6.5MN模锻液压机活动横梁纠偏建模与MATLAB仿真研究
版权申诉
62 浏览量
更新于2024-06-19
收藏 2.18MB PDF 举报
"这篇毕业论文主要探讨了基于MATLAB的6.5MN模锻液压机活动横梁的混合纠偏建模与仿真技术。随着锻压行业对精度需求的提升,模锻液压机活动横梁的停位精度与偏转控制精度变得至关重要。现有的高精度模锻液压机通常配备了位置和偏转跟踪与纠正装置。本文以6.5MN的模锻液压机为研究主体,进行了数值仿真研究。
研究内容主要包括活动横梁的位置控制和偏转控制两个方面,并分析了它们之间的相互影响。作者对这一多维、大惯量、高刚度、高摩擦和非线性的控制系统进行了深入研究,其中包含了未知载荷的位移转动控制问题。通过运用相似原理,对650MN巨型模锻压机进行了模型构建,借鉴了现有的技术和文献,结合机械、液压和测控领域的知识,初步建立了模锻压机的系统模型。
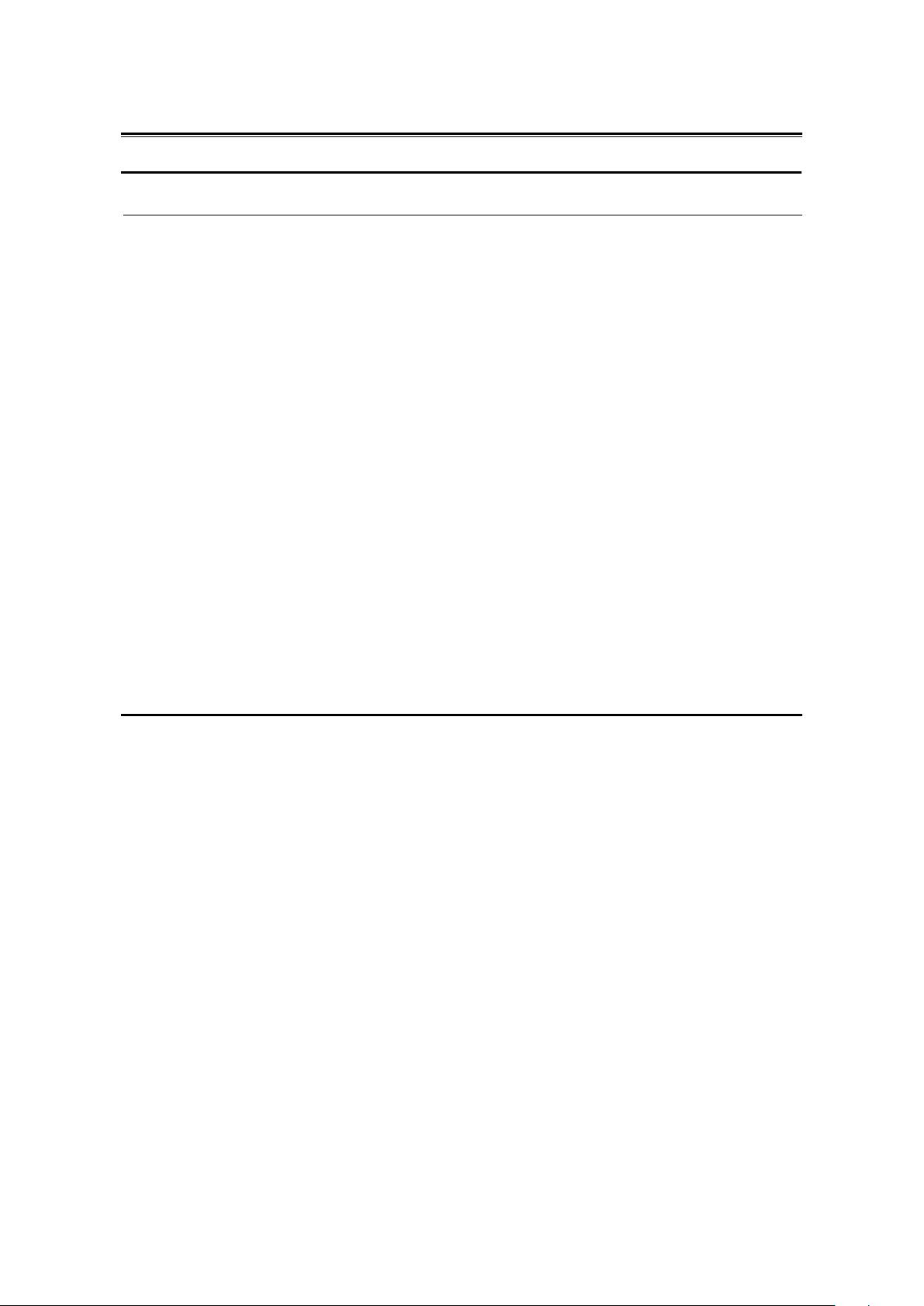
首先,论文基于现有的技术资料和文献获取了6.5MN模锻液压机的整体结构参数,重新设计了检测元件和液压执行元件,重构了纠偏系统的液压原理图。通过解析法建立数学模型,并利用MATLAB/Simulink进行仿真,分析了关键元件和同步平衡系统在简单工况下的动态特性,旨在实现精度优化的同时保证系统稳定性。
接着,为了简化控制模型,论文首先考虑了不包含动梁的大惯性环节的多缸同步控制问题,动梁被视为负载干扰。提出了两种多缸耦合连接方式:对角线和主从结构。随后,论文加入了活动横梁环节,建立了完整的系统仿真模型,对活动横梁的位移和偏转进行了仿真和模拟。
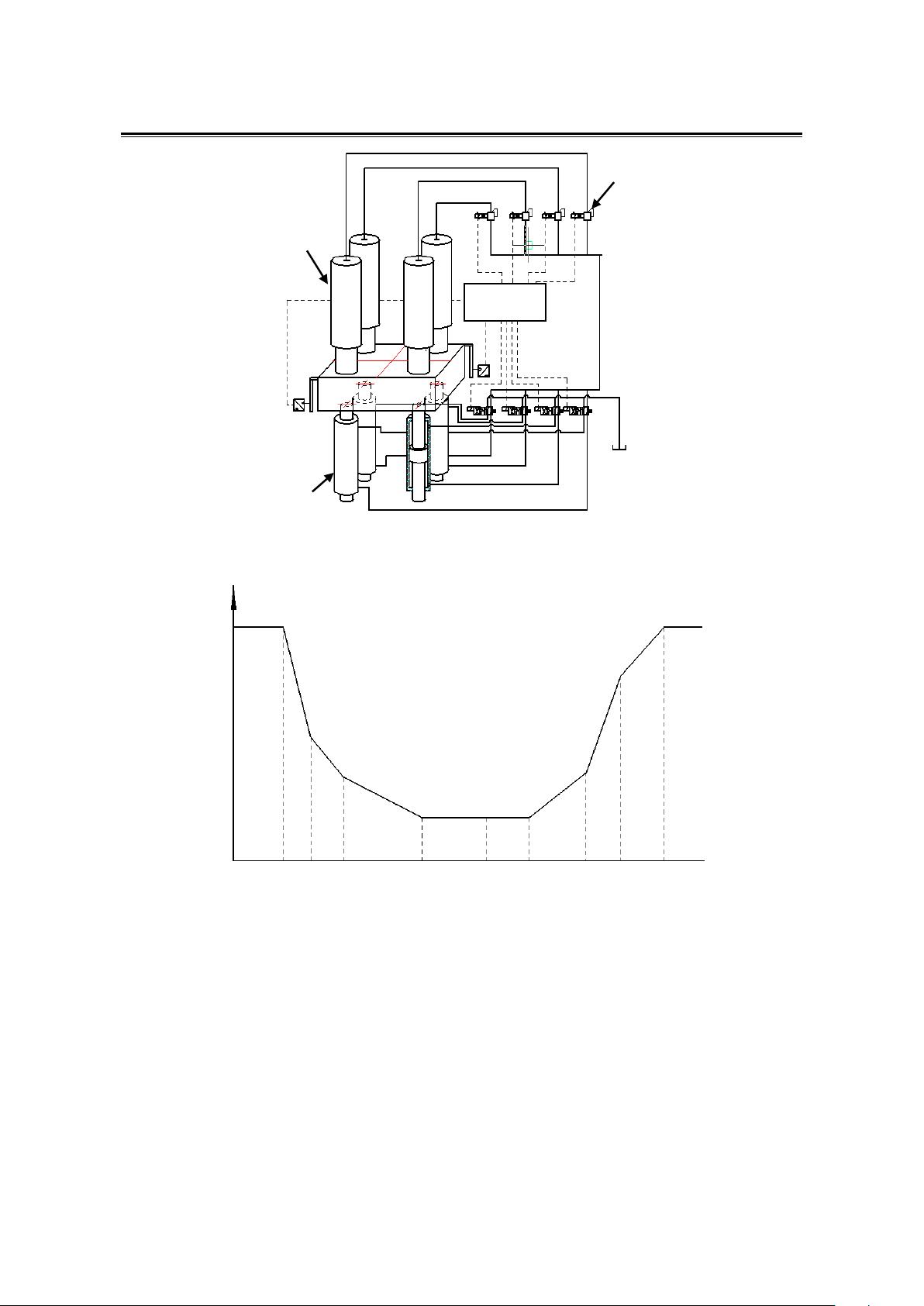
论文的核心内容之一是动梁的纠偏控制,分为位置控制和纠偏控制两部分。通过添加简单的PID控制策略模拟了单边偏载工况,结果显示PID控制能改善位移跟随误差和偏转角,但无法完全消除。在没有加载控制器的情况下,X轴正半轴的设定偏载工况下,工作缸的位移最终达到约39.89mm,位移跟踪误差保持在1.03×10^-4m范围内,X轴转角接近零。
这篇论文为模锻液压机的纠偏控制提供了理论基础和实用方法,对提升模锻液压机的精度控制具有重要的实践意义。"
燕山大学工学硕士学位论文
- 8 -
第 2 章 6.5MN 模锻液压机控制方案
2.1 引言
模锻液压机种类有很多,典型的现代模锻液压机组包括液压机、锻造操作机、
液压系统、送料系统、电控系统、操作监控系统等。本文研究对象为 6.5MN 多向模
锻液压机,采用组合式框架式结构。工作时可进行垂直和水平两个方向的进给。根
据生产需要该机可完成多种工序,例如多向模锻、普通模锻、闭塞锻造、挤压及板
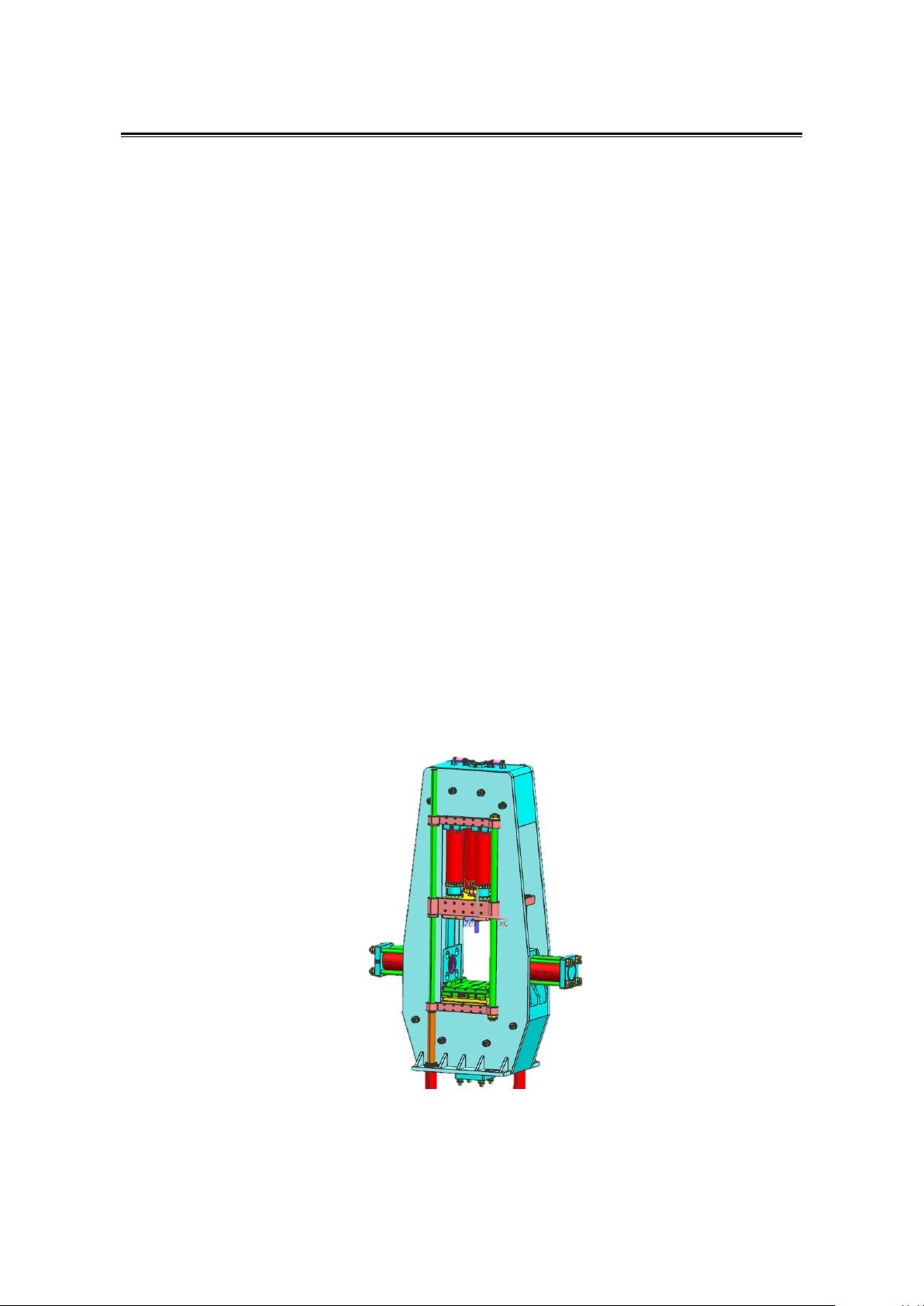
材拉伸等功能。工作部分由四个均布柱塞工作缸和中间穿孔缸组成。根据生产需要
该机可完成多种工序,例如多向模锻、普通模锻、闭塞锻造、挤压及板材拉伸等功
能。6.5MN 模锻液压机三维图见 2-1。
2.2 液压机技术参数
在介绍参数之前,有必要对“相似理论
[22]
”进行介绍。
考虑到原型试验的成本、风险、可行性等问题,在进行实验的时候可进行模拟
实验,模拟实验的基础就是“相似理论”。一般先设计模型,然后进行加载测试,用
获得的模型试验的数据推算原型,得到经验公式
[23]
。虽然“相似理论”并未被广泛
普及,但是科研的过程中会使用到这一理论。
图 2-1 6.5MN 多向模锻液压机三维图

剩余81页未读,继续阅读
2024-10-30 上传
2024-10-30 上传
2024-10-30 上传
2019-11-01 上传
106 浏览量
2023-07-10 上传


icwx_7550592
- 粉丝: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- pymatgen库安装指南:适用于macOS的Python扩展
- 深入解析MySQL分区及其优化应用
- Python挑战:深入解压缩包子文件技术
- 提升读写速度的DELL H310/H710磁盘阵列驱动
- 响应式视差效果的6页模板设计与CSS应用
- 电子企业商务网页模板设计指南
- CSS技术应用:tarea-clase-8解析
- Python库PyMatching-0.2.2版本安装包发布
- STM8CubeMX软件安装包 - PC端初始化代码生成器
- Parsley开源工具的源码分析
- 生化试剂指南:现代化学试剂手册第三分册详述
- UnCT:开源的通用系统管理与配置工具
- BSumangHelloWorld:Java语言入门测试示例
- 深入解析HTML格式化技术要点
- Python脚手架:轻松构建深度学习模型的解决方案
- STM32F103驱动AGS01DB传感器实现IIC通信测量TVOC与CO2
