FANUC机器人MODBUS TCP配置步骤与PLC通信教程
版权申诉
"该文档详细介绍了如何配置FANUC机器人进行MODBUS TCP通信,通过示教器进行实物演示。步骤包括设置机器人的IP地址、解锁HTTP选项,配置ModbusTCP及I/O分配,并展示了西门子PLC侧的TCON_IP_V4参数设置和MB_Client功能块的使用。最后,通过IO点位对照表验证了通信的正确性。"
FANUC机器人MODBUS TCP通信配置涉及到以下几个关键知识点:
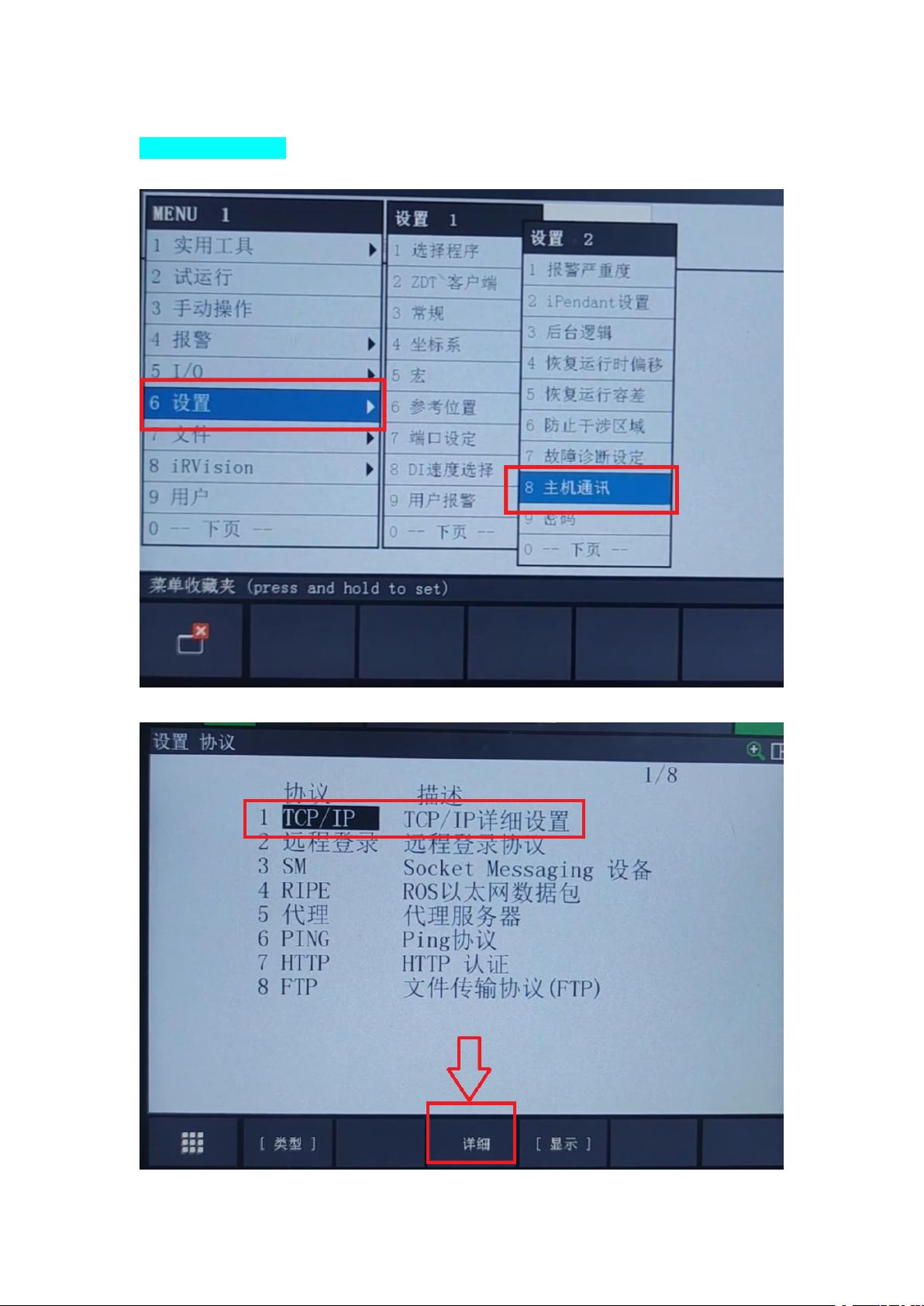
1. **TCP/IP设置**:在FANUC机器人的示教器中,通过“设置”菜单进入“主机通讯”,选择TCP/IP协议,并配置机器人的IP地址。例如,将IP地址设为192.168.1.10,子网掩码设为255.255.255.0。这使得机器人能接入TCP网络并与其它设备通信。
2. **HTTP解锁**:为了启用MODBUS通信,需要解锁HTTP选项。在主设置页面选择第7项HTTP,进入详细配置界面,解锁前4个项目,显示为“U”。
3. **ModbusTCP配置**:在“MENU—I/O”菜单下找到ModbusTCP设置。默认参数通常可以保留,但输入/输出字数(以Word为单位)需根据实际需求调整。例如,设置为4意味着有64个BOOL位可供使用。
4. **I/O分配**:在数字输出(DO)和数字输入(DI)界面,分配MODBUSTCP的机架号、插槽和开始点。通常,机架号设为96,插槽设为1。分配完成后,可能需要重启控制柜以使设置生效。
5. **西门子PLC设置**:在PLC侧,需要配置TCON_IP_V4参数以指定通信参数。接着,使用MB_Client功能块进行MODBUS通信,该功能块需要在OB1中调用,并填入相应的参数,如IP地址、站号、寄存器地址等。
6. **字节顺序处理**:由于FANUC和西门子PLC在存储数据时的字节顺序不同(大端和小端),在通信时需要对数据的高低字节进行交换,以确保数据正确传输和解释。
7. **通信验证**:通过观察双方的输入输出信号,可以确认通信是否正常。例如,当PLC的M600.0和M600.1设为TRUE时,观察机器人侧的DI1和DI2是否相应变化,若变化则表明通信建立成功。
理解以上步骤,工程师可以有效地设置FANUC机器人与西门子PLC之间的MODBUS TCP通信,实现两者间的IO信号交互。这种通信方式广泛应用于自动化生产线中,用于控制机器人执行特定任务或获取机器人的状态信息。
FANUC 机器人 MODBUS TCP 通信配置方法(示教器实物演示)
机器人一侧的配置:
如下图所示,示教器上找到设置—主机通讯,
如下图所示,选择第一项 TCP/IP,点击详细进入配置界面,
下载后可阅读完整内容,剩余9页未读,立即下载
2687 浏览量
521 浏览量
5192 浏览量
2022-06-15 上传
2098 浏览量
2780 浏览量

AAA_自动化工程师
- 粉丝: 7196
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索Lua语言中的Brotli压缩技术
- C#基础教程:创建第一个HelloWorldApp程序
- Go语言实现的Parcel,成就新一代JMAP服务器
- Elixir + Phoenix构建火箭支付付款API指南
- Zeebe 0.20.0版本发布,微服务编排工作流引擎
- MATLAB工具clip2cell: Excel数据剪贴板转单元格数组
- skEditor:多功能开源文本编辑器解析
- 为《我们之中》添加小丑角色的Jester插件指南
- MATLAB中TProgress工具:文本形式显示多进程进度
- HTML诊断:技术分析与问题解决指南
- Camunda Operate 1.0.0发布:微服务工作流引擎的新选择
- 增量备份工具Droplet-backup:跨平台兼容性与高效数据管理
- TenX管道:10x Genomics单细胞RNA测序数据分析
- 量化全球水资源可及性与影响因素
- 提高cifar-10数据集下载效率的压缩文件共享
- MATLAB编程技巧:实现超时用户输入功能
