新松GCR20-1100&GCR14-1400协作机器人软件操作指南
版权申诉
"新松GCR20-1100&GCR14-1400协作机器人软件使用手册提供了对这两款协作机器人的详细软件操作指南,包括开机与关机、用户界面介绍、编程、运行、状态监控、设置、关于信息以及断开连接的步骤。手册涵盖的软件版本为2.2.14,UI版本为1.2.15,由中科新松有限公司编写并拥有版权。"
新松GCR20-1100和GCR14-1400是两款协作机器人,主要特点是能够与人类在同一个工作空间内安全协作。手册详细介绍了如何操作这两款机器人的软件,以实现高效、安全的工作流程。
1. **打开与关闭电源**:这部分可能包括了正确启动和关闭机器人系统的步骤,确保操作的安全性和设备的正常运行。
2. **界面介绍**:
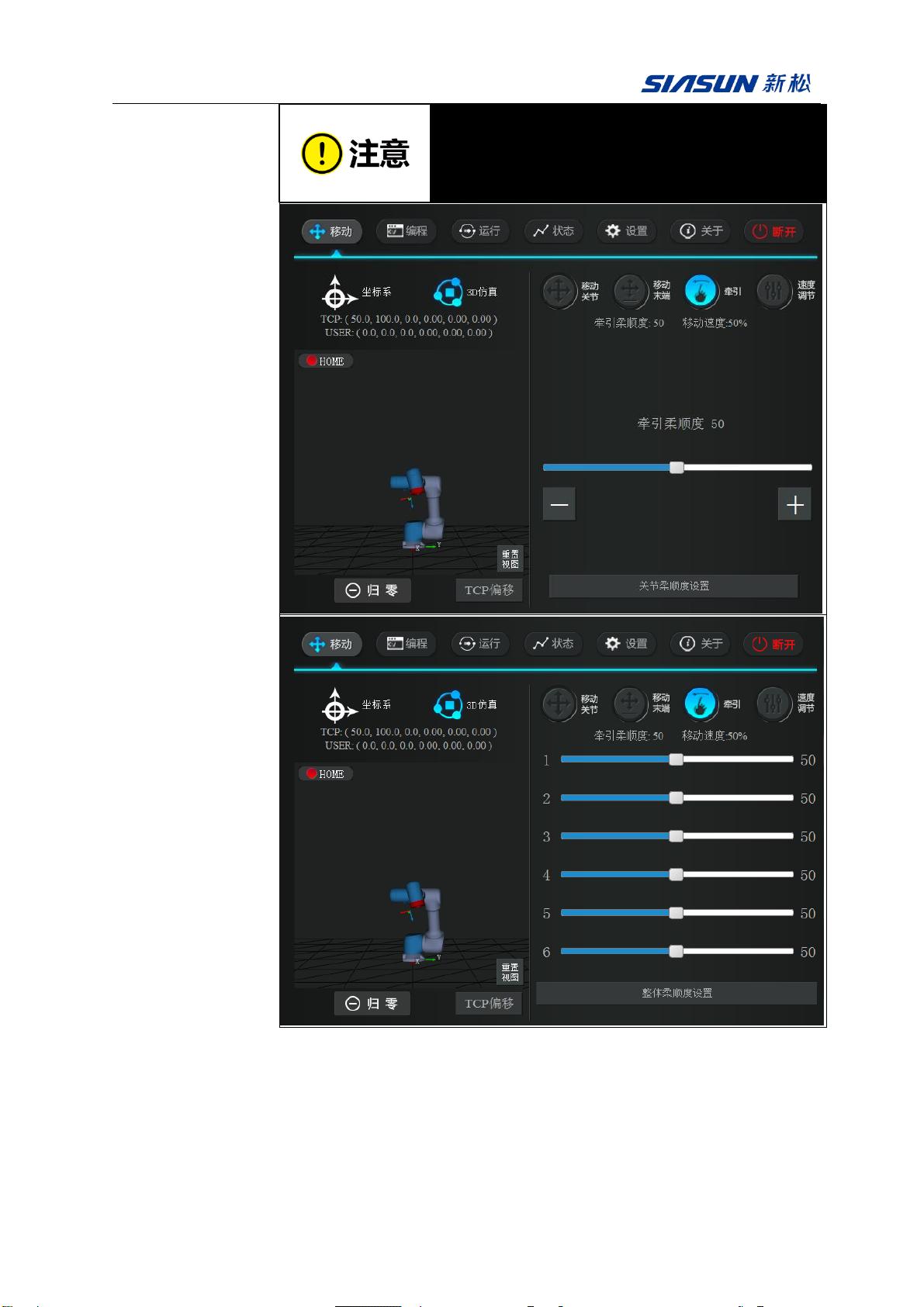
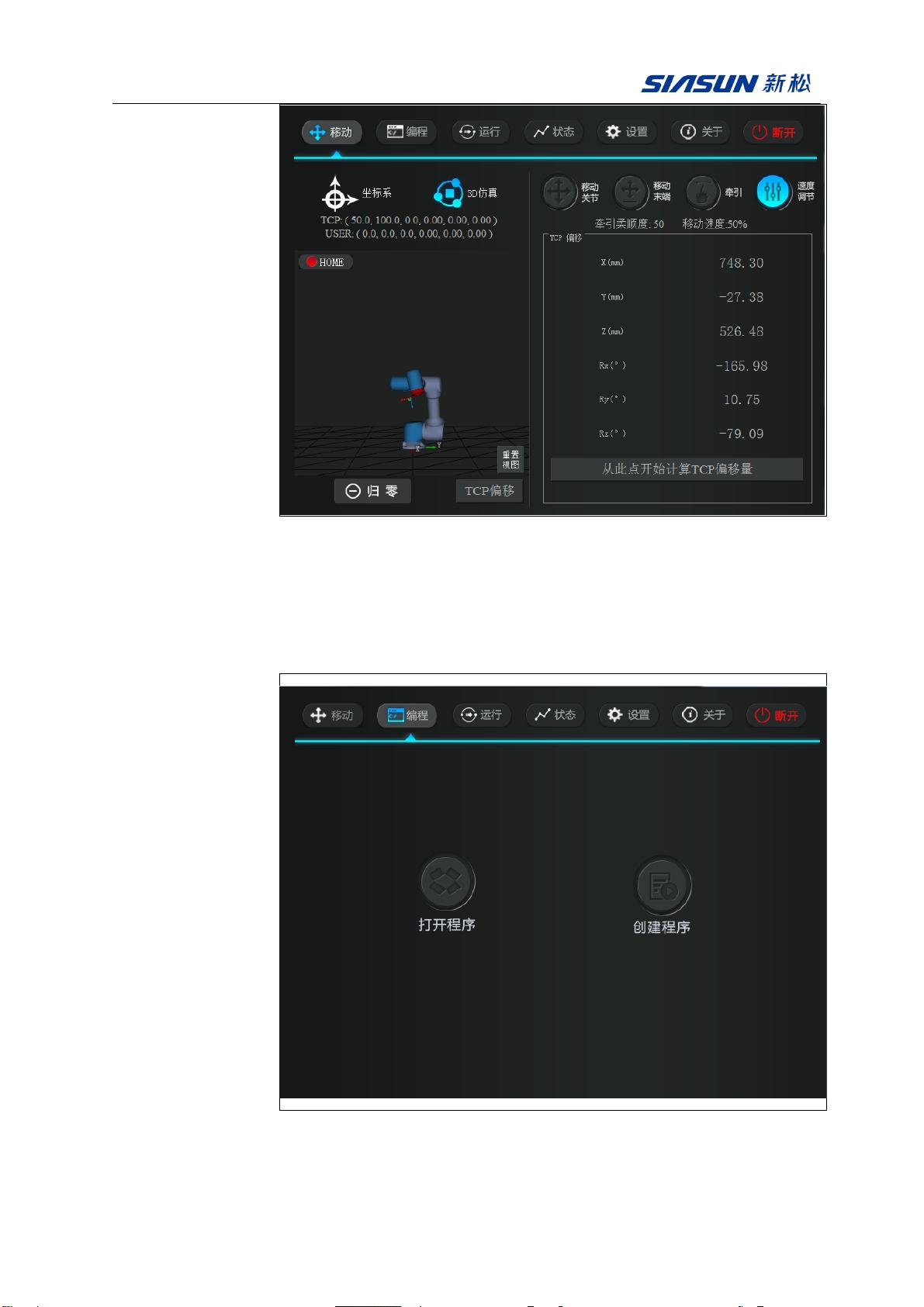
- **移动界面**:用于规划和控制机器人的运动路径。
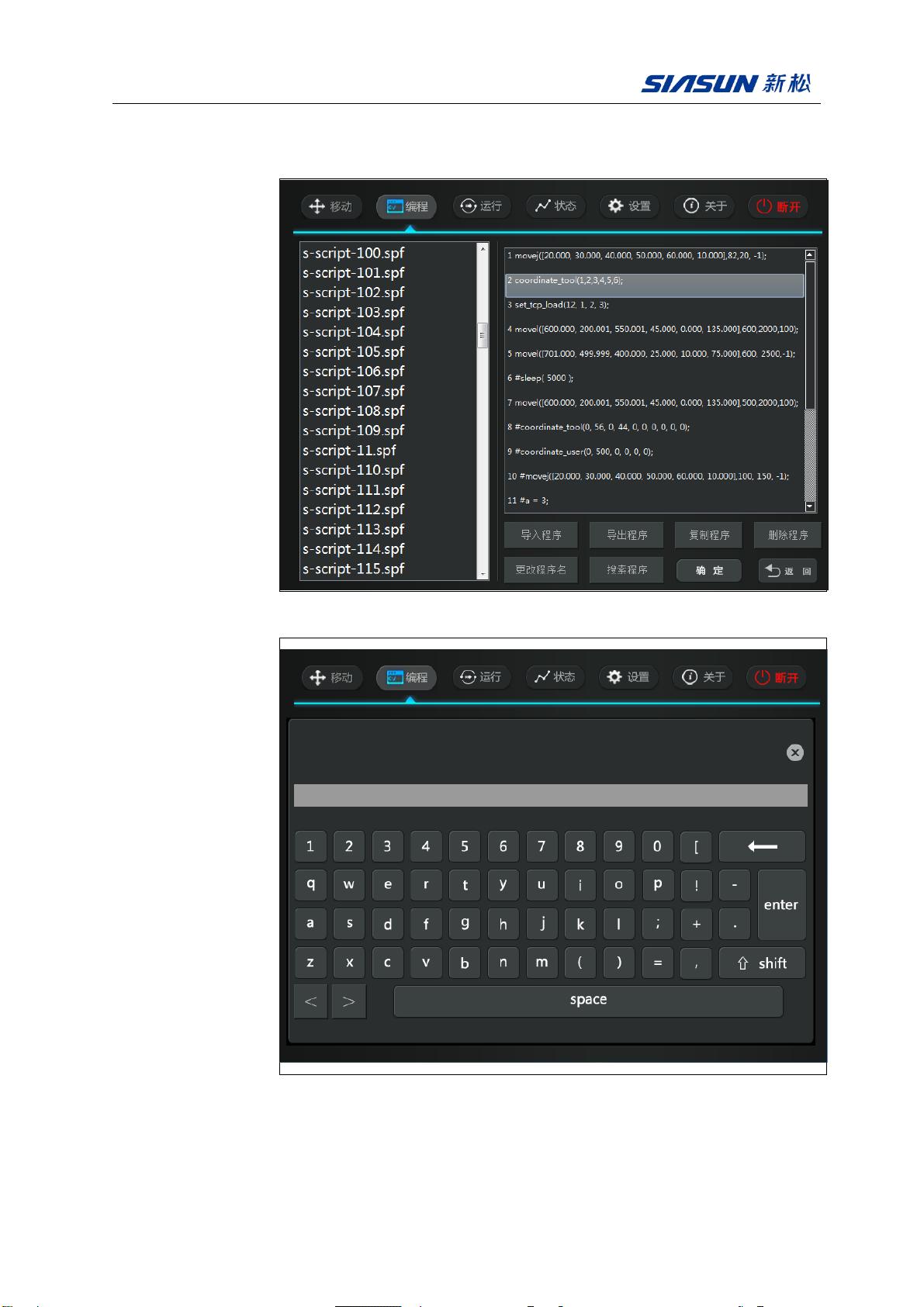
- **编程界面**:提供编程环境,用户可以创建和编辑程序。
- **运行界面**:展示机器人程序的执行情况。
- **状态界面**:显示机器人的实时状态信息,如电机状态、传感器数据等。
- **设置界面**:允许用户调整机器人参数和配置。
- **关于界面**:包含软件版本信息和公司详情。
- **断开界面**:可能是用于退出或断开与机器人连接的选项。
3. **机器人脚本编程**:
- **创建程序**:说明如何创建新的机器人程序。
- **MOVE标签**:包含一系列移动指令,用于定义机器人的精确位姿移动。
- **FUNCTIONS标签**:提供内置函数集合,帮助完成特定任务。
- **SOCKET标签**:涉及网络通信指令,允许机器人与其他设备或系统通信。
- **创建变量标签**:说明如何定义和使用变量。
- **示例**:提供了实际的代码示例,帮助理解编程概念。
4. **机械臂外部通讯接口**:这部分可能介绍了机器人如何通过I/O接口与其他设备交互,如传感器、PLC或控制器。
5. **脚本函数说明**:
- **简介**:概述脚本编程的基本原理和结构。
- **数据类型和变量**:包括内置数据类型、系统常量以及变量的定义和使用。
- **表达式**:涵盖算术、关系、逻辑运算以及赋值和函数调用表达式。
- **语句**:讲解不同类型的控制语句,如循环、条件控制、函数定义和返回语句。
本手册适用于已经购买或计划使用新松GCR系列协作机器人的用户,通过遵循手册中的指导,用户可以学习如何有效地编程、控制和监控机器人,以满足各种工业应用需求。同时,手册提醒用户,产品的具体功能和服务可能会受到购买合同和条款的限制,且内容可能会因产品升级而更新。
9
在牵引模式下,当关节接近限位时会产生反向驱
动力以提示用户接近极限位置。但是用户如果施
加足够大的力仍可以使关节继续接近极限位置。
当关节超过极限位置时机器人会报错并停机。

剩余76页未读,继续阅读
2024-01-14 上传
2024-11-07 上传
2024-11-04 上传
2024-11-07 上传
2023-10-09 上传
2024-11-04 上传

phl806
- 粉丝: 0
- 资源: 4187
 我的内容管理
展开
我的内容管理
展开







最新资源
- 浅谈非语言因素在秘书交际中的作用.zip
- [工具查询]主机域名查询测试工具_nqt-1.9.rar
- Excited Replay-crx插件
- commons-lang-2.0.tar.gz
- Gravity Snake (G-Snake) For Android:适用于 Android 的经典贪吃蛇游戏-开源
- modbus_master.zip_modbus_modbus master_modbus_master
- MIUI-v10-Serbian-translation:那是塞尔维亚语的新MIUI 10的翻译项目
- Example implementation of Co-simulation using Simulink:Example implementation of Co-simulation using Simulink-matlab开发
- 电信设备-集成式通信铁塔.zip
- commons-lang-2.1.zip
- SkillTracker-App:利用Spring Boot和Apache Solr的员工技能跟踪器应用程序
- 参考资料-剥肋滚压直螺纹钢筋连接.zip
- nowehackaton-equipo3
- 基于ssm高校图书馆个性化服务.zip
- fenfu.zip_aster 分幅
- MSP-EXP430FR2553例程代码
