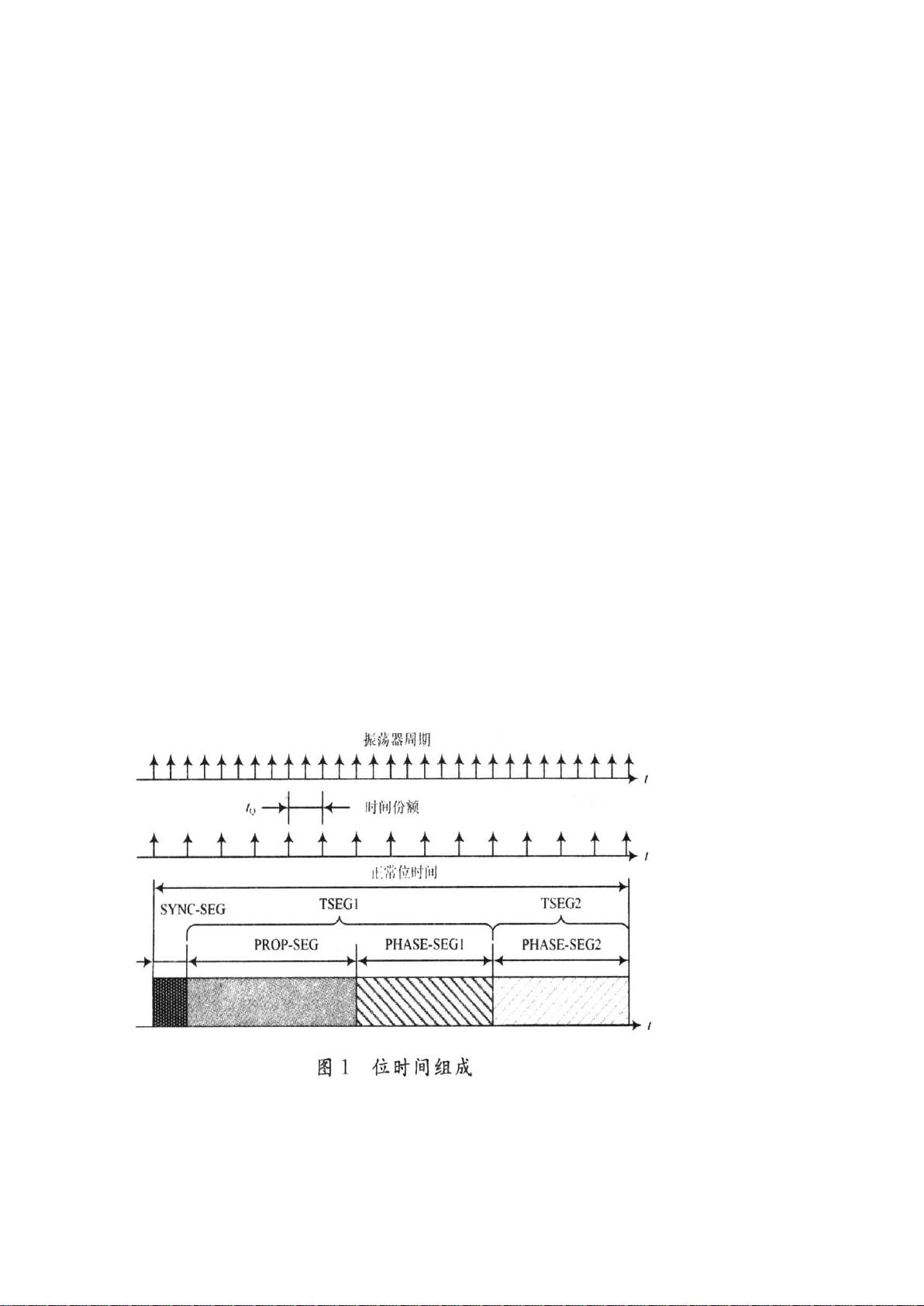
位定时是CAN总线通信的基础,它定义了一个位的持续时间,即位周期(tB)。位时间可以分为四个主要部分:同步段(SYNC-SEG)、传播时间段(PROP-SEG)、相位缓冲器段1(PHASE-SEG1)和相位缓冲器段2(PHASE-SEG2)。每个部分由固定时间单元——时间份额(tQ)组成,tQ通常等于CAN系统的时钟周期tSCL,其值可以通过预分频器调整。位时间的长度规定为8到25个时间份额。
- 同步段:长度为1个时间份额,确保所有节点在同一时刻开始读取新的位,通常包含一个跳变沿,用于节点间的同步。
- 传播时间段:长度是物理延迟的两倍,补偿信号在网络中的传播时间和设备处理延迟。
- 相位缓冲器段1和2:这两个段用于相位调整和错误检测,它们可以动态调整,以应对时钟漂移和传输延迟。
同步机制在CAN总线中分为硬同步和重同步。硬同步发生在每个位的开始,即同步段,确保所有节点在新位的起始时刻同步。而重同步则在中间位出现相位错误时进行,通过调整后续位的相位缓冲器段来恢复同步。
文章详细分析了位时间参数的设置,这对优化CAN总线性能和确保通信可靠性具有重要意义。通过对位定时和同步机制的深入理解,开发者能够更好地设计和调试CAN节点,从而避免通信问题,提高系统的稳定性和效率。
此外,文章还提供了一些图形解释,帮助读者直观地理解这些复杂的概念,使得位定时和同步机制的本质更容易被理解和应用到实际工程中。这种深入研究对于那些涉及CAN总线系统设计和维护的专业人士来说,无疑具有很高的参考价值。
CAN 总线位定时和同步的研究与设计
时间:2009-08-04 12:51:28 来源:现代电子技术 作者:单琳娜,徐斌山,陈文平 佳木斯大学
引 言
控制器局域网 CAN 是一种用于连接汽车和工业场合中电子控制模块、传感器和执行器的串行、多主
通信规范。由于 CAN 总线具有很强的纠错能力、支持差分收发、传输距离远等特点,因此 CAN 总线用途
非常广泛,现已成为工业数据通信领域的主流技术、基础技术,目前比较流行的 TTCan,DeviceNet,
CANo-pen,SAE J1939等规范均是以 CAN 为基础的,因此对 CAN 总线的深入研究是十分必要的。在 CAN 规
范中,位定时和同步机制是既重要又难于理解的环节之一,它不仅关系到对波特率、总线长度等相关内
容的理解,甚至对节点开发的成功与否产生直接的影响。然而,目前相关文献均缺乏针对 CAN 总线位定
时和同步机制的详细分析和探讨。在此以 CAN 技术规范为基础,深入分析 CAN 总线的位定时和同步机制,
给出硬同步和重同步的定义,并给出相应的图解解释方式,对位时间的组成与结构、同步的发生时刻、
同步是如何进行的等关键内容给出了明确而又具体的分析。这里的工作对理解位定时和同步机制的本质、
指导位时间参数的设置均具有较高的参考价值。
1 位定时
1.1 位时间的组成
位时间(位周期)tB 即1位的持续时间。正常位时间 tNBT 是正常位速率 fNBT(在非重同步的情况下,
借助理想发送器每秒发送的位数)的倒数,即 tNBT=1/fNBT。正常位时间可划分为几个互不重叠的时间
段,这些时间段包括:同步段(SYNC-SEG)、传播时间段(PROP-SEG)、相位缓冲器段1(PHASE-SEG1)、相位
缓冲器段2(PHASE-SEG2)。每个时间段由整数个被称为时间份额 tQ 的基本时间单位组成。tQ 是由振荡器
周期 tCLK 派生出的一个固定时间单元。一个时间份额的持续时间通常便是CAN 的一个系统时钟周期tSCL。
tSCL 可通过可编程的预引比例因子进行调整。每个位时间必须由8~25个时间份额组成。位时间的组成
如图1所示。
位时间的各个时间段均有其特定的用途:
(1)同步段用于使总线上的各个节点同步,要求有1个跳变沿位于此段内,该段长度为1个时间份额;
(2)传播时间段用于补偿网络内的物理延时,它是信号在总线上传播时间、输入比较器延时和输出驱
动器延时之和的2倍,该段长度为1~8个时间份额;
下载后可阅读完整内容,剩余5页未读,立即下载
2012-08-08 上传
2021-09-20 上传
2023-04-28 上传
2023-05-13 上传
2023-06-28 上传
2023-09-17 上传
2023-06-25 上传
2023-03-28 上传
2023-06-24 上传

hkd_ywg
- 粉丝: 5
- 资源: 93
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
