51单片机PID算法详解及应用
需积分: 3 69 浏览量
更新于2024-07-31
收藏 400KB DOC 举报
"51单片机PID算法程序的学习资料,包含比例、积分、微分的控制原理及其在单片机中的应用"
51单片机PID算法程序是用于精确控制各种物理参数,如温度、压力、流量等的一种常用方法。PID算法基于偏差的三个组成部分:比例(P)、积分(I)和微分(D),通过调整这三者的权重来实现对系统动态行为的优化控制。
1. 比例(P)控制:比例控制是最基本的控制方式,它的输出与输入偏差成正比。比例控制能够快速响应误差,但仅靠比例控制无法消除稳态误差,因为当期望值改变时,系统会产生一个固定的稳态误差。比例放大系数的增大会增加系统的响应速度,但也可能导致系统不稳定。
2. 积分(I)控制:积分控制引入了对误差时间积累的考虑,其输出与误差的积分成正比。随着时间的推移,积分项会逐渐增大,从而逐渐减少稳态误差直至消除。然而,单独使用积分控制会导致调节响应慢,可能降低系统的稳定性。
3. 微分(D)控制:微分控制关注的是误差的变化率,即误差的微分。它有助于提前预测并减少未来的误差,提供超前控制,从而改善系统的动态性能。对于具有大惯性或滞后特性的系统,微分控制尤其有用,可以减少超调和振荡。
在实际应用中,PID控制器通常采用比例积分(PI)或比例积分微分(PID)形式,以获得更好的控制效果。PI控制器结合了比例和积分的优点,能够消除稳态误差同时提供较快的响应。PID控制器则进一步加入了微分项,增强了系统的预见性和抗干扰能力,使得控制更加精准和平稳。
51单片机因其结构简单、性价比高,常被用于教育和小型工程项目的控制任务。在51单片机上实现PID算法,需要编程将上述理论转化为实际的控制逻辑,通过调整PID参数(Kp、Ki、Kd)来达到理想的控制效果。在编写程序时,需要考虑到硬件限制和实时性要求,确保算法的执行效率和稳定性。
学习51单片机的PID算法程序是掌握自动化控制基础的重要步骤,它涵盖了误差处理、系统响应优化和实时控制策略等多个关键概念。通过理解和实践,开发者可以设计出更高效、更精确的控制系统。
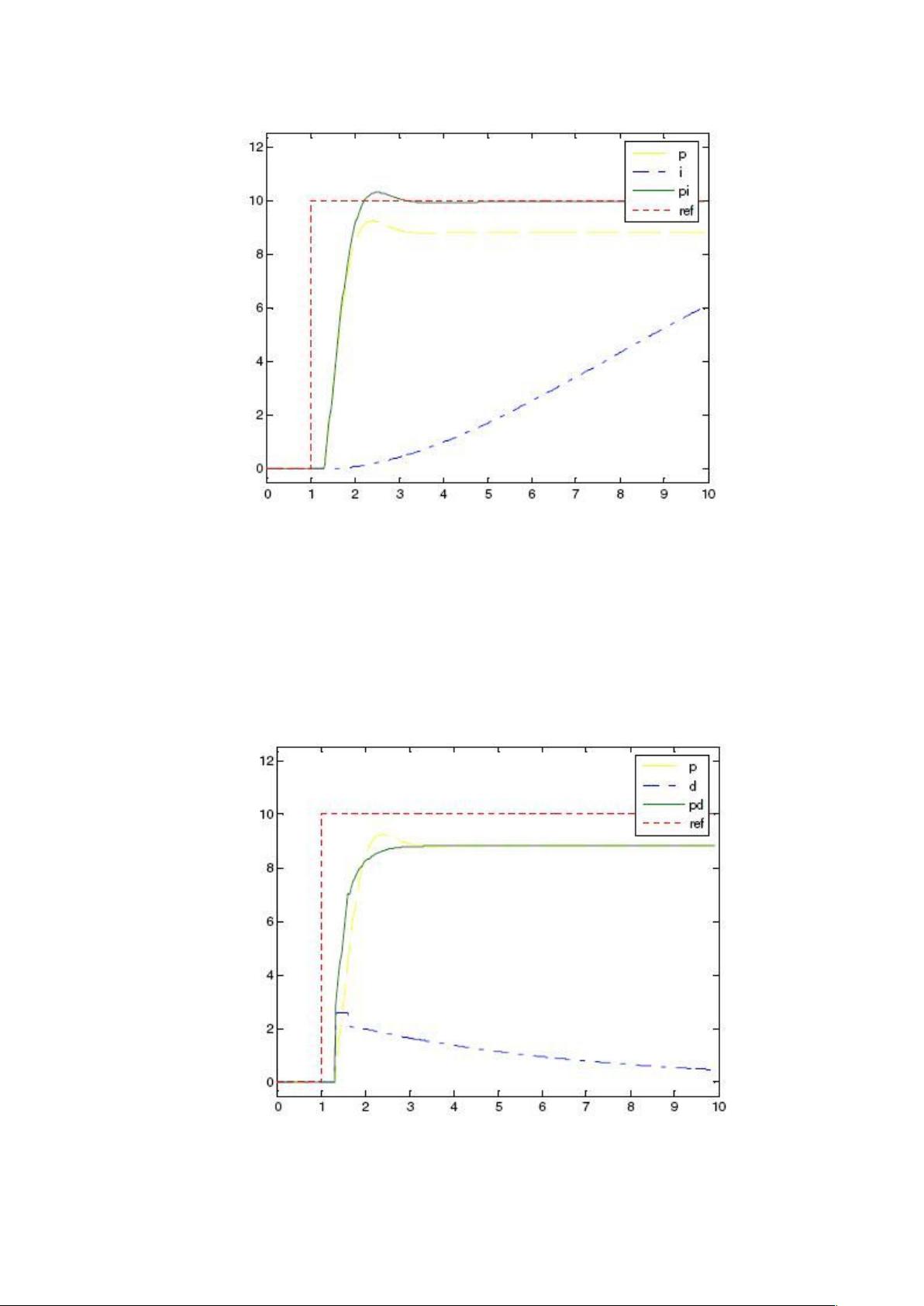
图 3 积分(I)控制和比例积分(PI)控制阶跃相应
微分(D)控制
在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)
成正比关系。
由于自动控制系统有较大的惯性组件(环节)或有滞后(delay)组件,在
调节过程中可能出现过冲甚至振荡。解决办法是引入微分(D)控制,即在误差很
大的时候,抑制误差的作用也很大;在误差接近零时,抑制误差的作用也应该
是零。
图 4 微分 (D)控制和比例微分(PD)控制阶跃相应
剩余15页未读,继续阅读
2021-10-19 上传
2023-05-31 上传
2014-09-24 上传
2012-06-30 上传
2022-11-15 上传
2022-06-15 上传
107 浏览量

panzf0102
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







