HALCON 三维机器视觉方法概览:从摄像机校准到三维重建
需积分: 50 80 浏览量
更新于2024-07-24
收藏 11.87MB PDF 举报
HALCON 三维机器视觉方法介绍
HALCON 三维机器视觉方法是基于机器视觉技术的三维成像和处理技术。该技术通过使用摄像机和光学系统来获取三维图像,然后使用各种算法和技术来处理和分析这些图像,以获取三维空间中的信息。
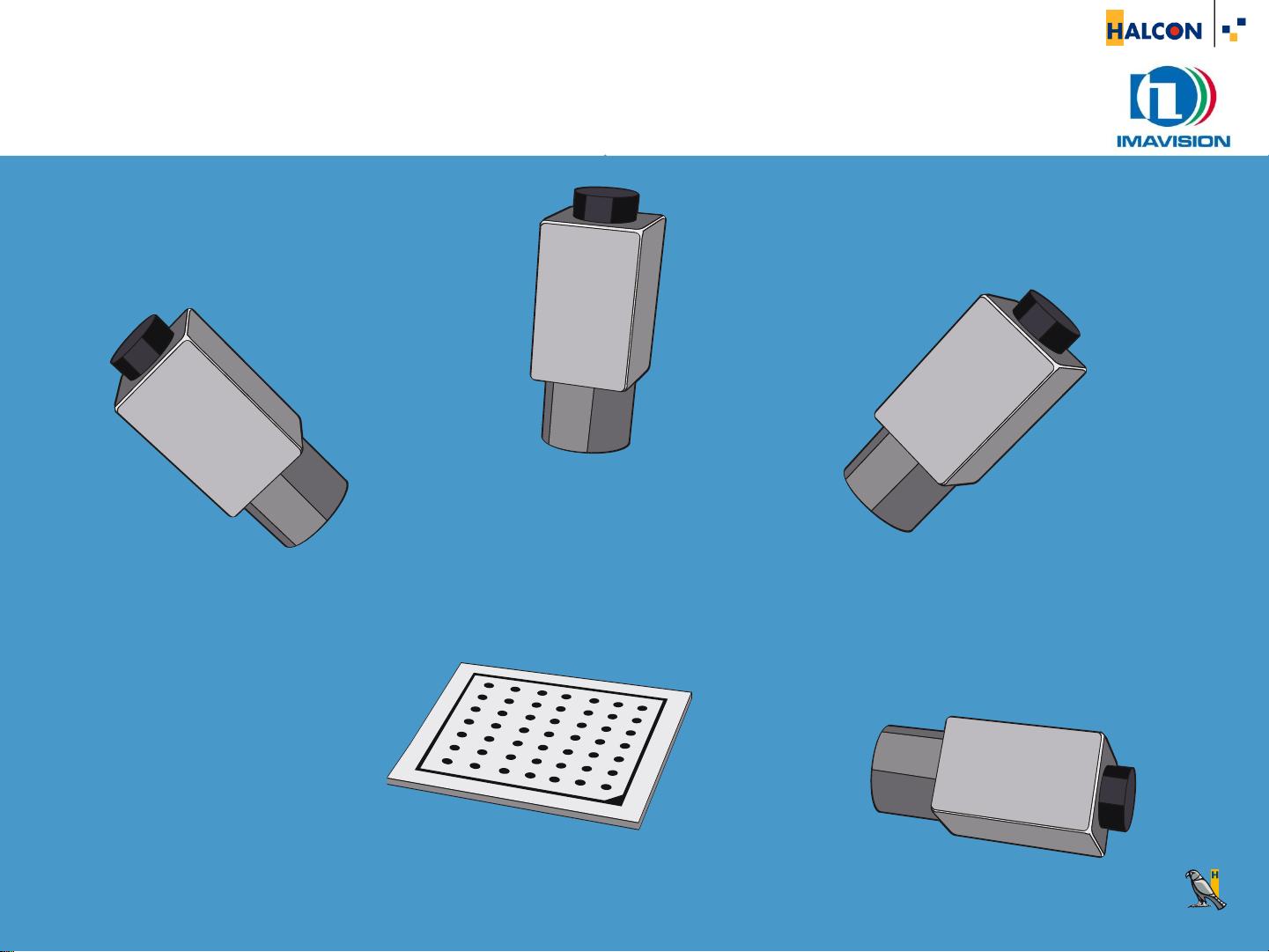
在 HALCON 三维机器视觉方法中,Camera Calibration 是一个非常重要的步骤。Camera Calibration 的目的是为了确定摄像机的内参数和外参数,以便在后续的图像处理和分析中使用。Self-calibration 是一种特殊的 Camera Calibration 方法,它可以在不需要任何外部信息的情况下对摄像机进行标定。
Hand-eye Calibration 是另一种重要的技术,它可以将机器人或其他设备的运动与摄像机的视觉信息相匹配,以便实现机器人的自动化和智能化。
Rectification 和 2D Measurement 是 HALCON 三维机器视觉方法中的两个重要步骤。Rectification 的目的是为了将图像中的畸变和扭曲矫正,而 2D Measurement 则是为了从图像中提取二维信息。
Pose Estimation 是 HALCON 三维机器视觉方法中的一个关键步骤,它可以确定对象在三维空间中的位置和姿态。Pose Estimation 可以使用各种算法和技术,例如基于形状的匹配和基于表面的匹配等。
3D Matching 是 HALCON 三维机器视觉方法中的一个重要技术,它可以将不同的图像和三维模型匹配起来,以便实现三维重建和对象识别。3D Matching 可以使用各种算法和技术,例如基于表面的匹配和基于形状的匹配等。
Pose from Rectangles or Circles 是一种特殊的 Pose Estimation 方法,它可以使用矩形或圆形的对象来确定其在三维空间中的位置和姿态。
Reconstruction 是 HALCON 三维机器视觉方法中的一个重要步骤,它可以将不同的图像和三维模型组合起来,以便实现三维重建和对象识别。
Sheet-of-light 方法是一种特殊的三维成像技术,它可以使用激光或其他光源来照亮对象,并将其投影到图像上,以便实现三维重建和对象识别。
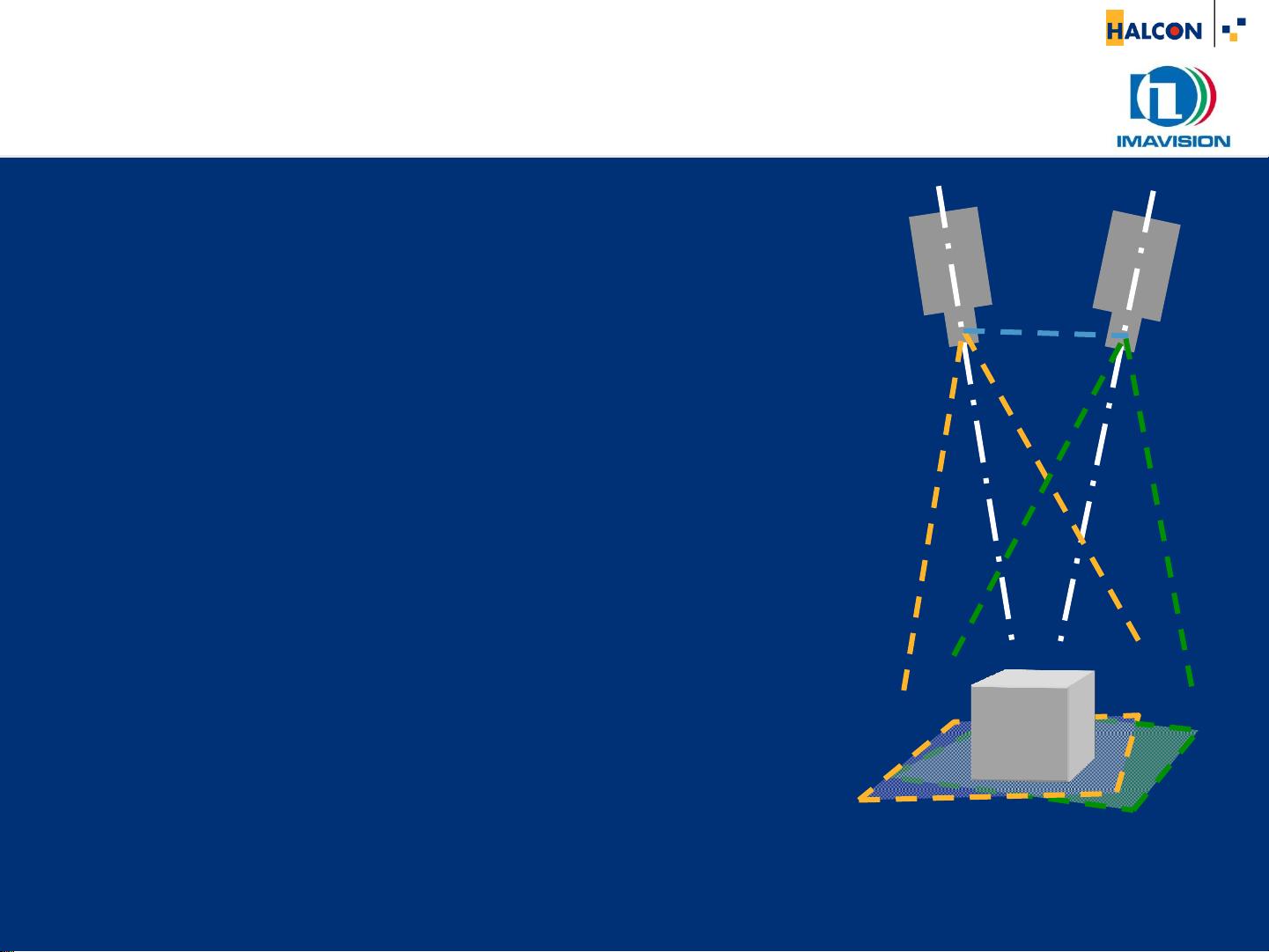
Binocular and Multi-view Stereo 是 HALCON 三维机器视觉方法中的两个重要技术,它们可以使用多个摄像机来获取三维图像,并将其组合起来,以便实现三维重建和对象识别。
Depth from Focus 是一种特殊的三维成像技术,它可以使用摄像机的焦距信息来计算对象的深度信息。
3D Object Processing 是 HALCON 三维机器视觉方法中的一个重要步骤,它可以对三维对象进行处理和分析,以便实现对象识别和分类。
3D Surface Comparison 是 HALCON 三维机器视觉方法中的一个重要技术,它可以将不同的三维对象进行比较,以便实现对象识别和分类。
3D Registration 是 HALCON 三维机器视觉方法中的一个重要步骤,它可以将不同的三维对象进行注册,以便实现对象识别和分类。
Triangulation 是 HALCON 三维机器视觉方法中的一个重要技术,它可以使用三角测量法来计算对象的三维信息。
3D Primitive Fitting 是 HALCON 三维机器视觉方法中的一个重要技术,它可以使用基本形状来拟合三维对象,以便实现对象识别和分类。
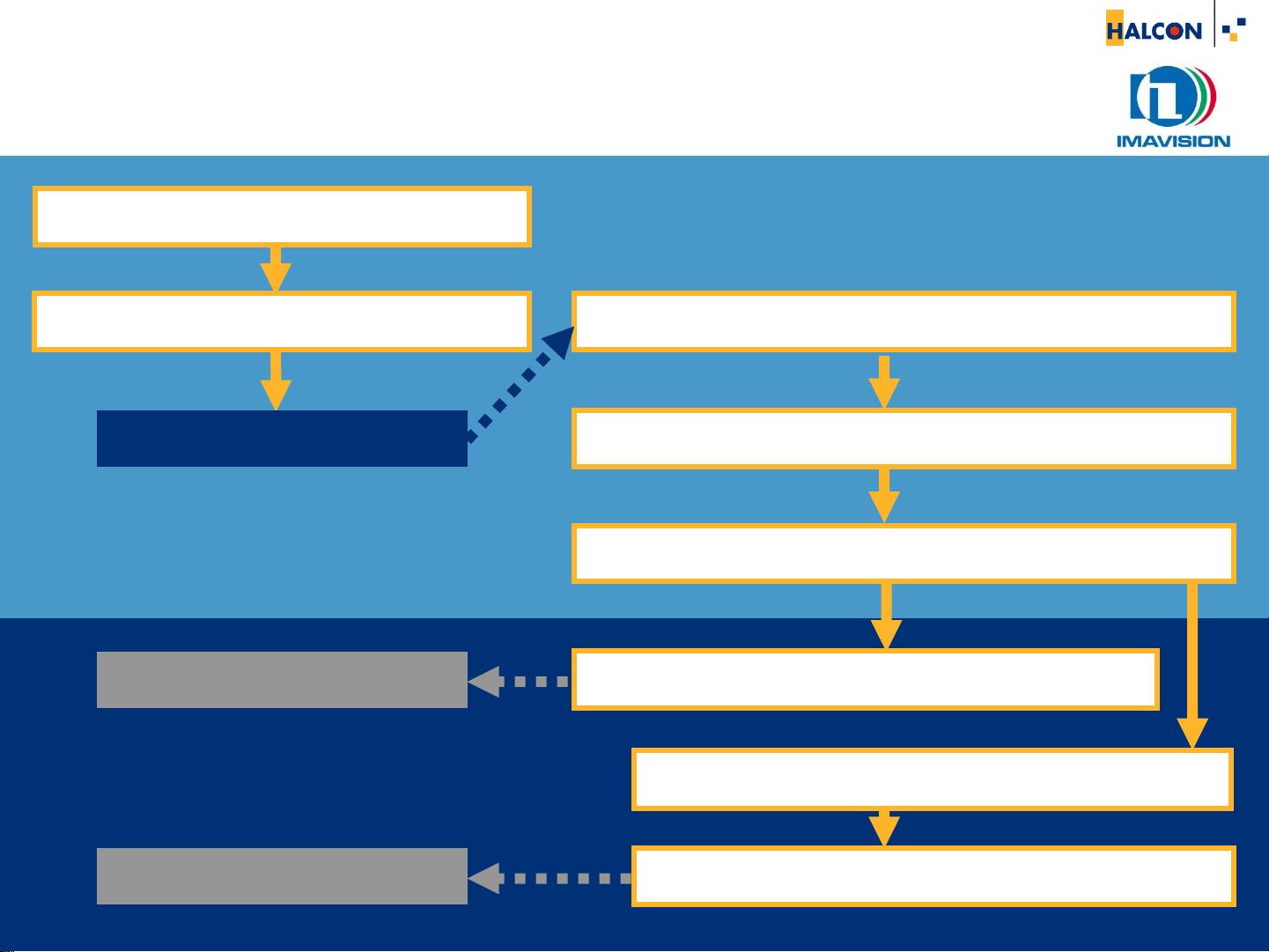
HALCON 三维机器视觉方法提供了多种不同的解决方案,以满足不同的应用需求。例如,Select Your Solution: 3D Methods I 可以根据对象的高度和深度信息来选择合适的三维机器视觉方法,而 Select Your Solution: 3D Methods II 则可以根据对象的几何信息和表面信息来选择合适的三维机器视觉方法。
HALCON 三维机器视觉方法是一个功能强大且灵活的技术,它可以满足各种不同的应用需求,并提供了多种不同的解决方案以满足不同的应用场景。
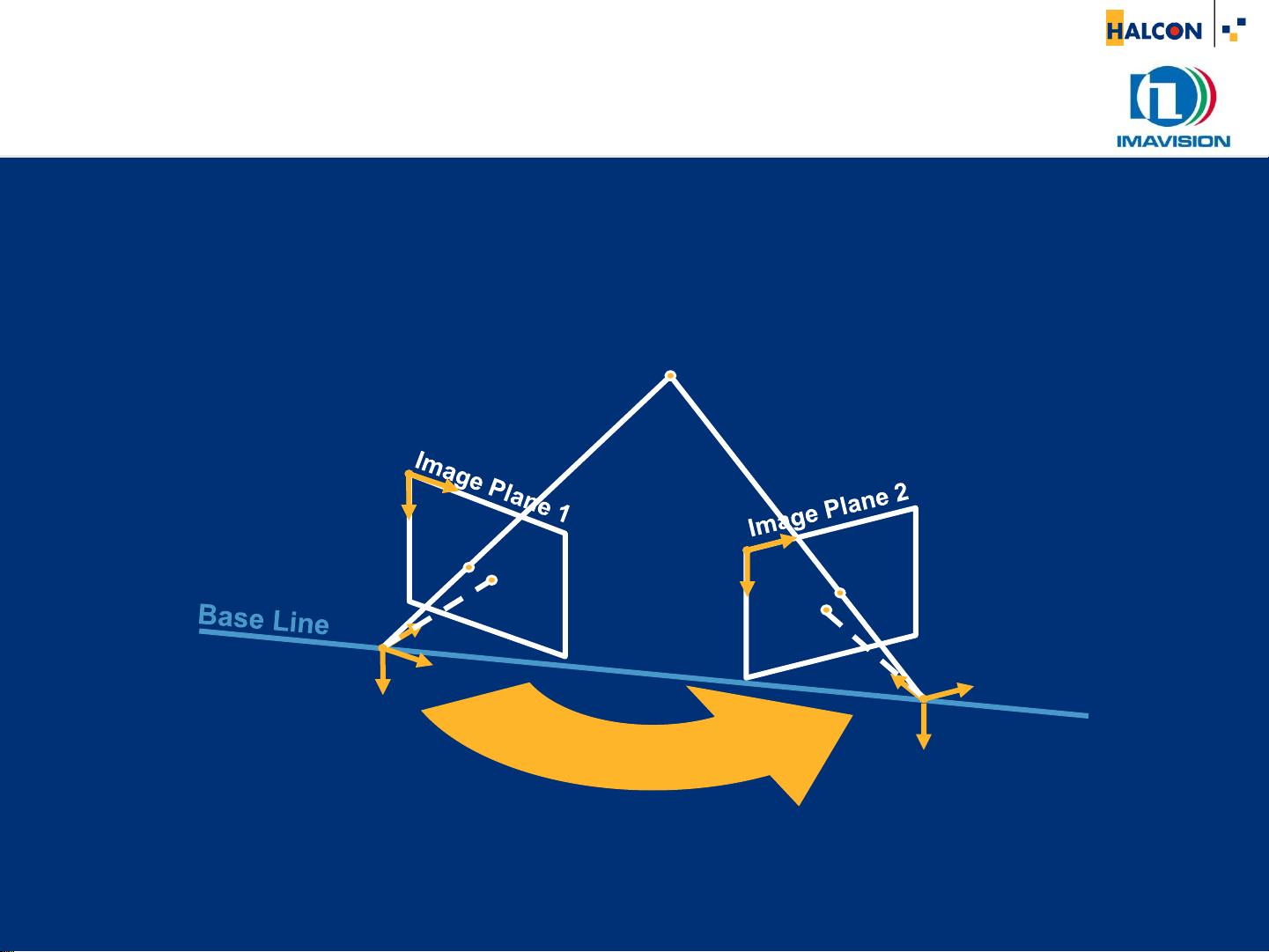
Idea of Binocular Reconstruction
Geometry of a binocular stereo set-up
Known image point correspondence
Known camera parameters
Reconstruct world point by
triangulation
Relative Camera Pose
R
r
, T
r
Camera 1
Camera 2
P
w
P
1
P
2
O
1
O
2
C
1
C
2
P
w
: world point
P
i
: image point
C
i
: principal point
O
i
: origin of camera
coordinate system
剩余181页未读,继续阅读
2020-03-10 上传
129 浏览量
2019-12-26 上传
2012-11-28 上传
点击了解资源详情
2022-06-14 上传
2010-08-13 上传

RoyFang
- 粉丝: 4
- 资源: 49
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
