使用MATLAB Simulink创建和转换FUZZY模块的步骤
需积分: 24 52 浏览量
更新于2024-09-10
1
收藏 1.09MB DOCX 举报
"Simulink中的FUZZY模块可以用于创建和使用模糊逻辑控制器,将设计好的模糊控制器转换成表格形式,便于生成嵌入式代码应用于实际控制系统。本过程主要涉及MATLAB模糊控制工具箱的使用,Simulink模型的构建,以及系统测试界面的设置。"
在MATLAB中,模糊逻辑控制是一种处理不确定性和非线性问题的有效方法。通过模糊逻辑工具箱,我们可以设计出适应各种情况的模糊控制器。以下是对设计和实现模糊控制器的关键步骤的详细解释:
1. **设计模糊控制器**:
- 首先,启动模糊控制工具箱(通过在命令窗口输入`fuzzy`)。
- 确定输入和输出变量。在这个例子中,输入是误差(e)和误差变化率(ec),输出是控制量(u)。
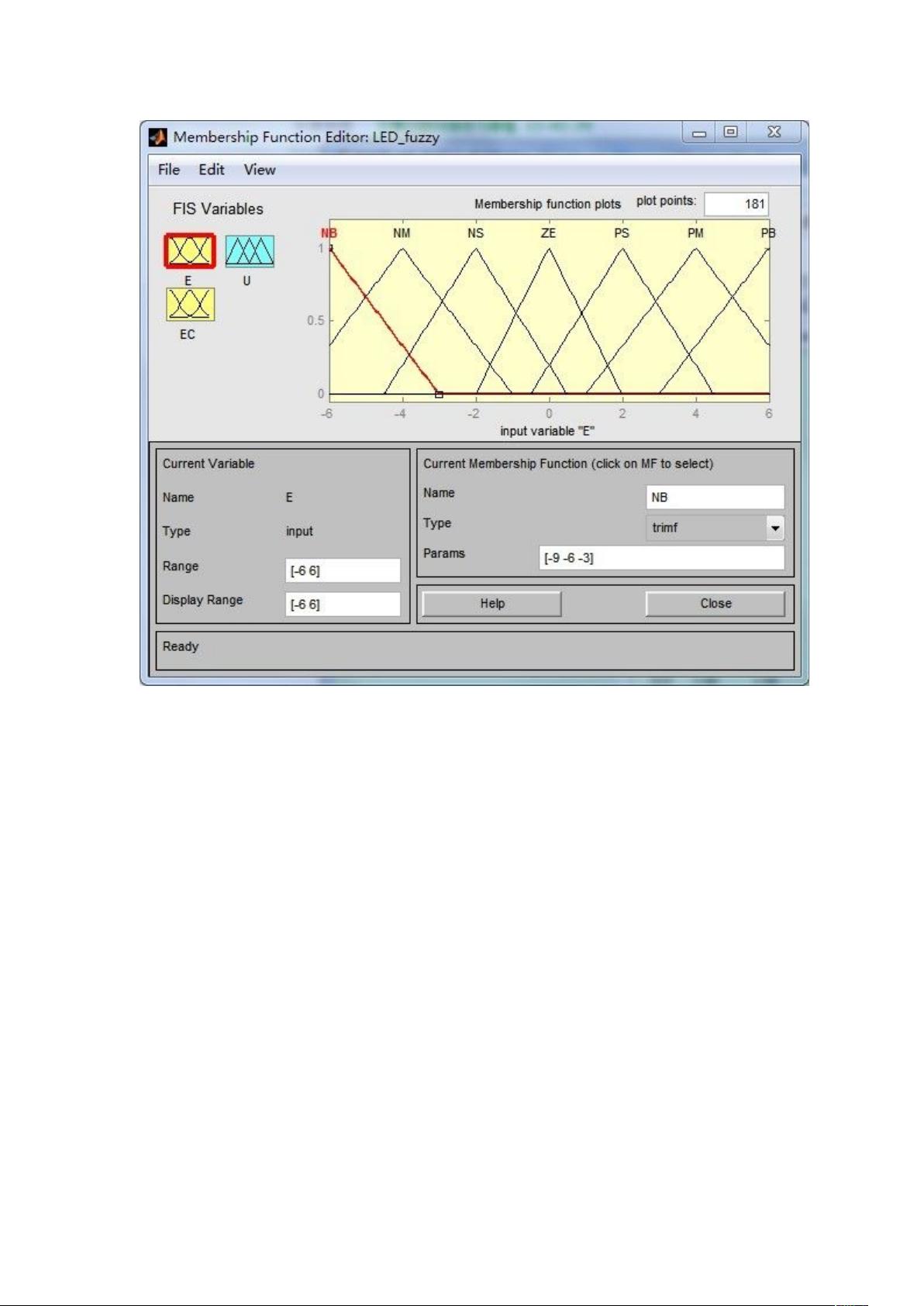
- 定义语言值(如NB, NM, NS, ZE, PS, PM, PB)和它们的隶属函数。设置输入输出变量的论域,如E和EC的论域为[-66],U的论域为[-10, 10]。
- 选择或自定义输入和输出变量的隶属度函数。可以使用不同的形状,如三角形、梯形等。
- 规则制定是模糊控制的核心,通常基于领域知识和经验。例如,可以定义49条规则来覆盖所有可能的输入组合。
- 解模糊化是将模糊输出转换为具体数值的过程,常用方法包括重心法、最大隶属度法等。在这里,我们选择了重心法。
2. **建立Simulink模型**:
- 打开Simulink(在命令窗口输入`simulink`)。
- 创建新的模糊控制器模型,导入之前设计的模糊控制器(使用`fuzzy=readfis('fuzzy_control')`加载到工作空间,并设置FuzzyLogicController参数)。
- 保存模型为`fuzzy_model`,以便后续使用。
3. **系统测试界面设置**:
- 使用Simulink的SystemTest功能进行系统测试和验证。
- 在系统测试界面添加模型(将`fuzzy_model`添加到MainTest)。
- 配置变量定义,如输入和输出的期望值和限制条件,以进行仿真测试。
这个过程完成后,你可以通过Simulink的Simulation Output或者Data Inspector查看模糊控制器的输出,并可以进一步生成适用于嵌入式系统的代码。对于实际应用,这一步骤至关重要,因为生成的代码可以直接部署在硬件上,实现模糊控制策略。
在实际工程中,模糊逻辑控制器常被用于自动驾驶、机器人控制、电力系统调节等领域,其灵活性和自适应能力使得它在处理复杂控制问题时表现出色。通过Simulink和模糊控制工具箱,设计师能够以图形化的方式直观地设计、测试和优化模糊逻辑系统,大大简化了开发流程。
4、模糊控制规则的制定。
对于我们这个二维控制结构以及相应的输入模糊集,我们可以制定 49 条模糊控制规则。
剩余13页未读,继续阅读
557 浏览量
1810 浏览量
375 浏览量
点击了解资源详情
点击了解资源详情
106 浏览量
点击了解资源详情

老版
- 粉丝: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java工程师面试精华:核心知识点与常见问题
- OGRE、Irrlicht等3D引擎深度解析与特性比较
- CMOS射频低噪声放大器设计与性能优化
- Protege入门:创建简单动物本体及基础用法教程
- JavaScript 弹窗代码合集与实现技巧
- Linux 0.11内核深度注解:入门与理解指南
- 日语在软件开发中的应用
- C语言参考手册:标准库函数详解
- 限制DDL操作:使用触发器监控与阻止truncates
- JavaScript教程:动态编程语言,Ajax基石与Java区别详解
- Oracle数据库安装与管理详解
- jQuery:简化JavaScript和Ajax开发的框架
- VMware上安装Red Hat Linux 4与Oracle10g详细步骤
- InfoQ中文站免费图书:深入浅出Struts2
- 提升C#面试必备:.NET访问权限、SQL查询、页面间数据传递与异常处理详解
- .NET面试深度解析:130道经典试题
