机器视觉入门:相机与图像传感器核心技术解析
需积分: 17 171 浏览量
更新于2024-07-04
收藏 3.96MB PDF 举报
"这篇文档是关于机器视觉基础的,主要探讨了相机和图像传感技术,由Baumer Ltd.的销售经理Jon Chouinard主讲。文档内容包括光线基础、CCD/CMOS成像器原理、数字相机原理、接口标准以及相机类型和适用场景。"
在深入学习机器视觉时,首先需要理解的是光线的基础知识,这是图像传感技术的核心。光线是电磁波谱中非常狭窄的一段,我们关注的主要范围是从200到1100纳米,其中400到750纳米为可见光,其余部分则包括近紫外(NUV)和近红外(NIR)。光具有粒子和波的双重特性,光的粒子称为光子,光子的能量与其波长有关,不同能量的光子对应不同的颜色。光的强度取决于单位时间内光子的数量。
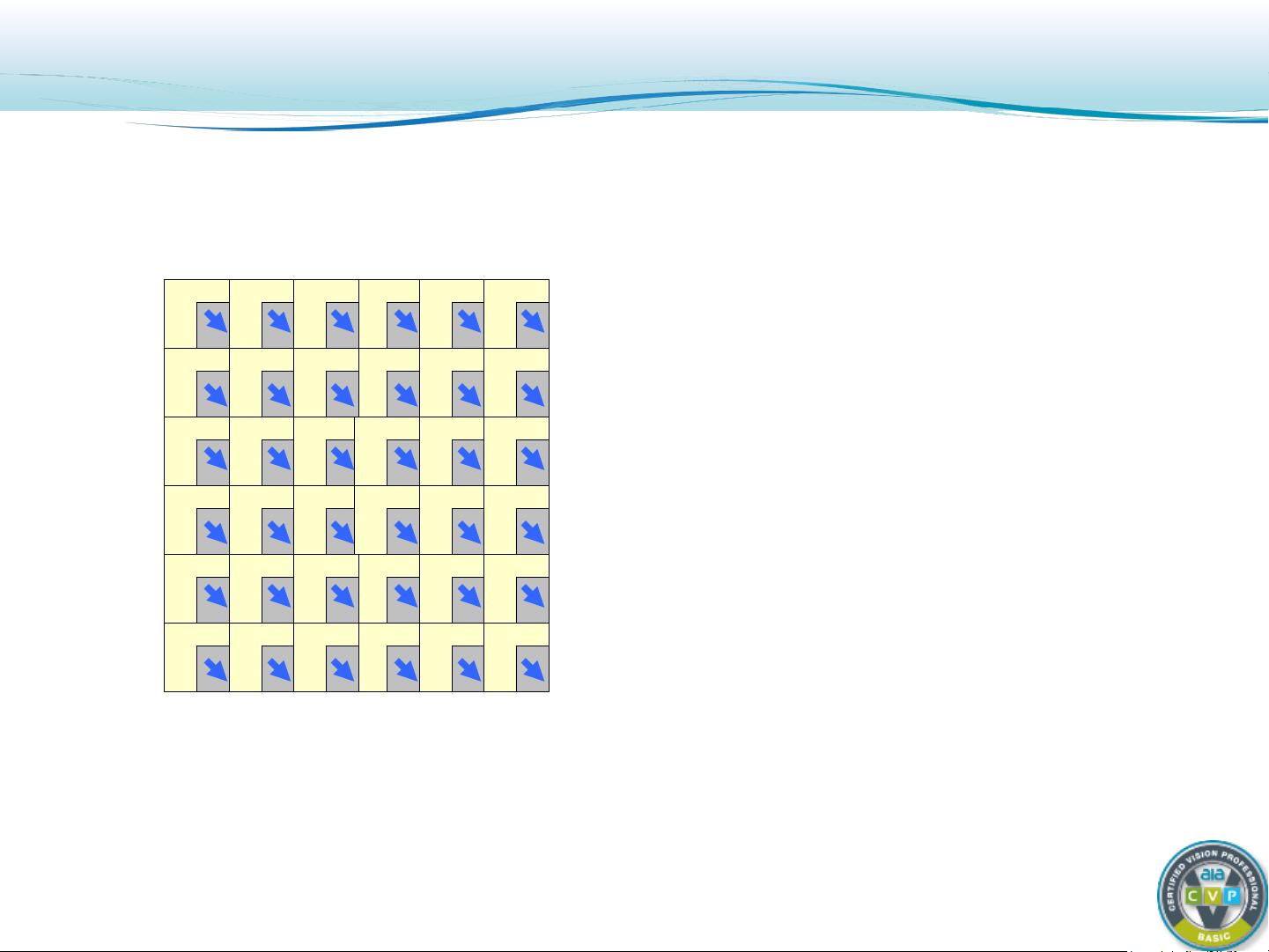
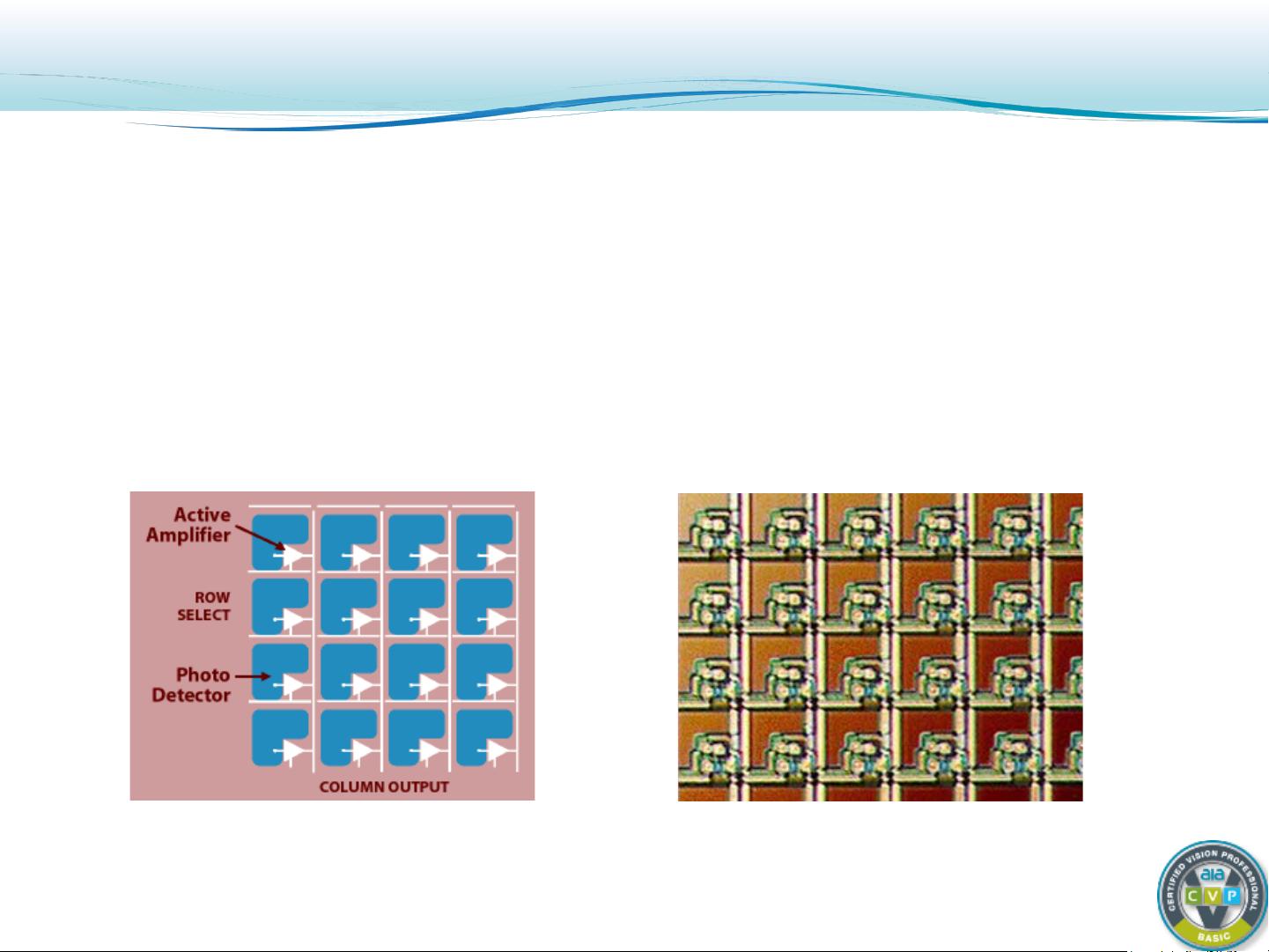
接着,文档讲解了CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)成像器的基本原理。这两种传感器都是机器视觉中常用的核心组件,它们能将接收到的光线转化为电子信号。CCD以其高信噪比和优异的图像质量而著名,适合于高质量成像应用;而CMOS传感器由于其低功耗、高速度和成本效益,现在被广泛应用于各种相机中。
数字相机原理部分可能涵盖了曝光控制、像素大小、动态范围和色彩深度等话题。曝光控制决定了传感器接收光线的时间,像素大小影响分辨率和感光性能,动态范围定义了相机捕捉亮部和暗部细节的能力,而色彩深度则关乎图像的颜色层次和准确性。
接口标准部分,可能会讨论如GigE Vision、USB3 Vision、Camera Link等工业相机常用的通信协议,这些接口决定了相机与计算机之间的数据传输速度和稳定性。
最后,关于相机类型和何时使用,文档可能分析了线扫描相机、面阵相机、全局快门和滚动快门相机等不同类型的特点,并提供了在不同应用场景中选择相机的指导原则。例如,线扫描相机适用于连续运动物体的检测,而全局快门相机则在需要精确捕获快速移动物体的场合更为合适。
通过这个基础课程,读者可以全面了解机器视觉系统的关键组件和技术,为进一步学习和应用机器视觉系统打下坚实基础。无论是设计机器视觉系统,还是进行相关产品的选型和应用,这些基础知识都是非常重要的。
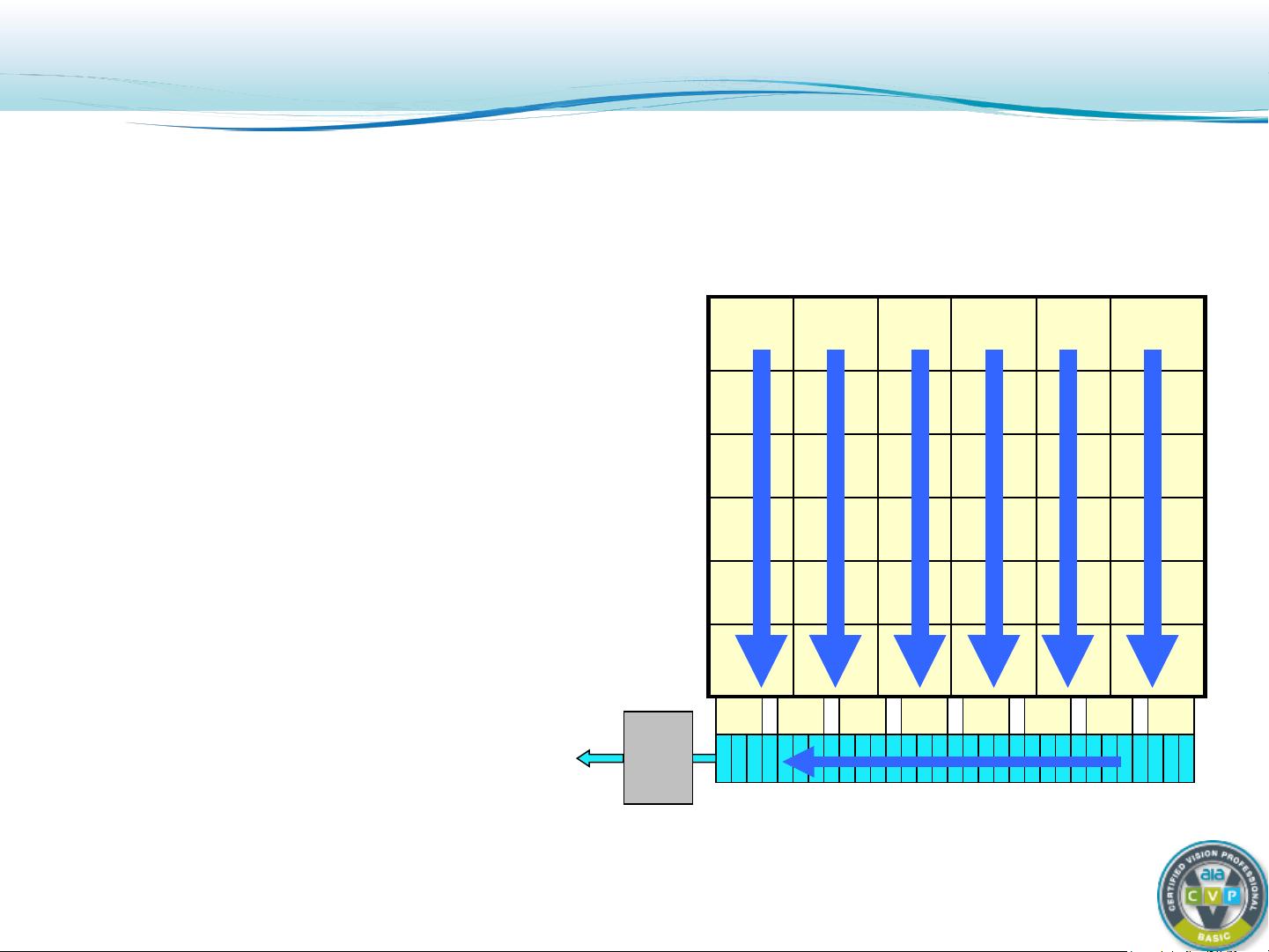
Pixel Out
Horizontal Shift-Register
Horizontal lines are shifted down the
sensor. Pixels are read out from a
horizontal shift register through a
common circuit
Main Advantage:
Sensitivity, CMOS is surpassing
Fidelity
Main Disadvantage
Speed
*CCD: Charge-Coupled Device
CCD Imager
CCD and CMOS Sensors
剩余156页未读,继续阅读
2017-12-22 上传
2022-11-05 上传
2020-07-18 上传
2021-10-21 上传
2010-12-17 上传
2020-12-10 上传

Franklin
- 粉丝: 7646
- 资源: 59
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
