




下肢外骨骼步态规划研究:ZMP实时校正策略
版权申诉
PDF格式 | 5.13MB |
更新于2024-06-18
| 121 浏览量 | 举报
"这篇毕业论文主要探讨了基于动作捕捉系统的下肢外骨骼的步态规划研究,旨在解决适配性差、稳定性不强和跟随性不足的问题。论文首先对人体下肢运动进行了深入分析,设计出符合人体运动特性的下肢外骨骼结构。利用光学式动作捕捉系统收集正常行走的步态数据,通过数据处理和傅里叶函数拟合为步态规划提供依据。接着,建立了下肢外骨骼的运动学和动力学模型,通过D-H坐标系进行建模,并运用正逆运动学分析和拉格朗日动力学方程进行验证。为了提高行走稳定性,论文采用了倒立摆模型和ZMP实时校正策略。在ADAMS和MATLAB联合仿真的基础上,对比分析了优化前后各关节的运动轨迹,实验结果显示ZMP实时校正策略提高了行走稳定性。关键词包括下肢外骨骼、动作捕捉、ZMP稳定性分析、步态规划和运动仿真。"
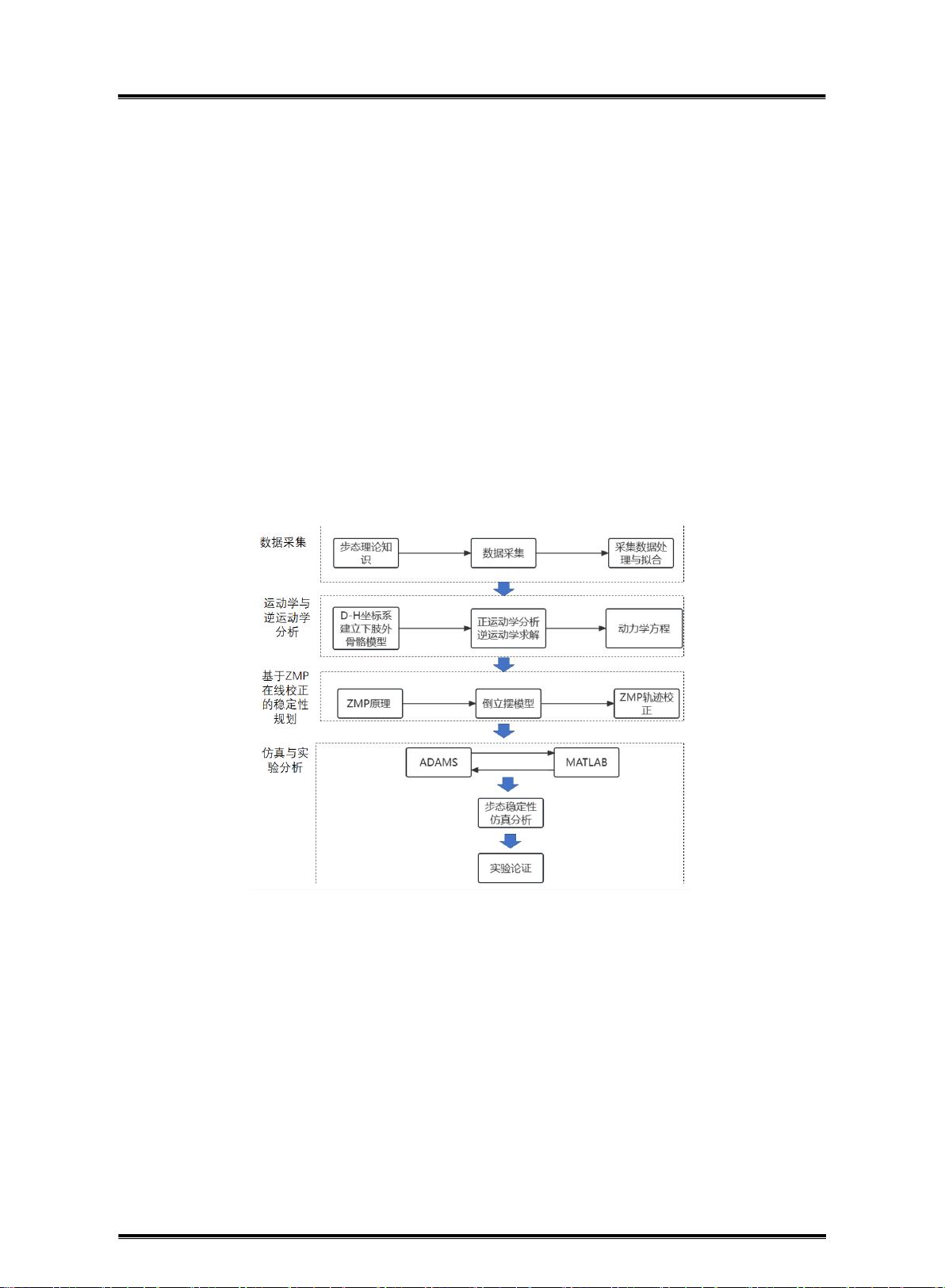
这篇毕业论文详细阐述了如何利用科技手段优化下肢外骨骼的步态规划。作者首先对人体下肢的生物力学特性进行了研究,设计了一款能够紧密配合人体运动的下肢外骨骼结构。通过光学动作捕捉系统,收集了人体正常行走时的步态数据,这些数据经过三项样条插值法填充缺失值、平滑处理和傅里叶函数拟合,为后续的步态规划提供了精确的数据基础。
接下来,论文构建了下肢外骨骼的运动学和动力学模型,采用标准的Denavit-Hartenberg(D-H)参数法进行建模,进行正逆运动学分析,利用MATLAB的Robotics Toolbox进行模型验证。进一步,通过拉格朗日法建立了动力学方程,以全面理解外骨骼的动力行为。
在稳定性方面,论文引入了倒立摆模型,结合Zero Moment Point (ZMP) 稳定性理论,提出了ZMP实时校正策略,优化实际输出的步态轨迹,以增强行走过程中的稳定性。通过ADAMS软件进行运动仿真,比较了ZMP校正前后的关节运动轨迹,实验结果证实了这一方法的有效性。
总体来说,这篇论文通过结合生物力学、运动学、动力学和控制理论,成功地设计了一个能够更好地适应人体步态、具有更高稳定性的下肢外骨骼系统,对于医疗康复、工业应用以及日常生活中的下肢辅助设备有着重要的实践意义。
江汉大学硕士研究生学位论文
第9页
此类算法首先需要提前确定模型的各种参数、其末端位姿及运动轨迹,并对各关
节进行条件约束,结合动力学知识对模型进行验证解析,从而得到各关节的运动规律,
其优势在于模型的建立,与实际条件相结合,所获得的数据更加精准,其不足在与模型
建立的复杂性。
1.3.4 ZMP
稳定性
ZMP 表示行走时的稳定点,又称零力矩点
[36]
,是在下肢外骨骼在不会发生侧翻的
情况下,计算地面对下肢外骨骼合力的作用点,在下肢外骨骼进行动态运动时,即存在
加速度,地面的作用力以 ZMP 为作用点,与重力和惯性力保持平衡。对步态稳定性规
划的方法有 ZMP 预观控制、ZMP 在线校正及在线 ZMP 自适应规划。
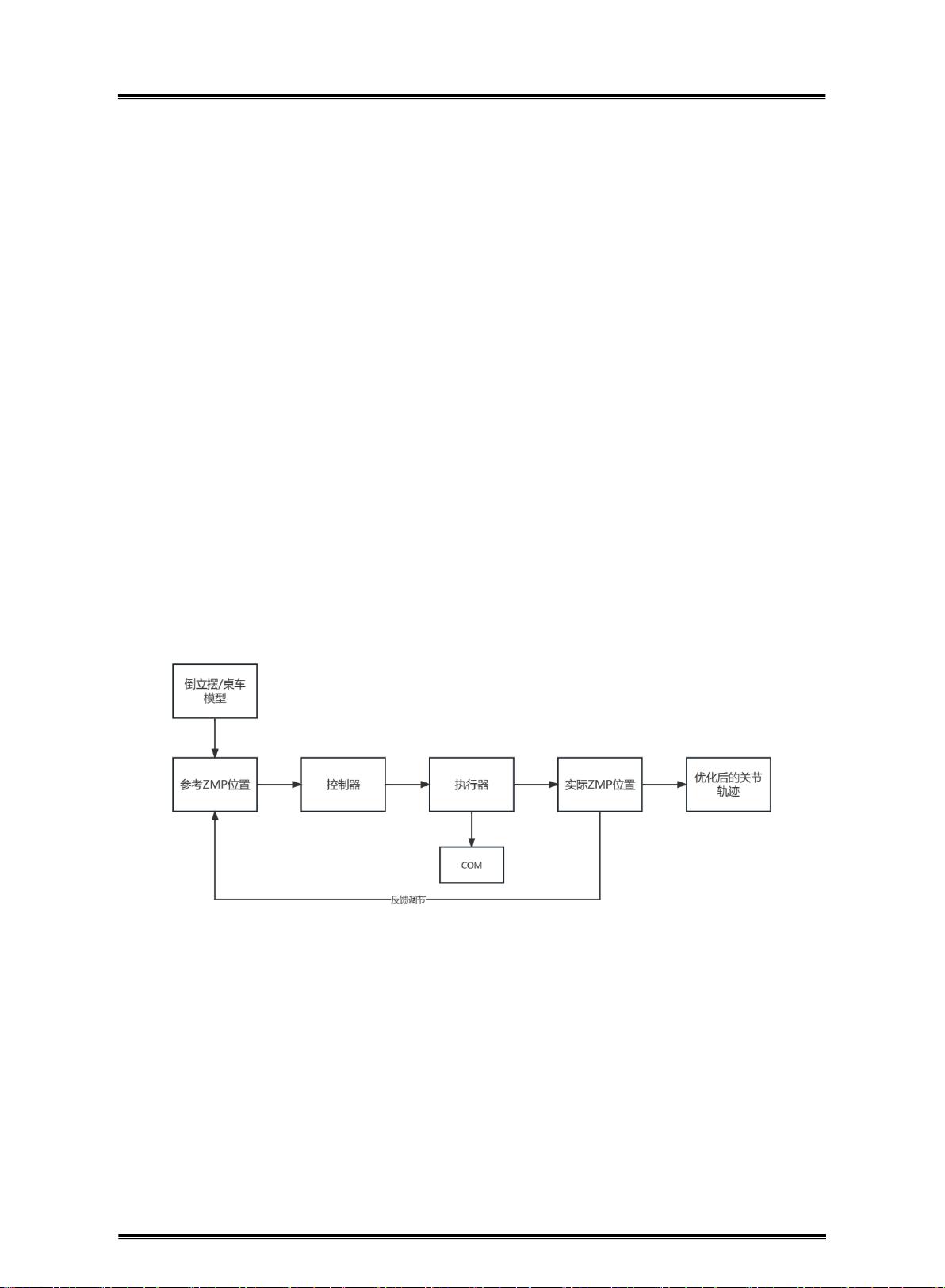
ZMP 预观控制法是在倒立摆模型或桌车模型的基础上,推导出 ZMP 位置同质心
的运动方程
[36]
。在运动过程中,实际的 ZMP 位置会随着环境或运动节奏的改变而改变,
所以需要是实际 ZMP 点的位置尽可能的与 ZMP 参考点的位置相重合,这样才能减小
误差,增强稳定性。如图 1-11 所示。根据期望的 ZMP 位置计算出质心的运动情况与实
际 ZMP 位置,并反馈 ZMP 位置。
图 1-11 ZMP 流程图
文献[37]中提在上下楼梯过程中零点力矩会受到不稳定干扰,从而使得实际 ZMP
轨迹与规划的 ZMP 轨迹间产生较大的误差,为减小误差提高稳定性,运用在线 ZMP
校正进行实时调节。其主要步骤是先建立 5 连杆运动模型;然后运用 5 次样条法来规
划下肢外骨骼各关节的关节轨迹;根据压力传感器所测值计算实际 ZMP 轨迹;进行实
时调节各关节角度校正 ZMP 实际位置与规划位置的误差。
相比之下,在线 ZMP 校正能更好的处理不同情况下路面干扰,实时对步态进行调
整,从而提高步态稳定性。如在平滑路面行走时,可以调节步长来保持其稳定性
[38]
;在


剩余86页未读,继续阅读
相关推荐




xox_761617
- 粉丝: 31
 我的内容管理
展开
我的内容管理
展开








最新资源
- MyBatis自动化代码生成工具使用指南
- 《计算机组成与设计:硬件、软件接口》完整答案解析
- OpenGL库文件及其安装配置指南
- 深入学习Linux与UNIX Shell编程技术
- HTC游戏开发者的开源宝藏:VRTK_Unity3D插件
- 前端JavaScript实现无刷新分页技术集锦
- Halcon技术在实时视频显示中的应用研究
- 蓝牙模块HC-05配置工具:串口调试软件V2.4
- OAuth2.0与Spring Cloud构建高效权限管理系统
- 深入浅出Ganglia监控工具应用与源码解析
- 掌握Oracle SQL分页技术与内置函数应用
- Android动画进度条功能实现与下载指南
- 新唐NUC980代码更新工具NuWriter发布
- 空中鼠标电路与C语言程序解析
- 深入了解C++开源日志库log4cpp及其应用
- Netty入门案例讲解与客户端交互实现






















