Fork-Join实时任务图模型的NP-hardness与可调度算法研究
PDF格式 | 1MB |
更新于2024-07-15
| 2 浏览量 | 举报
本文档深入探讨了Fork-Join(FJ)实时任务图模型在实际应用中的可行性,特别是在调度复杂性方面。首先,作者关注于实时系统分析中的两个关键主题:分支代码建模和任务内部并行结构建模。FJ模型结合了这两个特性,将传统的有向图任务模型扩展到支持并发的fork(分支)和join(合并)操作。
核心研究内容聚焦于FJ实时任务模型在预抢占单处理器环境下的可调度性问题。作者证明了一个重要的理论结果,即对于FJ模型的 earliest deadline first (EDF) 调度策略,即使任务系统的利用率被严格限制在一个常数小于1的范围内,该问题依然属于强NP-hard问题。这表明,在一般情况下,解决这个问题的困难程度极高,不容易找到有效的全局最优解。
然而,文章并未止步于负面结论,而是进一步探讨了通过施加特定的结构限制来提升问题的可处理性。作者提出,当任务中的并行部分受到某些约束时,调度问题变得可计算,即可以通过一种具有伪多项式时间复杂度的精确调度测试来解决。这意味着,尽管整体上问题很硬,但在某些特定条件下,我们能够找到相对高效的方法。
因此,这项研究为FJ实时任务图模型的可行性和算法设计提供了一条边界线,即在保持模型表达力的同时,如何通过适当的结构调整和优化策略来降低调度问题的复杂性。这对于理解和设计实时系统的调度算法具有重要的理论价值,也为工程实践中如何选择合适的模型和方法提供了指导。
TECS1501-14 ACM-TRANSACTION January 2, 2016 10:1
14:6 J. Sun et al.
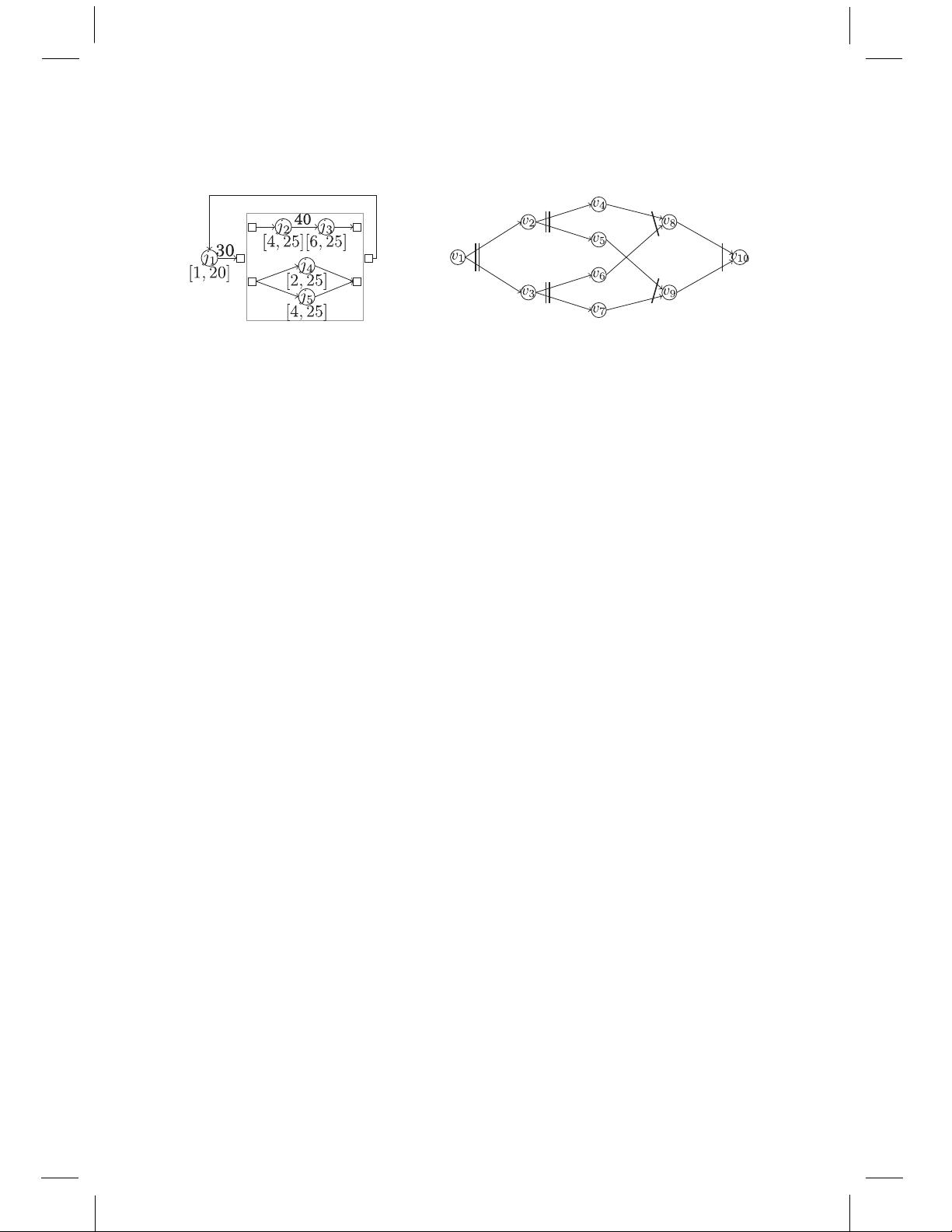
Fig. 3. An example CRT task τ .
Fig. 4. An example FJRT task that cannot be ex-
pressed by a CRT model.
model into a regular substructure of the hypergraph, which can subsequently be used205
to construct an equivalent FJRT model for the original CRT model. Finally, we present206
the counterexample of t he parallel task that can be expressed by the FJRT model but207
cannot be expressed by the CRT model.208
Definition 2.5 (Concurrent Real-Time Task System [Ejsing-Duun et al. 2013]). A209
Concurrent Real-Time Task System (CRT) S isatupleS = (τ, J, e, d), where210
—J is a finite set of jobs,211
—e: J → N is a mapping from jobs to worst-case execution times,212
—d: J → N is a mapping from jobs to relative deadlines, and213
—τ is a configuration defined by the following grammar.214
—Configuration: τ ::= T | T τ215
—Task: T ::= j | T
1
xT
2
| S
1
S
2
| T
1
+ T
2
| T
ω
216
—Subtask: S ::= j | S
1
xS
2
| S
1
S
2
| S
1
+ S
2
217
Here, j ∈ J is a job and x ∈ N, T
1
xT
2
is the sequential composition of tasks T
1
and218
T
2
, with interrelease time x, T
1
+ T
2
is the choice between tasks T
1
and T
2
, S
1
S
2
is219
the parallel composition of subtasks S
1
and S
2
,andT
ω
is one or more iterations of T .220
In contrast to the definition of our FJRT model, the CRT model is inductively defined221
by some regular grammar. The grammar of the configuration defines the task system,222
which can be viewed as a composition of arbitrarily many independent tasks running in223
parallel (intertask parallelism). Moreover, a nondeterministic choice between different224
execution paths or subtasks running in parallel can be expressed by the grammar of225
tasks and subtasks. Note that the subtasks defined in the CRT are restricted to not226
include any cycles. This article considers only acyclic parallel subtasks in the FJRT227
model.228
Example 2.6. Figure 3 represents the CRT task τ = ( j
1
30(( j
2
40 j
3
)( j
4
+ j
5
)))
ω
,229
where e( j
1
) = 1, d( j
1
) = 20; e( j
2
) = 4, d( j
2
) = 25; e( j
3
) = 6, d( j
3
) = 25; e( j
4
) =230
2, d( j
4
) = 25; and e( j
5
) = 4, d( j
5
) = 25. As shown in Figure 3, the vertices in the231
graph represent jobs, each labeled with an execution time and a deadline. The arcs in232
the graph represent dependencies between jobs and are labeled with their minimum233
interrelease time.234
The combination of Theorem 2.7 and Example 2.8 proves that our digraph-based235
FJRT model is more expressive than the CRT models.236
THEOREM 2.7. The FJRT model is at least as expressive as the CRT model.237
PROOF. We prove by induction that each grammar rule listed in Definition 2.5 can238
be fully expressed by a substructure of the hypergraph. We do this by first introducing239
the prefix and suffix operations for tasks, as follows.240
ACM Transactions on Embedded Computing Systems, Vol. 15, No. 1, Article 14, Publication date: December 2015.
剩余28页未读,继续阅读
相关推荐






weixin_38747126
- 粉丝: 5
- 资源: 921
 我的内容管理
展开
我的内容管理
展开







最新资源
- 大酒店员工手册
- xoak-feedstock:一个xoak的conda-smithy仓库
- 文件夹
- 易语言源码易语言使用脚本开关系统还原源码.rar
- SleepDisplay:命令行工具可让您的Mac显示器直接进入睡眠状态
- Papara Excel İşlem Özeti-crx插件
- python程序设计(基于网络爬虫的电影评论爬取和分析系统)
- OlaMundo:Primeiro存储库
- 零售业管理:价格策略
- 投资组合
- java笔试题算法-Complete-Striped-Smith-Waterman-Library:Complete-Striped-Smit
- ros_arm_control.7z
- tripitaka:Tripitaka的依赖性很低,没有针对Node.js的简洁记录器
- 以品类管理为导向的连锁企业管理功能重组
- 长颈鹿
- 三菱Q系列PLC选型工具软件.zip
