点云分类新框架:PointAugment,自适应增强与鲁棒性提升
需积分: 10 168 浏览量
更新于2024-09-03
收藏 1.86MB PDF 举报
PointAugment是一个专为点云分类设计的自动增强框架,它在计算机视觉领域的重要会议CVPR上发布。这个创新的方法旨在提高点云样本数据的多样性,从而提升分类网络的性能和泛化能力。传统的2D图像增强技术主要依赖预设规则或固定策略,而PointAugment则引入了样本感知和对抗学习的概念。
PointAugment的核心在于其样本感知能力。它并非简单地应用固定的增强操作,而是通过一个自适应的增强器网络,该网络与分类网络协同工作,学习生成最适合当前分类任务的增强样本。这种策略使得每个样本的增强过程都是个性化和动态的,能够更好地适应各种不同的点云形状和特征。
设计上,PointAugment采用了一种形状级别的变换和点级别的位移,构建了一个可学习的点增强函数。形状级别的变换考虑了整体的结构信息,如物体的形状和拓扑结构,而点级别的位移则关注局部细节的变化,如点的位置和方向。这样的设计有助于保持点云的原始特性同时引入必要的变异,使模型能更好地理解点云数据的复杂性。
为了确保增强后的样本对分类器的学习有益,PointAugment精心设计了损失函数。这个函数不仅考虑了分类任务的准确度,还会随着分类器学习进度的变化进行调整,以引导增强网络生成的样本能够更好地促进模型的训练和性能提升。这意味着PointAugment能够动态地优化增强策略,确保在训练过程中始终向着最有效的方向迭代。
实验证明,PointAugment显著提高了形状分类和检索任务的性能,展示了其在面对数据多样性和模型鲁棒性挑战时的有效性。这对于点云处理领域的研究者和工程师来说,是一个重要的工具,能够简化点云分类任务的样本增强过程,提高模型的泛化能力和应对各种复杂场景的能力。PointAugment是点云处理领域中一个值得深入研究和应用的创新技术。
PointAugment: an Auto-Augmentation Framework
for Point Cloud Classification
Ruihui Li
1
Xianzhi Li
1,2
Pheng-Ann Heng
1,2
Chi-Wing Fu
1,2
1
The Chinese University of Hong Kong
2
Guangdong Provincial Key Laboratory of Computer Vision and Virtual Reality Technology,
Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, China
{lirh,xzli,pheng,cwfu}@cse.cuhk.edu.hk
Abstract
We present PointAugment
1
, a new auto-augmentation
framework that automatically optimizes and augments point
cloud samples to enrich the data diversity when we train
a classification network. Different from existing auto-
augmentation methods for 2D images, PointAugment is
sample-aware and takes an adversarial learning strategy to
jointly optimize an augmentor network and a classifier net-
work, such that the augmentor can learn to produce aug-
mented samples that best fit the classifier. Moreover, we
formulate a learnable point augmentation function with a
shape-wise transformation and a point-wise displacement,
and carefully design loss functions to adopt the augmented
samples based on the learning progress of the classifier. Ex-
tensive experiments also confirm PointAugment’s effective-
ness and robustness to improve the performance of various
networks on shape classification and retrival.
1. Introduction
In recent years, there has been a growing interest in de-
veloping deep neural networks [20, 21, 33, 16, 15] for 3D
point clouds. To robustly train a network often relies on the
availability and diversity of the data. However, unlike 2D
image benchmarks such as ImageNet [8] and MS COCO
dataset [12], which have over millions of training samples,
3D datasets are typically much smaller in quantity, with rel-
atively small amount of labels and limited diversity. For
instance, ModelNet40 [34], one of the most commonly-
used benchmark for 3D point cloud classification, only has
12,311 models of 40 categories. The limited data quantity
and diversity may cause overfitting problem and further af-
fect the generalization ability of the network.
Nowadays, data augmentation (DA) is a very common
strategy to avoid overfitting and improve the network gener-
1
https://github.com/liruihui/PointAugment
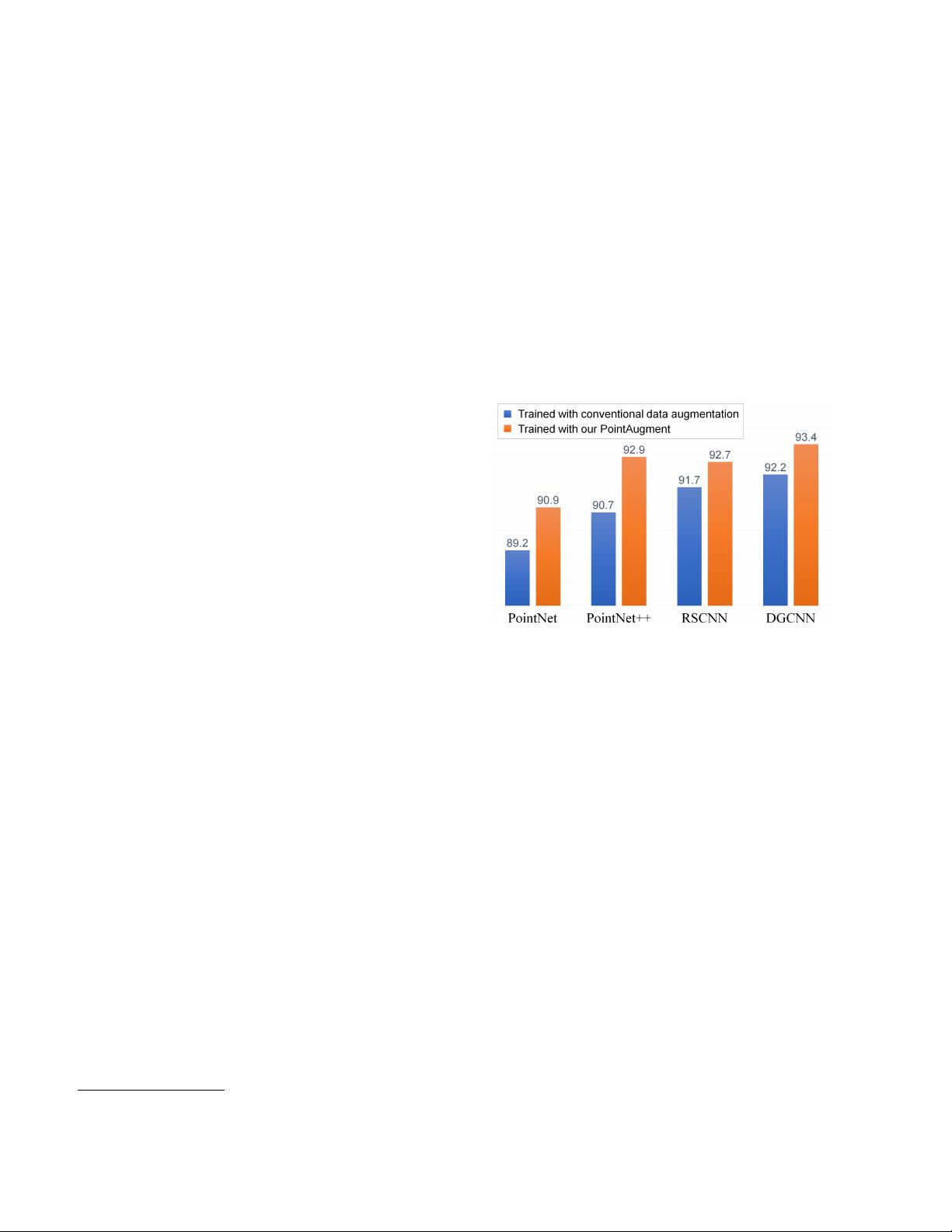
Figure 1: Classification accuracy (%) on ModelNet40 with
or without training the networks with our PointAugment.
We can see clear improvements on four representative net-
works. More comparison results are presented in Section 5.
alization ability by artificially enlarging the quantity and di-
versity of the training samples. For 3D point clouds, due to
the limited amount of training samples and an immense aug-
mentation space in 3D, conventional DA strategies [20, 21]
often simply perturb the input point cloud randomly in a
small and fixed pre-defined augmentation range to main-
tain the class label. Despite its effectiveness for the existing
classification networks, this conventional DA approach may
lead to insufficient training, as summarized below.
First, existing methods regard the network training and
DA as two independent phases without jointly optimizing
them, e.g., feedback the training results to enhance the DA.
Hence, the trained network could be suboptimal. Second,
existing methods apply the same fixed augmentation pro-
cess with rotation, scaling, and/or jittering, to all input point
cloud samples. The shape complexity of the samples is ig-
nored in the augmentation, e.g., a sphere remains the same
no matter how we rotate it, but a complex shape may need
larger rotations. Hence, conventional DA may be redundant
or insufficient for augmenting the training samples [5].
1
arXiv:2002.10876v1 [cs.CV] 25 Feb 2020
下载后可阅读完整内容,剩余9页未读,立即下载
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传

ZrZrZr.l
- 粉丝: 640
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
