OpenCV中的Canny边缘检测与图像金字塔应用解析
49 浏览量
更新于2024-08-28
收藏 1.55MB PDF 举报
"本文详细介绍了OpenCV中的Canny边缘检测算法、图像金字塔以及轮廓检测的概念和应用。使用Python 3.6.10和OpenCV 4.1.2版本进行演示,通过IDE PyCharm进行代码编辑。文章通过具体实例展示了Canny算法的工作流程,并对比了不同阈值设置对边缘检测的影响。同时,还探讨了高斯金字塔和拉普拉斯金字塔在图像处理中的作用,以及如何进行图像的上下采样和轮廓检测。"
在计算机视觉领域,边缘检测是一种重要的预处理技术,Canny检测算法是其中的经典方法。Canny算法主要包含以下几个步骤:
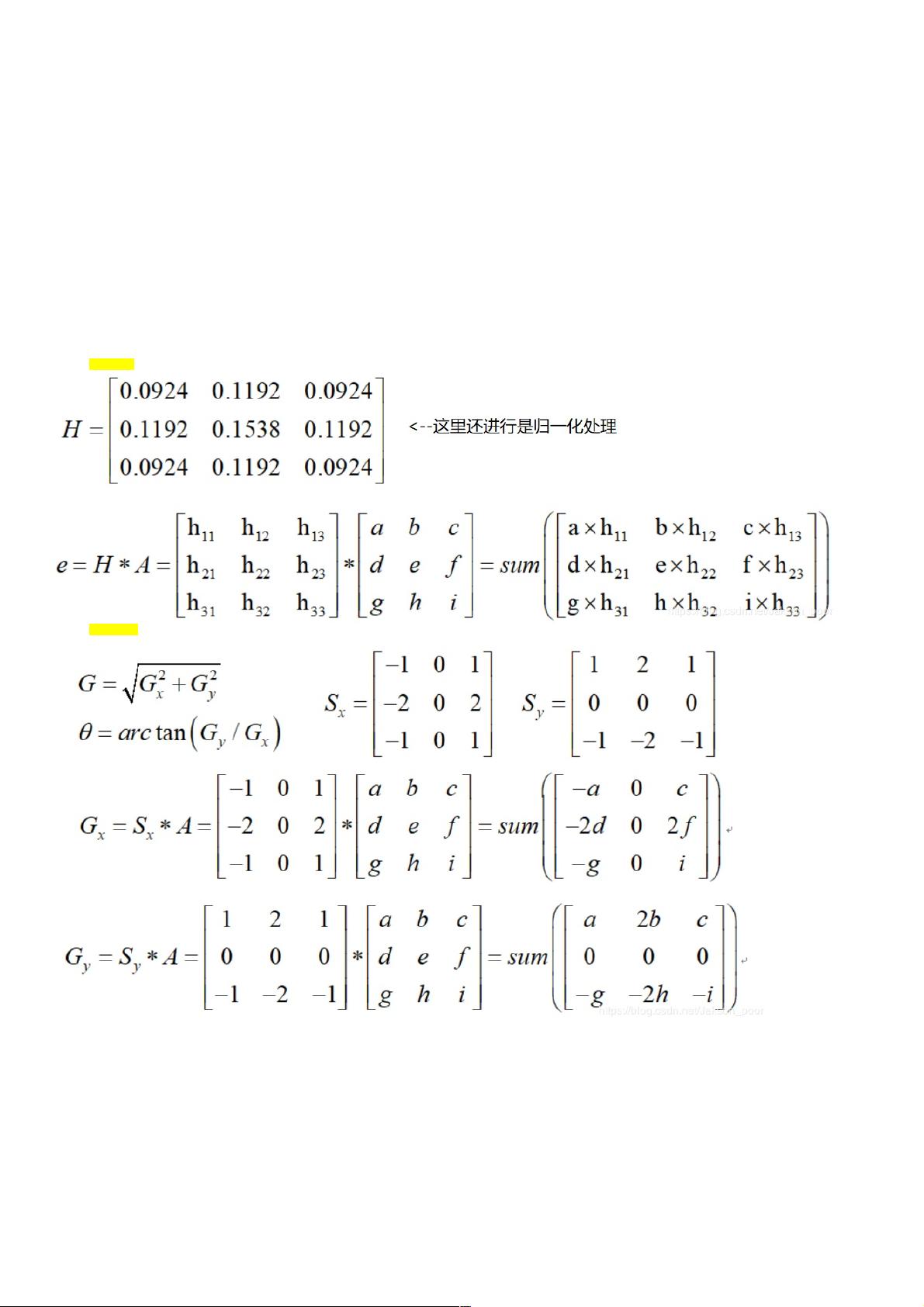
1. **高斯滤波**:首先,使用高斯滤波器对输入图像进行平滑处理,以减少噪声的影响。高斯滤波是一种线性平滑滤波,可以有效地去除图像中的高频噪声。
2. **梯度计算**:接着,使用Sobel算子计算图像中每个像素点的梯度强度和方向。Sobel算子是用于计算图像梯度的差分算子,它能够提供边缘的方向信息。
3. **非极大值抑制**:此步骤用于消除边缘检测可能导致的虚假响应,确保边缘检测的准确性,只保留最显著的边缘像素。
4. **双阈值检测**:设置两个阈值,较低阈值用于检测潜在边缘,较高阈值用于确认真实边缘。这样可以区分强边缘和弱边缘,避免误检和漏检。
5. **边缘连接与抑制**:最后,通过抑制孤立的弱边缘,连接相邻的强边缘,完成边缘检测。这样得到的边缘更加连贯,更符合人眼的观察习惯。
在实际应用中,如示例所示,可以通过调整Canny算法的阈值参数来控制边缘检测的精细程度。阈值设置越小,边缘可能更细腻,但可能会增加噪声;反之,阈值设置越大,边缘会更明显,但可能会丢失一些细小的边缘信息。
图像金字塔是一种处理图像大小变化的技术,分为高斯金字塔和拉普拉斯金字塔。**高斯金字塔**通过不断下采样构建,用于减少图像的分辨率,而**拉普拉斯金字塔**是在高斯金字塔基础上进一步计算得到的,它保留了更多的细节信息,适合于图像融合和缩放操作。在代码中,`cv2.pyrDown()`用于图像的下采样,`cv2.pyrUp()`则用于上采样。需要注意的是,上下采样的顺序不同会导致图像信息的损失。
此外,文章中虽然没有具体提及轮廓检测,但在图像处理中,轮廓检测通常是在边缘检测之后,用于识别和分离图像中的特定区域。OpenCV中的`cv2.findContours()`函数可以用来提取图像的轮廓,这些轮廓信息对于后续的形状分析、目标识别等任务至关重要。
本文提供了关于OpenCV中Canny边缘检测算法、图像金字塔以及轮廓检测的详细知识,有助于读者深入理解这些基础概念并在实际项目中应用。
Opencv-Canny检测算法、图像金字塔与轮廓检测详解检测算法、图像金字塔与轮廓检测详解
环境环境
python : 3.6.10
Opencv : 4.1.2
IDE : pycharm
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 定义函数
def cv_show(name, img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
Canny检测算法检测算法
Canny
检测算法是
Opencv
的内置算法,实现过程较简单,可以直接调用。
其实现思想为:
1)使用高斯滤波,平滑图像,滤除噪声
2)使用sobel算子计算图像中每个像素点的梯度强度和方向
3)应用非极大值抑制,以消除边缘检测带来的杂散效应
4)应用双阈值检测确定真实的和潜在的边缘
下载后可阅读完整内容,剩余6页未读,立即下载
2019-10-17 上传
2017-06-06 上传
2013-05-03 上传
2023-11-24 上传
2023-04-30 上传
2023-05-26 上传
2024-06-07 上传
2023-12-13 上传
2023-09-02 上传

weixin_38656662
- 粉丝: 2
- 资源: 898
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
