S7-200系列PLC控制下的机械手系统设计与应用
版权申诉
127 浏览量
更新于2024-07-01
1
收藏 2.58MB DOCX 举报
机械手控制系统设计是现代工业自动化中的一个重要组成部分,其主要目标是提高生产效率,降低劳动强度,保障工人的安全。本文档详细介绍了针对特定控制需求设计的一种搬运机械手控制系统,采用德国西门子公司生产的S7-200系列CPU226可编程控制器(PLC)作为核心控制元件。S7-200系列PLC以其强大的功能、易编程性、低故障率和高性价比,为机械手的自动化操作提供了可靠的基础。
设计流程包括以下几个关键步骤:
1. **控制方案确定**:首先,根据实际生产环境和任务需求,确定了机械手的搬运功能,如下降、伸出、夹紧工件、上升、旋转等动作,以及手动/自动切换、循环次数设定和状态指示等功能。
2. **电气原理图设计**:设计了机械手控制系统的基本电气原理图,明确了信号传输路径和各个部件间的接口,确保系统的连通性和可靠性。
3. **硬件与软件选型**:选择S7-200 CPU226作为PLC型号,利用其丰富的输入/输出点和高级编程功能,实现了对机械手的动作控制和数据处理。
4. **PLC程序设计**:采用梯形图(Ladder Logic)编程语言,编写了详细的用户程序,包括逻辑控制、定时器/计数器、中断处理等内容,以驱动机械手按照预定的顺序执行操作。
5. **模拟调试与验证**:通过模拟调试,确保控制系统能够准确无误地控制机械手在生产流水线上的动作,提高了搬运工作的精度和安全性,同时实现了生产线的柔性和高效运行。
通过这次毕业设计项目,学生不仅深化了对PLC控制系统的理解和应用,还锻炼了他们的系统分析、问题解决、设计绘图、查阅技术文档、软件运用以及实际操作等关键技能。这不仅有助于他们在相关工作岗位上快速适应,还能增强他们在复杂工程环境中解决问题的能力,为未来职业生涯打下坚实的基础。
关键词:机械手、PLC、CPU、梯形图编程 - 这些词汇突出了论文的核心技术和实现方法,展示了设计者对当前工业自动化技术的掌握程度。

2 机械手控制系统工艺流程与总体方案设计
电气控制系统是根据指令准确实现生产流程的重要核心,能够保证搬运机械手
准确快速的完成工作。本次课题的目的就是根据工艺流程来硬件设计和软件编程,
以满足搬运生产的需要,对搬运机械手尤为重要。
2.1 机械手控制系统的流程设计
搬运机械手作为一种自动化设施,电气系统应完成预设的动作,实现货物的准
确搬运。本课题中的搬运机械手控制系统应具有如下功能:
控制系统能够根据 PLC 输入的指令,准确灵活的控制搬运机械手,完成搬运任
务;控制系统具有状态显示功能,当设备运行时,各部件的运行状态用绿色指示灯
表示;当设备完成指定动作处于停止状态时,各部件的运行状态用红色指示灯表示,
按下停止按钮和启动按钮后完成指示灯状态进行切换;控制系统能够保证搬运机械
手针对不同生产任务的要求,能够准确完成货物的搬运,保证快速性和准确性兼顾;
按下急停按钮,能够立即停止工作,保证了生产的安全性。搬运机械手通过程序的
改变,能自由的改变控制方法,实现柔性的生产控制。
2.2 机械手的工艺过程
机械手的工艺过程
机械手的结构和各部分动作示意图,如图 2.1 所示。机械手的工作均由电机驱
动,它的上升、下降、左移、右移都是有电机驱动螺纹丝杆旋转来完成的。
分析工艺过程
机械手的初始位置停在原点,按下启动后按扭后,机械手将下降—伸出—加紧
工件—上升—右旋—再下降—放松工件—缩回—放松—左旋十个动作,完成一个工
作周期。运动过程如图 2.2 所示。机械手的下降、上升、右旋、左旋、伸出、缩回
等动作转换,是由相应的限位开关来控制的,而加紧、放松动作的转换是有时间来
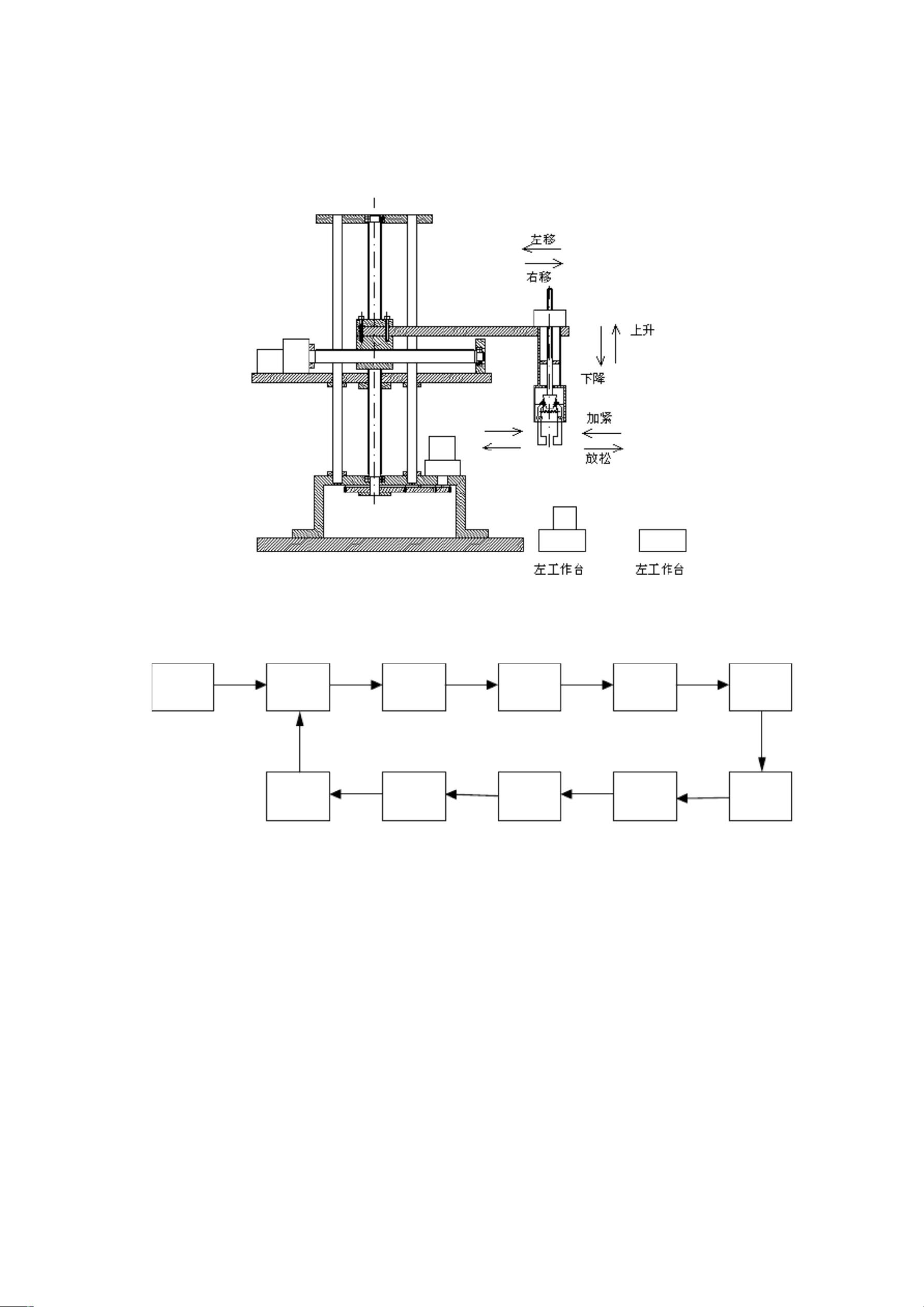
剩余56页未读,继续阅读
2022-07-11 上传
2022-07-12 上传
2021-10-10 上传
点击了解资源详情
2022-07-12 上传

不吃鸳鸯锅
- 粉丝: 8538
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
