S7-1500与V90:闭环运动控制详解及接线示例
需积分: 50 132 浏览量
更新于2024-07-19
3
收藏 836KB PDF 举报
本文详细阐述了如何利用西门子S7-1500高级可编程控制器与SINAMICSV90伺服系统进行闭环位置控制。S7-1500作为PLC,具备强大的运动控制功能,支持各种类型的轴如旋转轴、定位轴和同步轴,并配备了轴控制面板和丰富的在线诊断工具,便于驱动装置的调试与优化。本文主要关注以下几个关键步骤:
1. **S7-1500组态**:
- 硬件配置:确保正确选择和配置合适的模块,包括可能用到的模拟量输出模块AQ,用于与带模拟设定值接口的驱动装置通信。
- 工艺对象设置:创建和配置工艺对象,如轴、速度给定、位置反馈等,这些都是闭环控制的基础。
2. **V90配置**:
- 输入输出信号:明确V90的输入信号(如使能信号)和输出信号(如速度命令),以便与S7-1500进行有效的数据交换。
- 参数设置:调整V90的相关参数,如速度控制算法、滤波器设置等,以满足特定的控制需求。
3. **接线与通信**:
- 使能信号:连接S7-1500的控制信号到V90的使能端口,启动伺服系统的动作。
- 速度给定:将PLC的速度指令通过PROFIBUS DP或PROFINET I/O传输到V90,实现精确的速度控制。
- 位置反馈:配置位置反馈通道,确保位置信息的实时传递和闭环控制的准确性。
4. **分布式I/O ET200SP连接**:
- 等时同步:确保ET200SP模块与S7-1500和V90之间的数据同步,保证通信的可靠性。
- OB91循环时间设置:合理设置程序块OB91的执行周期,以匹配系统的响应速度。
5. **设备调试**:
- 在实际操作前,进行细致的设备调试,检查接线是否正确,参数设置是否合理,以确保闭环控制的稳定性和精度。
在整个过程中,版权信息强调了所有内容受西门子公司保护,未经许可不得复制或传播。通过本文,读者可以了解S7-1500与V90集成在工业自动化领域的应用方法,这对于自动化工程师和系统集成者来说是一份实用的技术指南。
4
Copyright Siemens
AG Copyright year
All rights reserved
2 简介
2.1 S7-1500 运动控制功能
S7-1500 运动控制功能支持旋转轴、定位轴、同步轴和外部编码器等工艺对象。
并拥有轴控制面板以及全面的在线和诊断功能有助于轻松完成驱动装置的调试和
优化工作。
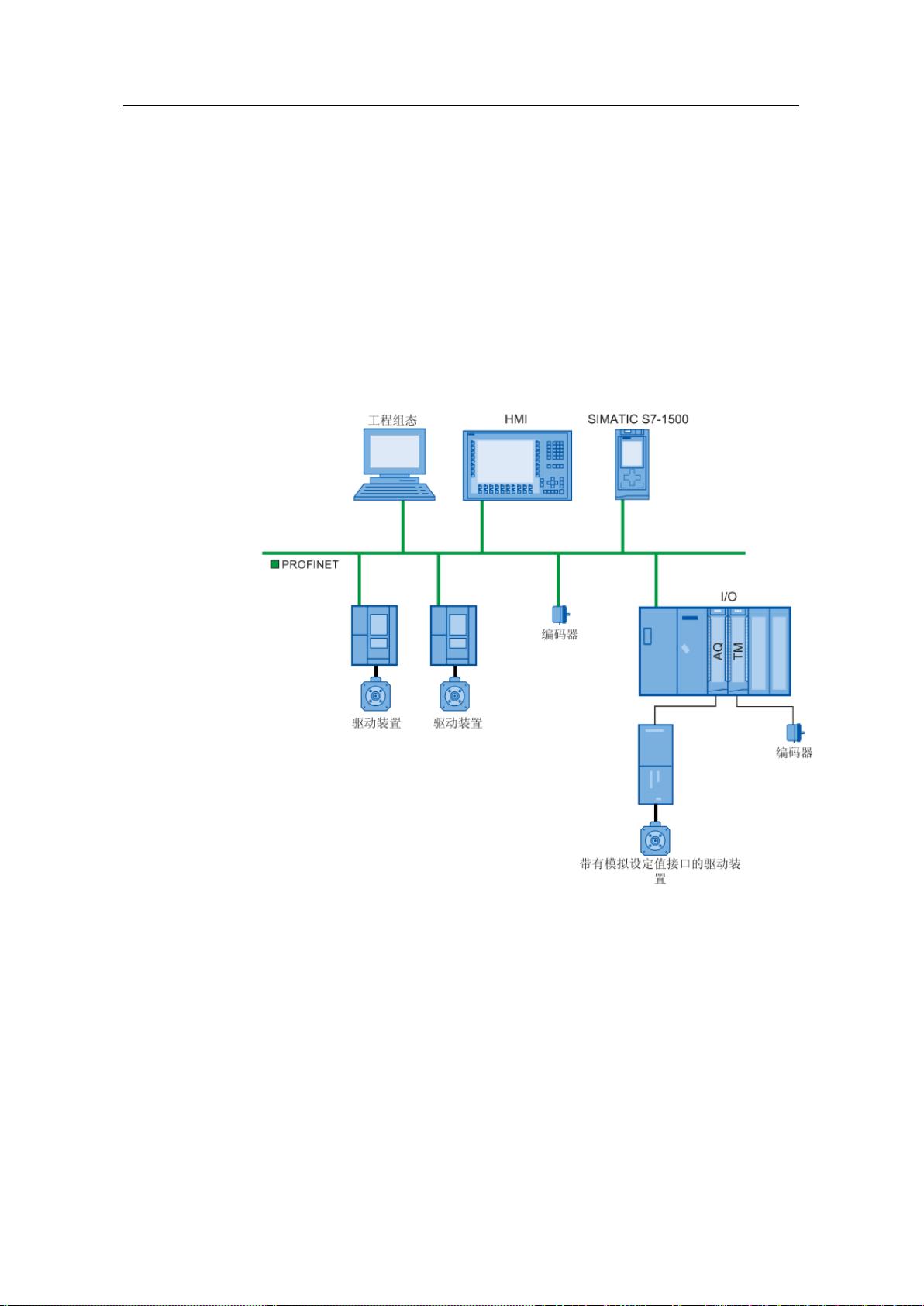
S7-1500 支持多种连接方式。可以使用 PROFIBUS DP 和 PROFINET IO 连接
驱动装置和编码器,也可以使用模拟量输出模块(AQ)连接带模拟设定值接口
的驱动装置并通过工艺模块(TM),读出编码器的信息。本文中所涉及的例子就
是使用第二种方式。
图 2-1 连接方式示意
2.2 SINAMICS V90
SINAMICS V90 是西门子推出的一款小型、高效便捷的伺服系统,可以实现位
置控制、速度控制和扭矩控制。
使用 V90 的速度控制功能可以与 S7-1500 运动控制功能配合使用,接收 S7-
1500 模拟量模块发出的+-10V 模拟量信号做为速度给定,并通过 PTO 功能反馈
位置信号给 S7-1500,在 S7-1500PLC 中实现闭环位置控制。
剩余15页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2014-10-09 上传
2021-07-30 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2016-10-25 上传

DeanCHow
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- R语言中workflows包的建模工作流程解析
- Vue统计工具项目配置与开发指南
- 基于Spearman相关性的协同过滤推荐引擎分析
- Git基础教程:掌握版本控制精髓
- RISCBoy: 探索开源便携游戏机的设计与实现
- iOS截图功能案例:TKImageView源码分析
- knowhow-shell: 基于脚本自动化作业的完整tty解释器
- 2011版Flash幻灯片管理系统:多格式图片支持
- Khuli-Hawa计划:城市空气质量与噪音水平记录
- D3-charts:轻松定制笛卡尔图表与动态更新功能
- 红酒品质数据集深度分析与应用
- BlueUtils: 经典蓝牙操作全流程封装库的介绍
- Typeout:简化文本到HTML的转换工具介绍与使用
- LeetCode动态规划面试题494解法精讲
- Android开发中RxJava与Retrofit的网络请求封装实践
- React-Webpack沙箱环境搭建与配置指南
