正交编码器测速原理与TI 28335芯片T/M法源码详解
正交编码器是一种常见的机械式位置传感器,广泛应用于工业自动化和伺服系统中,用于精确测量旋转物体的速度和角度。本文将详细介绍两种常用的测速方法:M法(定时测角法)和T法(周期测速法),并结合TI公司的28335芯片中的EQEP模块进行实例讲解。
1. M法测速 (定时测角法)
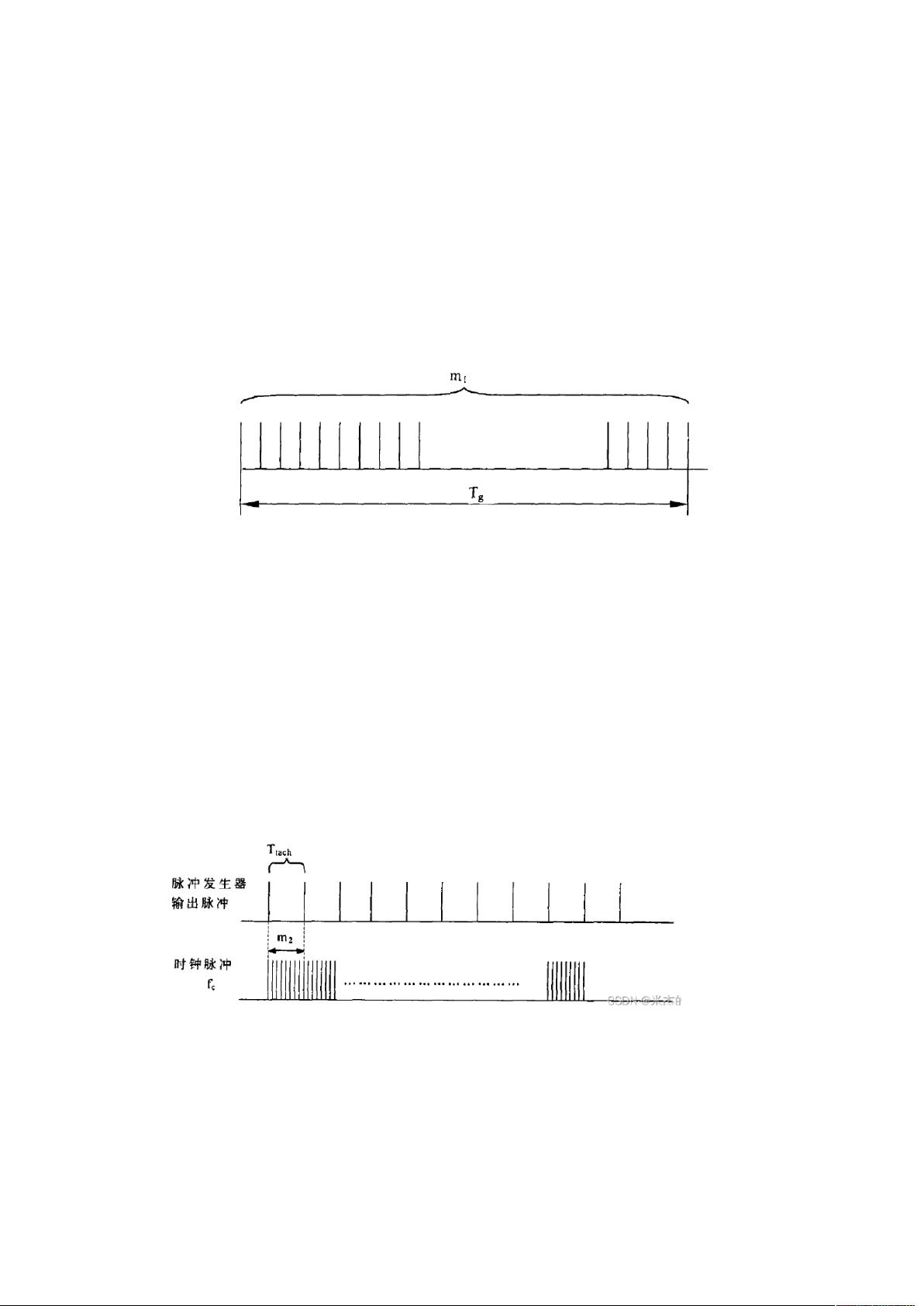
M法通过设定一个固定的时间窗口(例如T = 1秒),在这段时间内统计光电编码器产生的脉冲个数(M1)。由于首尾半个脉冲可能会造成低速测量时的误差,所以M法更适合于高转速测速。假设电机每转一周产生p个脉冲,测速公式为:
\[ n = \frac{60 \times M1}{p \times T} \]
若电机4秒转一周,但在1秒内只捕捉到一个脉冲,M法会给出错误的结果,因为无法捕捉到完整的周期,导致速度值偏低或为零。
2. T法测速 (周期测速法)
T法则是通过测量两个相邻脉冲之间的实际时间间隔来确定周期,从而推算转速。这种方法在高转速下可能因为周期计算误差较大而不适用,但在低转速测量中更为精确。例如,使用定时器产生10kHz的高频时钟脉冲,当编码器产生第二个多余脉冲时,计数周期结束,此时计数器读数M2代表了两个脉冲之间的实际时间(T = 1/10000秒 = 0.1ms)。根据电机一周产生p个脉冲,计算公式为:
\[ n = \frac{60}{\frac{M2 \times T}{p}} \]
这种方法避免了因时间窗口设置不当导致的低速测量误差,因为它能精确捕捉到每个周期。
在实际应用中,如使用TI的28335芯片的EQEP模块进行测速,开发者需要根据芯片提供的接口编写相应的程序,配置定时器,捕获脉冲,并进行数据处理和计算。源代码通常会包括初始化定时器、设置中断处理函数、捕获脉冲事件、存储计数数据以及计算转速等步骤。这部分代码会根据芯片文档进行定制,以确保测速精度和稳定性。
总结来说,正交编码器的测速方法选择取决于实际应用中的精度需求和工作环境,M法适合高速,T法则适合低速或需要更精确测量的情况。通过理解这两种方法的工作原理和源码编写,开发者可以更好地优化编码器的测速性能。
光电编码器的测速方法
1、M 法测速
M 法通过计算确定时间内的脉冲个数得到转速,测量过程中首尾半个脉冲误差对低转
速测量影响较大,因此多用于高转速测速;
又称“定时测角法”,在人为设定的单位时间 T 内对光电编码器产生的脉冲个数 M1 进行
计数,然后换算出转速。如果电机转一周产生 p 个脉冲信号。在规定时间 T 内测得脉冲总数
为 M1,则电机每分钟转速 n=60*M1/(pT),p 为被测设备转一周产生的脉冲数。
比如我设置一个定时器 T2,每一秒钟产生一次中断 T。那么在这一秒钟,通过定时器 T3
的通道 3 捕获计数器通过捕获上升沿的脉冲数量来计算一分钟的转速。
公式的意思是电机旋转一周产生了 p 个脉冲数,而我设定的 T 为 1 秒的定时器,一共捕
获到了 m 个脉冲数。电机一共转了 m/p 圈。再除一个 T 就是一秒钟转了多少圈。这个 T 也
可以设置为 2 秒,3 秒等等,那就是说我两秒转了多少圈,我除以 2 就是一秒转了多少圈而
已。再乘以 60 就是一分钟转了多少圈,即 n=r/min。
M 测速法为什么低速误差大?主要是它要在规定时间内捕获的脉冲数有关,速度低捕
获的脉冲数少,速度计算就会很粗糙。比如我电机 4 秒钟转一周,我设置 1 秒钟计算捕获计
数器的脉冲数,而电机旋转一周只有一个脉冲,那么得出的速度值就是 0。因为在这一秒钟
没有捕获到一个脉冲数。这样解释大家对 M 测速法就有了直观的理解了
2、T 法测速
T 法通过计算两相邻脉冲的时间差换算得到周期及转速,在高转速测量过程中周期较小
误差较大,故多用于低转速测速;
可以想象到,电机速度越快,光电编码器产生的脉冲时间间隔就越短,我们取某一相邻
两个光电编码器产生的脉冲实时 T 法测速。具体实现如下:定时器产生高速时钟脉冲,什么
速度算高速呢?本实验我采用 10kHz 这样一个频率,这个由定时器产生的时钟脉冲时间间隔
是确定的。当光电编码器产生第一个脉冲时,高频脉冲计数器开始计算高频脉冲定时器产生
的时钟脉冲数量,当光电编码器产生第二个脉冲时,即第一个计数周期到达后,计数器停止
计数,且计数值记为 M2。实际使用中通过一个高频时钟脉冲的个数 M2 来计算编码器两个
脉冲之间的时间间隔。我们可以这么理解,如果电机旋转一周产生了 p 个脉冲数,那么这个
下载后可阅读完整内容,剩余6页未读,立即下载
2015-12-10 上传
138 浏览量
109 浏览量
2024-04-03 上传
2021-01-17 上传
2012-03-16 上传

yhb8686725
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
