库卡机器人通讯协议详解
需积分: 50 14 浏览量
更新于2024-08-05
3
收藏 766KB PDF 举报
"库卡机器人之通讯总结.pdf"
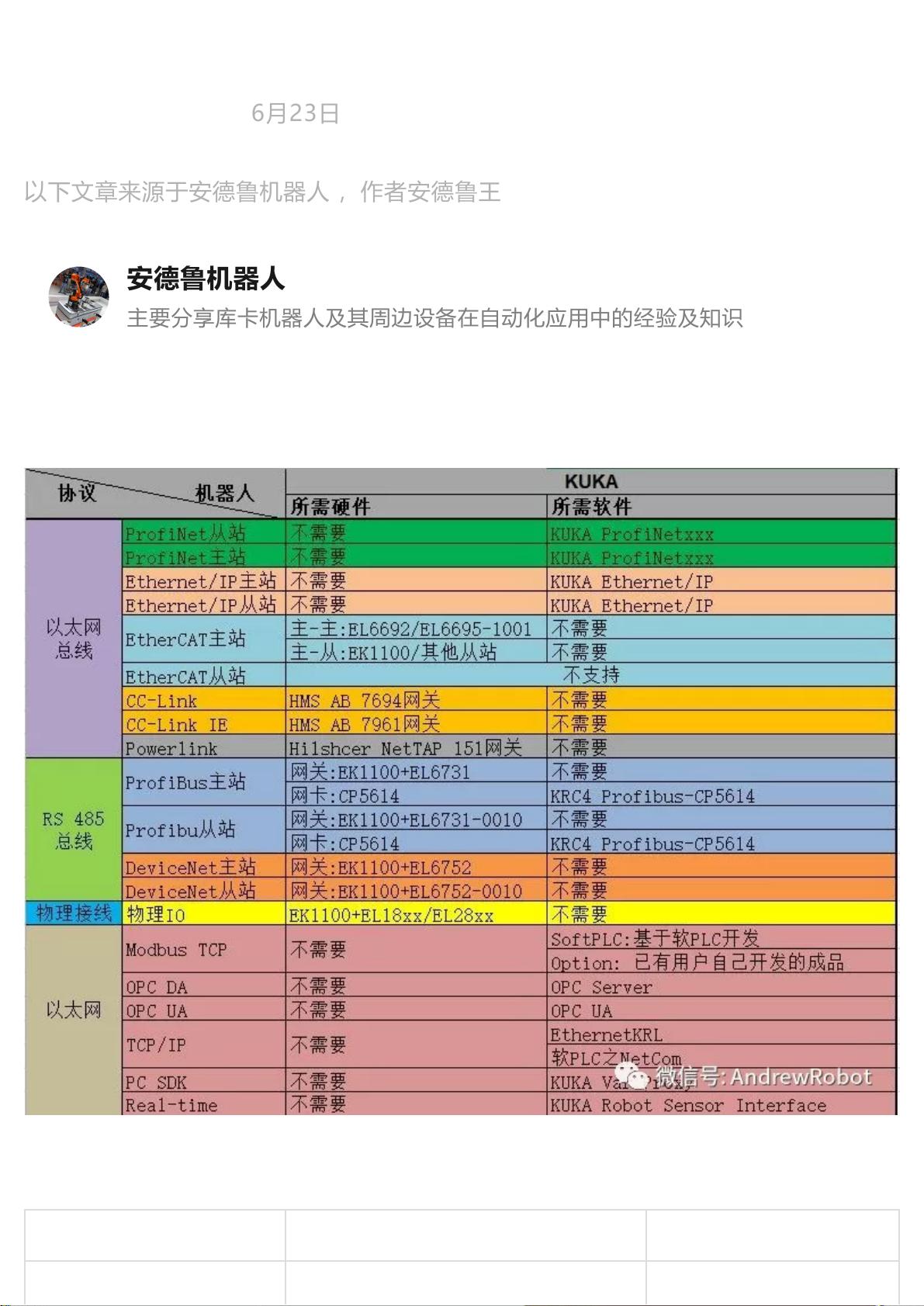
本文详细介绍了库卡机器人(KUKA)在自动化应用中的通信方式,主要包括基于以太网的现场总线、RS485的现场总线、物理接线以及以太网通讯四种类型。以下是对这些通信方式的深入解析:
1. **基于以太网的现场总线:**
- **ProfiNet**:库卡机器人可作为ProfiNet从站,无需额外组件。同时,它也能作为主站,但需配合KUKA的相应产品。
- **Ethernet/IP**:库卡机器人支持作为主站和从站,同样无需特殊组件。
- **EtherCAT**:库卡机器人可以作为主-主和主-从站,主-主模式下需要EL6692/EL6695-1001,主-从模式下则需EK1100或其他从站模块。但库卡不支持作为 EtherCAT 从站。
- **CC-Link** 和 **CC-Link IE**:库卡机器人可通过特定网关(如HMS AB7694和HMS AB7961)实现与这些总线的连接。
- **Powerlink**:通过Hilscher NetTAP151网关连接。
2. **RS485的现场总线:**
- **ProfiBus**:库卡机器人能作为主站和从站,主站需要EK1100+EL6731网关和可能的CP5614网卡,从站也需要EK1100+EL6731-0010。
- **DeviceNet**:库卡机器人同样支持主站和从站角色,分别需要EK1100+EL6752网关。值得注意的是,自KRC4开始,库卡不再支持RS232串口通讯。
3. **物理接线:**
- **物理IO**:库卡机器人可以通过EK1100+EL18xx/EL28xx进行物理输入/输出连接,特别适用于compact控制柜。
4. **以太网通讯:**
- **ModbusTCP**:库卡机器人可以直接支持,无需额外组件。
- **SoftPLC**:用户可以根据需求基于软PLC进行开发。
- **OPCDA** 和 **OPC UA**:库卡机器人支持这两种标准的工业通讯协议,无需专用服务器。
- **TCP/IP**:通过库卡的NetCom功能,可以实现基于TCP/IP的通讯。
- **PCSDK**:库卡提供了PC软件开发套件,便于开发者构建与机器人的通讯解决方案。
库卡机器人具备广泛的通信能力,能够适应各种自动化环境,无论是标准的以太网总线,还是传统的RS485现场总线,甚至是物理接线和以太网通讯,都提供了相应的接口和解决方案。这对于在不同系统集成中的灵活运用至关重要。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-05-18 上传
2021-06-05 上传
2021-09-29 上传
2022-06-17 上传
183 浏览量
2022-06-18 上传

长门长门长门长门
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
