PID参数整定详解:控制规律与工程实践
PID参数的工程整定是自动控制系统设计中的关键环节,它直接影响着调节系统的性能和稳定性。本培训教材旨在介绍PID控制器(比例-积分-微分)的工程整定方法,这是一种广泛应用在工业生产过程控制中的调节器。PID控制器由比例、积分和微分三个部分组成,各自具有不同的控制作用。
1. **基本控制规律**
- **位式调节** (开/关式):通过全开或全关执行器快速响应偏差,常用于简单控制系统,如油箱恒温、水塔液位等,但过渡过程易产生振荡。
- **比例调节**:根据偏差大小调整输出,输出与输入偏差成比例,能迅速响应,但可能存在余差。适用于变化小、滞后小且允许一定余差的系统,如塔和储罐液位控制。
2. **PID参数整定**
- **比例(P)调节**:通过调整比例度δ来控制调节作用的强度,过强可能导致振荡。比例增益Kp决定了响应速度,比例度δ则是Kp的倒数。
- **积分(I)调节**:消除余差,输出与偏差累积作用时间成比例。积分作用持续到偏差为零,但过度积分可能导致超调。
- **微分(D)调节**:预测偏差变化趋势,有助于快速纠正,但对系统动态响应要求较高。
3. **复杂调节系统的参数整定**:针对多变量、非线性或有扰动的系统,整定更为复杂,需考虑多个参数的协调配合,可能需要采用自适应控制或专家系统辅助整定。
4. **实用指导**:教材提供具体步骤和案例分析,帮助读者理解如何根据实际工况选择合适的控制规律和PID参数,确保系统的稳定性和效率。
5. **附录**:包括各厂家DCS系统PID参数的统计资料,以及相关术语的解释,便于理解和应用不同制造商的控制系统。
整定PID参数是一项细致的工作,需要结合实际工艺过程和设备特性进行,以达到最佳的控制效果。通过学习和实践,工程师能够掌握PID参数整定的艺术,从而优化生产过程,提高设备效率和产品质量。
第一节 基本控制规律及其作用效果
在工业生产过程控制中,常用的基本调节规律大致可分为:
1 位式调节
也就是常说的开/关式调节,它的动作规律是当被控变量偏离给定值时,调节器的输出不
是最大就是最小,从而使执行器全开或全关。在实际应用中,常用于机组油箱恒温控制、水
塔以及一些储罐的液位控制等。在实施时,
只要选用带上、下限接点的检测仪表、位式调节器或 PLC、再配一些继电器、电磁阀、
执行器、磁力起动器等即可构成位式控制系统。因此,位式控制的过渡过程必然是一个持续
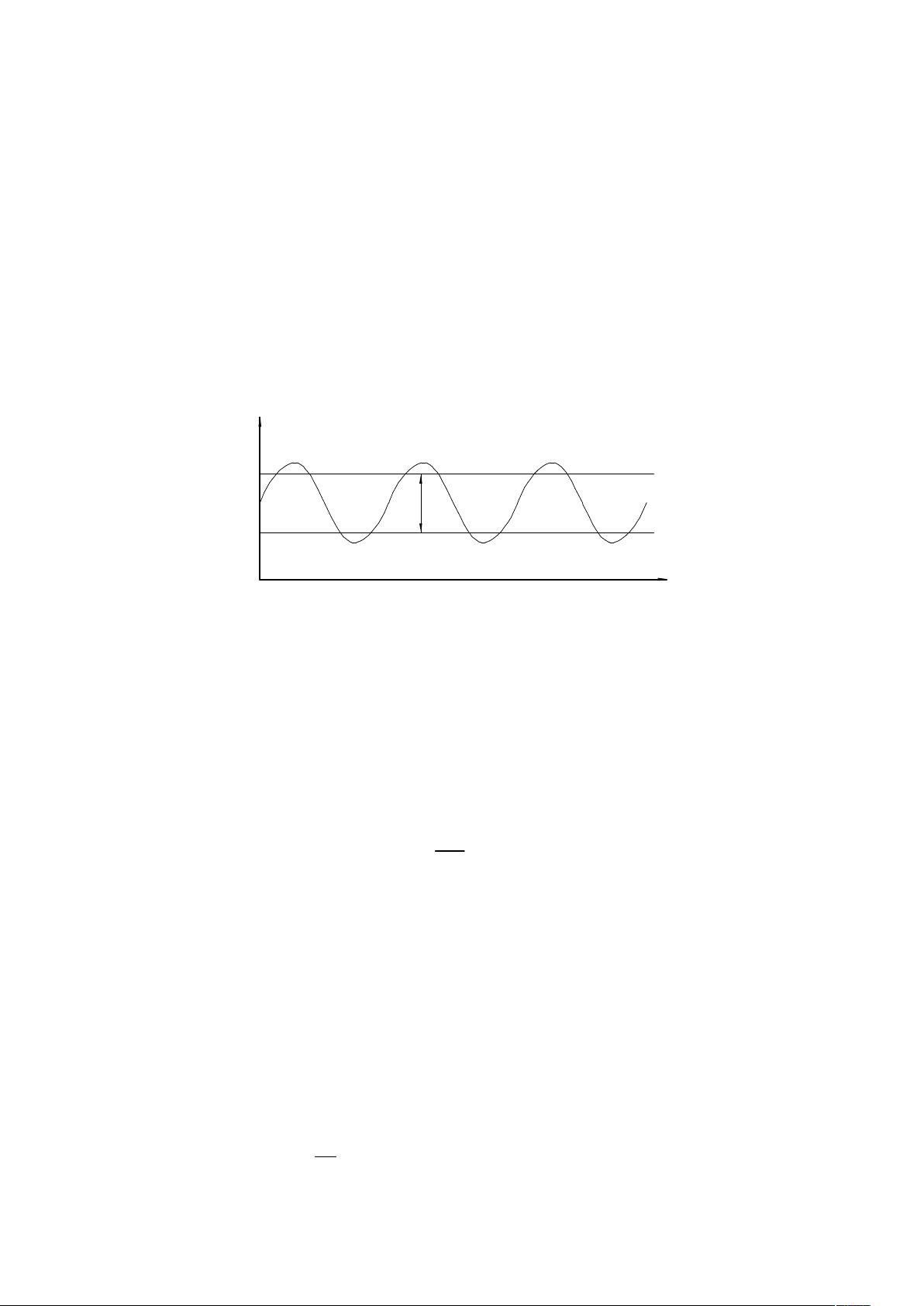
振荡的过程。如图 0 所示。
数
参
调
被
t
C
0
h
图 0 位式控制的过渡过程
2 比例调节
它依据“偏差的大小”来动作。它的输出与输入偏差的大小成比例,调节及时,有力,但
是有余差。用比例度 δ 来表示其作用的强弱,用%表示。例如比例度 60%,即表示当偏差为
量程的 60%时,输出变化值为量程的 100%。δ 越小,调节作用越强,调节作用太强时,会引
起振荡。比例调节作用适用于负荷变化小,对象纯滞后不大,时间常数较大而又允许有余差
的控制系统中,常用于塔和储罐的液位控制以及一些要求不高的压力控制中。使用时应注意 ,
当负荷变化幅度较大时,为了平衡负荷变化所需的调节阀开度变化也将较大,待稳定后,被
控变量的余差就可能较大。比例控制规律的动态方程为:
y( t )=Kp e ( t )=
1
δ
e( t )
其中:y(t)—— 输出变化量。
e(t)—— 输入变化量。
Kp —— 比例增益。
δ —— 比例度,它是 Kp 的倒数。
3 积分调节
它依据“偏差是否存在”来动作。它的输出与偏差对时间的积分成比例,只有当余差完全
消失,积分作用才停止。其实质就是消除余差。但积分作用使最大动偏差增大,延长了调节
时间。用积分时间 Ti 表示其作用的强弱,单位用分(或秒)表示。Ti 越小,积分作用越强,
积分作用太强时,也会引起振荡。积分控制规律的动态方程为:
y( t )=
1
T I
∫
e( t )dt
2
剩余10页未读,继续阅读
点击了解资源详情
370 浏览量
520 浏览量
150 浏览量
457 浏览量
135 浏览量
107 浏览量
240 浏览量

arisespring
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 革新操作体验:无需最小化按钮的窗口快速最小化工具
- VFP9编程实现EXCEL操作辅助软件的使用指南
- Apache CXF 2.2.9版本特性及资源下载指南
- Android黄金矿工游戏核心逻辑揭秘
- SQLyog企业版激活方法及文件结构解析
- PHP Flash投票系统源码及学习项目资源v1.2
- lhgDialog-4.2.0:轻量级且美观的弹窗组件,多皮肤支持
- ReactiveMaps:React组件库实现地图实时更新功能
- U盘硬件设计全方位学习资料
- Codice:一站式在线笔记与任务管理解决方案
- MyBatis自动生成POJO和Mapper工具类的介绍与应用
- 学生选课系统设计模版与概要设计指南
- radiusmanager 3.9.0 中文包发布
- 7LOG v1.0 正式版:多元技术项目源码包
- Newtonsoft.Json.dll 6.0版本:序列化与反序列化新突破
- Android实现SQLite数据库高效分页加载技巧
