智能汽车轨迹控制:车辆运动学与动力学模型解析
需积分: 0 116 浏览量
更新于2024-08-05
4
收藏 3.05MB PDF 举报
"本资源是关于智能汽车路径规划与轨迹跟踪的系列算法讲解,重点聚焦在车辆的运动学和动力学模型。课程由Ally于2021年3月1日创作,内容涵盖了轨迹跟踪控制算法。车辆运动学模型被视为刚体,只考虑位姿、速度和前轮转角等关系,而动力学模型则涉及力的影响,如轮胎侧偏。在建模时,通常通过状态空间方程来输入控制量并得到期望状态。车辆模型分为运动学模型(如自行车模型,假设二维平面运动、轮胎转速相同等)和动力学模型。车辆运动学方程描述了车辆的位置、速度和转向角之间的关系,并可以通过泰勒级数展开进行简化分析。"
在智能汽车领域,理解和建立车辆的运动模型至关重要,这关乎到路径规划和轨迹跟踪的精确性。车辆运动学模型是基础,它将车辆视为一个没有形变的刚体,主要关注车辆的位置坐标(X, Y)、航向角(θ)、速度(v)以及前轮转角(δ)。这个模型忽略了车辆内部的力作用,简化了问题,便于分析和控制。
车辆动力学模型则更复杂,它考虑了车辆与地面交互的力,如轮胎侧偏力,这对高速行驶或复杂路况下的控制尤其关键。动力学模型能够更准确地模拟车辆的实际行为,但计算和控制难度相对较大。
在构建这些模型时,常用的方法是建立状态空间方程,输入如油门、刹车或转向信号等控制量,以期望达到特定的位置、速度或角度。对于运动学模型,常采用自行车模型,这是一种简化模型,假设车辆在Z轴方向没有运动,左右轮胎转速和转向角相同,车身和悬架系统刚性,且由前轮驱动。
车辆运动学方程描述了车辆状态随时间的变化,这些方程可以用来预测车辆未来的位置和方向。例如,选取状态量为位置(X, Y)、航向角(θ)和速度(v),控制量为前轮转角(δ),然后根据参考轨迹的参考点(r)调整这些变量。通过泰勒级数展开,可以近似求解车辆在接近参考点时的行为,这对于轨迹跟踪控制算法的设计非常有用。
在实际应用中,这些模型和算法通常借助MATLAB等工具进行仿真和优化,以实现高效且精确的路径规划和轨迹跟踪。通过深入理解车辆的运动学和动力学特性,工程师可以设计出更智能、更安全的自动驾驶系统。
2021/3/1
轨迹跟踪控制算法——车辆运动学和动力学模型
4
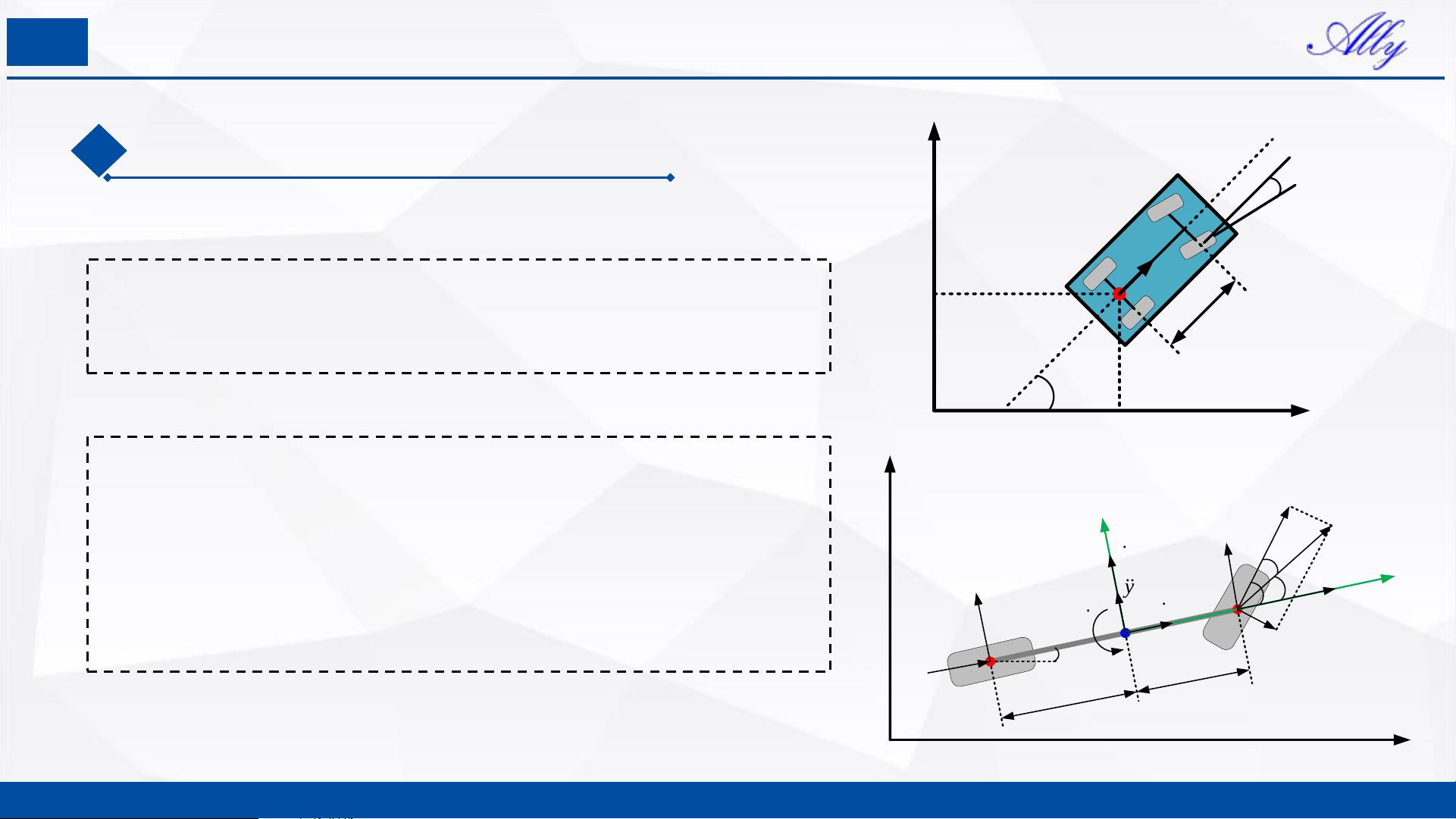
车辆运动学模型( Kinematic Model )把车辆完全视为刚体,主要考虑车
辆的位姿(位置坐标、航向角)、速度、前轮转角等的关系,不考虑任何
力的影响。
车辆动力学模型( Dynamic Model )则需要考虑车辆和地面之间的力的
影响,包括轮胎侧偏现象等。
在建立两种模型时,思路都是通过建立状态空间方程,以便于输入控制量
得到理想的状态值;并且一般都建立为基于误差(位置误差、航向误差等
)的状态空间方程。
车辆运动学模型和动力学模型概述
要控制车辆的运动,首先要对车辆的运动建立数字化模型,模型建立的越
准确,对车辆运动的描述越准确,对车辆的跟踪控制的效果就越好。除了
真实反映车辆特性外,建立的模型也应该尽可能的简单易用。车辆模型一
般分为运动学和动力学模型。
,xy
X
Y
l
v
xf
F
yf
F
lf
v
f
v
cf
v
x
f
vf
f
l
x
y
y
y
vr
r
l
X
Y
yr
F
xr
F
剩余13页未读,继续阅读
1252 浏览量
2694 浏览量
107 浏览量
2051 浏览量
144 浏览量
2021-09-09 上传
2023-10-28 上传
2021-11-23 上传

yxldr
- 粉丝: 24
- 资源: 326
 我的内容管理
展开
我的内容管理
展开







最新资源
- playbooks:Ansible 剧本
- 都市之夜日志动态网页模板
- abra:协作云CLI的Github镜像。 随时提出问题并发送变更集,我们的目标是及时做出回应
- xun xian shi zhong ke -crx插件
- SemaphoreSlim,SemaphoreSlim【可联系作者购买】
- nodejs-intro
- 动态日志切换展示响应式网页模板
- wodapp-backend
- TCP.IP终端程序源代码
- 运用HTML、CSS、JavaScript基础制作页面
- tweetmvc-core:TweetMVC [已弃用] - 见 jeremeamiamu
- rougelike:使用C ++ 11和termbox编写的Rougelike游戏
- Browser Information-crx插件
- Honey-Website:营养应用程序Honey的一页行销网站
- 内裤
- 功能强大的弹窗(WIN 7透明效果)
