移动机器人最优路径规划:特殊遗传算法的创新解决方案
30 浏览量
更新于2024-08-28
收藏 299KB PDF 举报
本文探讨了一种专为移动机器人最优路径规划设计的特殊遗传算法,旨在解决在复杂环境中的导航问题。针对移动机器人特有的挑战,如动态障碍、实时决策和有限计算能力,研究者提出了创新性的解决方案。
首先,算法的核心在于障碍避免策略。通过引入障碍生成机制,算法能够生成一组高效的初始种群,这些种群包含了可能的路径选项,使机器人能够避开预设的障碍物。这种策略考虑了机器人的物理限制和环境约束,确保了路径的可行性。
接着,遗传操作被优化以适应路径规划任务。文中采用了领域启发式的知识驱动的交叉和变异操作。这些操作基于对路径规划问题的理解,能够更有效地传递有益的信息,促进种群的进化,从而找到更优解。此外,一种自适应调整机制结合了模糊逻辑控制,允许算法在执行过程中动态地调整交叉和变异的概率,以应对不同复杂度的环境。
为了验证算法的有效性,研究者进行了模拟实验,包括离线和在线计划,其中静态障碍被用来评估算法的性能。结果表明,这种方法在搜索速度和路径质量方面表现出色,相比已有的相关技术,其在解决路径规划问题时具有显著的优势。这表明该算法在实际应用中能提供高效且精准的路径规划,对于提高移动机器人在复杂环境中的自主导航能力具有重要意义。
这项工作通过将遗传算法、障碍避免策略和模糊逻辑控制相结合,为移动机器人领域的最优路径规划提供了一个强大的工具。它不仅提升了路径规划的效率,还考虑了机器人在实时环境中的动态适应性,为未来的自主机器人技术发展奠定了坚实的基础。
paths might become feasible solutions after certain
genetic operations, they cause several problems. First,
a penalty term is needed to append to the fitness
function in order to distinguish feasible and infeasible
paths, which will inevitably increase the computation
load and decrease the search speed. Secondly, most of
the genetic operations to the infeasible paths are
meaningless. For instance, the crossover of two
infeasible individuals can hardly generate a feasible
one. Thirdly, some special genetic operators need to be
designed for these infeasible individuals. For example,
node-repair and line-repair operators in reference [8]
are specifically designed for repairing the infeasible
paths.
2.2.2 The obstacle avoidance algorithm. An obstacle
avoidance algorithm is proposed in this paper for
generating the first population. The proposed algorithm
consists of the following steps as illustrated in Fig. 2.
Y
A
X
B
Fig. 2
Diagram for the obstacle avoidance
algorithm
Step 1: Draw a line segment XY from the start node
X to the goal node Y.
Step 2: If XY intersects an obstacle area O, continue;
otherwise output XY as the shortest path.
Step 3: Select randomly one node A in the obstacle
area O and on XY and then draw an orthogonal line
(either right or left side) to XY from node A. If the
orthogonal line intersects a free area F, select one node
B in F randomly; otherwise stop.
Step 4: Connect nodes X and B, as well as nodes B
and Y.
Step 5: Replace B with Y in line segment XB and B
with X in line segment BY.
Step 6: Repeat steps 1 to 5 until none of the line
segments from X to Y intersects any obstacle area.
Step 7: A collision-free initial path is then generated
and encoded by the series of grid numbers of the line
segments from X to Y.
It should be noted that every orthogonal line from
one obstacle areas should be drawn to the same side
(right or left) as shown in Fig. 2.
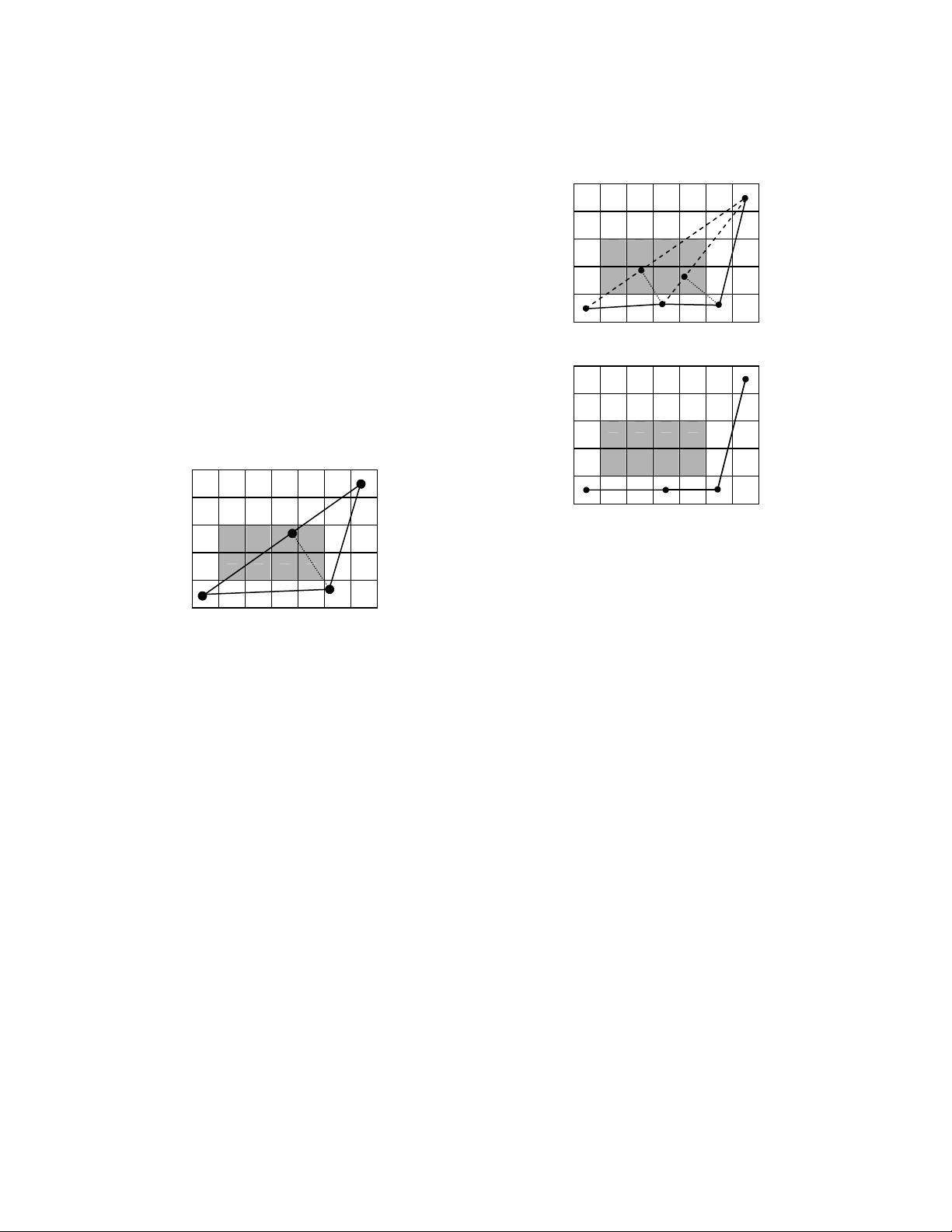
Example: A 7×5 environment with one obstacle area,
as shown in Fig. 3, is used to illustrate the generation
process of initial paths. Here node 0 is the start node
and node 34 is the goal node.
28 29 30 31 32 33 34
21 22 23 24 25 26 27
14 15 16 17 18 19 20
7 8 9 10 11 12 13
0 1 2 3 4 5 6
(a) Generation process
28 29 30 31 32 33 34
21 22 23 24 25 26 27
14 15 16 17 18 19 20
7 8 9 10 11 12 13
0 1 2 3 4 5 6
(b) The final path
Fig. 3
Example of initial path generation with
consideration of one obstacle area
At first, a line segment between node 0 and node 34
is drawn, and it intersects with the obstacle area. Then
node 9 is selected randomly and an orthogonal line to
the right side from node 9 is produced. The orthogonal
line intersects the free area at node 3. As the line
segment between nodes 3 and 34 still intersects the
obstacle area, node 3 is set as the start node and node
34 as the goal node, and the above process is repeated.
After that, two line segments (one is between node 3
and node 5, the other is between node 5 and node 34)
are generated, and they no longer intersect the obstacle
area. Hence a collision-free initial path (0, 3, 5, 34) is
produced, as shown in Fig. 3(b).
Different initial paths could be generated as there are
various choices of intersection nodes in the obstacle
area or free area and the side (right or left) of the
orthogonal line.
If many obstacles exist in mobile robot environment,
we can separate the whole generation process with
multi-obstacles into several generation processes with
one obstacle each so that we can apply the obstacle
avoidance algorithm without any changes. Here is an
example.
Fig. 4 is a 10×10 grid environment with five
obstacles, with node 0 as the start node and node 99 as
the goal node. At first, a line segment between node 0
and node 99 is drawn, and it intersects the free area at
node 33 and node 44. Each node in the free area can be
剩余10页未读,继续阅读
2010-06-07 上传
2021-08-14 上传
2021-08-14 上传
点击了解资源详情
点击了解资源详情
2019-03-09 上传
2021-09-18 上传
2023-04-23 上传
2021-08-13 上传

weixin_38650150
- 粉丝: 5
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
