V-REP BubbleRob教程:初学者的仿真指南
需积分: 50 85 浏览量
更新于2024-07-18
7
收藏 3.04MB PDF 举报
"这篇教程是针对初学者的Vrep学习资料,主要讲解如何使用Vrep进行运动学和动力学仿真实验,特别是通过 BubbleRob 机器人的设计来介绍Vrep的功能。教程中会涉及到Vrep的基本操作,如添加几何形状、调整属性、启动模拟以及处理碰撞响应等。"
在Vrep初学入门的过程中,首先你需要了解的是Vrep的基础界面和操作。Vrep是一款强大的机器人仿真软件,它允许用户创建和模拟复杂的机器人系统。在这个“BubbleRob教程”中,你将学习如何设计一个简单的移动机器人,并探索Vrep的各种功能。
开始时,你需要启动Vrep,这将显示默认的空白场景。为了构建BubbleRob的本体,你将从添加基本形状开始,比如球体。在菜单栏选择“添加”->“基本形状”->“球”,然后调整尺寸,这里设置直径为0.2。创建的球体会默认具有动力学和响应特性,这意味着它可以在仿真环境中滚动并与其他物体发生碰撞。
在Vrep中,对象被分类为静态和非静态,以及响应和非响应。静态物体在模拟中位置固定,非静态物体则会受到重力或其他约束的影响。响应物体之间会产生碰撞反应,这可以通过设置形状的动力学属性对话框来调整。例如,你可以开启或关闭对象的碰撞响应、测量、渲染和探测属性。
教程中提到,你可以通过复制和粘贴球体来模拟碰撞效果。在停止模拟后,复制的球体会被自动删除,但这一行为可以通过修改模拟对话框的设置来改变。此外,你还可以对球体进行进一步的定制,比如改变其形状和外观,这可以通过位置和变换对话框来实现。
在更深入的学习中,你将接触到Vrep的其他计算模块,比如最小距离计算模块,这有助于处理BubbleRob与其他物体的交互。这些模块扩展了Vrep的功能,使得你可以进行更复杂的机器人行为模拟。
Vrep初学入门的关键在于熟悉软件的操作流程,理解物体的属性设定,以及如何进行有效的仿真和交互。通过 BubbleRob 的构建,你将逐步掌握Vrep的核心技能,为进一步的机器人仿真实验打下坚实基础。
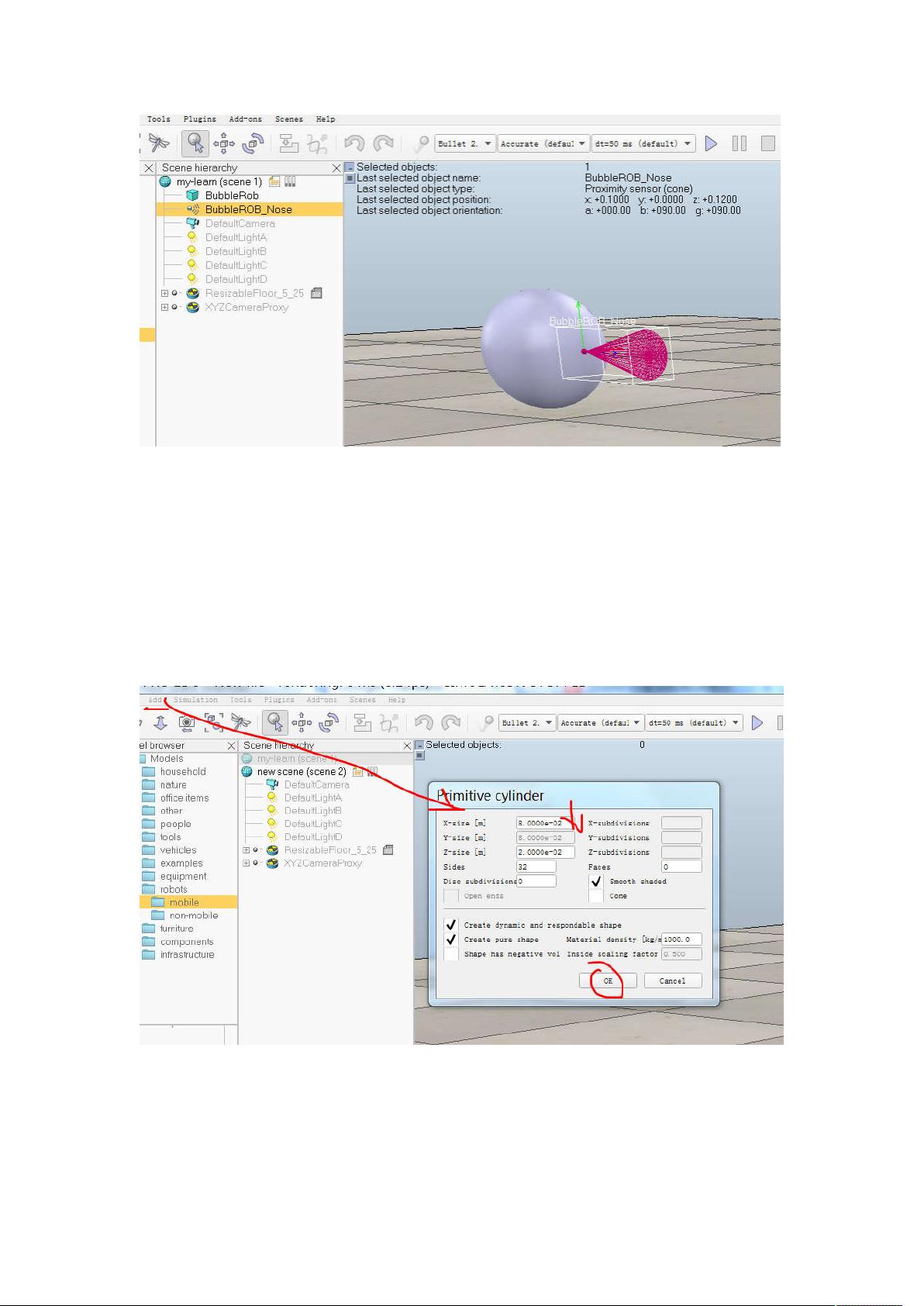
三,添加轮子和电机
接下来,我们开始设计 BubbleRob 的轮子。我们与[菜单栏 - >文件 - >新建场景] [Menu bar -->
File --> New scene]一个新的场景。
通常来讲在模拟器中操作多个场景是非常容易的。我们添加一个尺寸(0.08,0.08,0.02),原
始的圆柱体。安装在 BubbleRob 的身上,我们使能该圆柱体可碰撞,可衡量,可渲染和可探
测属性(Collidable, Measurable, Renderable and Detectable)。
剩余34页未读,继续阅读
2023-11-25 上传
2024-01-28 上传
2023-07-08 上传
2023-04-21 上传
2023-03-16 上传
2023-04-25 上传

折宝林
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
