Analog Devices的Blackfin DSP处理器详解
需积分: 1 19 浏览量
更新于2024-07-26
收藏 3.56MB PDF 举报
"Blackfin DSP处理器,ADSP-BF504/ADSP-BF504F/ADSP-BF506F数据表"
Blackfin DSP(Digital Signal Processor)是由Analog Devices公司开发的一种高性能嵌入式处理器,旨在处理数字信号处理任务。Blackfin系列处理器以其独特的架构融合了DSP和微控制器的功能,使其在音频、视频、图像处理以及通信等领域有着广泛的应用。
标题提及的ADSP-BF504、ADSP-BF504F和ADSP-BF506F是Blackfin家族中的特定型号,它们在Rev.A版本的数据表中进行了详细描述。这些处理器具有以下关键特性:
1. **高性能Blackfin处理器**:这三款处理器的时钟频率高达400MHz,提供高速计算能力,适用于实时处理复杂算法。
2. **强大的硬件加速器**:每个Blackfin处理器配备了两个16位乘累加单元(MACs)、两个40位算术逻辑单元(ALUs)以及四个8位视频ALUs,这样的配置使得它们在处理多媒体和信号处理任务时效率极高。
3. **40位移位器**:40位的移位器允许进行大范围的数据操作,提高了数据处理的灵活性和精度。
4. **RISC-like架构**:Blackfin处理器采用类似于精简指令集计算机(RISC)的架构,简化了编程,并有利于编译器优化,从而提升软件开发效率。
5. **高级调试和性能监控**:集成的调试、追踪和性能监测功能为开发者提供了强大的工具,帮助他们优化代码,找出潜在问题。
6. **电源电压适应性**:这些处理器可以接受不同范围的供电电压,适应不同的内部和I/O操作需求,增强了系统设计的灵活性。
7. **知识产权保护**:文件指出,Blackfin商标和Blackfin徽标是Analog Devices公司的注册商标,强调了其知识产权的重要性。
尽管数据表中并未详细列出所有规格和功能,但可以推断,Blackfin DSP处理器提供了全面的外设接口、内存管理单元以及高效的能源管理,使其成为各种嵌入式应用的理想选择。在实际应用中,这些处理器常用于视频编码/解码、语音处理、图像分析、网络协议处理等场景。用户在使用时应遵守Analog Devices提供的规格和条款,同时注意可能涉及的专利侵权风险。Analog Devices公司不对其使用承担责任,也不默示提供任何专利许可。如需了解更多详细信息,可以访问Analog Devices的官方网站获取完整数据表和技术支持。

Rev. A | Page 13 of 80 | July 2011
ADSP-BF504/ADSP-BF504F/ADSP-BF506F
Each mailbox consists of eight 16-bit data words. The data is
divided into fields, which includes a message identifier, a time
stamp, a byte count, up to 8 bytes of data, and several control
bits. Each node monitors the messages being passed on the net-
work. If the identifier in the transmitted message matches an
identifier in one of its mailboxes, the module knows that the
message was meant for it, passes the data into its appropriate
mailbox, and signals the processor of message arrival with an
interrupt.
The CAN controller can wake up the processor from sleep mode
upon generation of a wake-up event, such that the processor can
be maintained in a low-power mode during idle conditions.
Additionally, a CAN wake-up event can wake up the on-chip
internal voltage regulator from the powered-down
hibernate state.
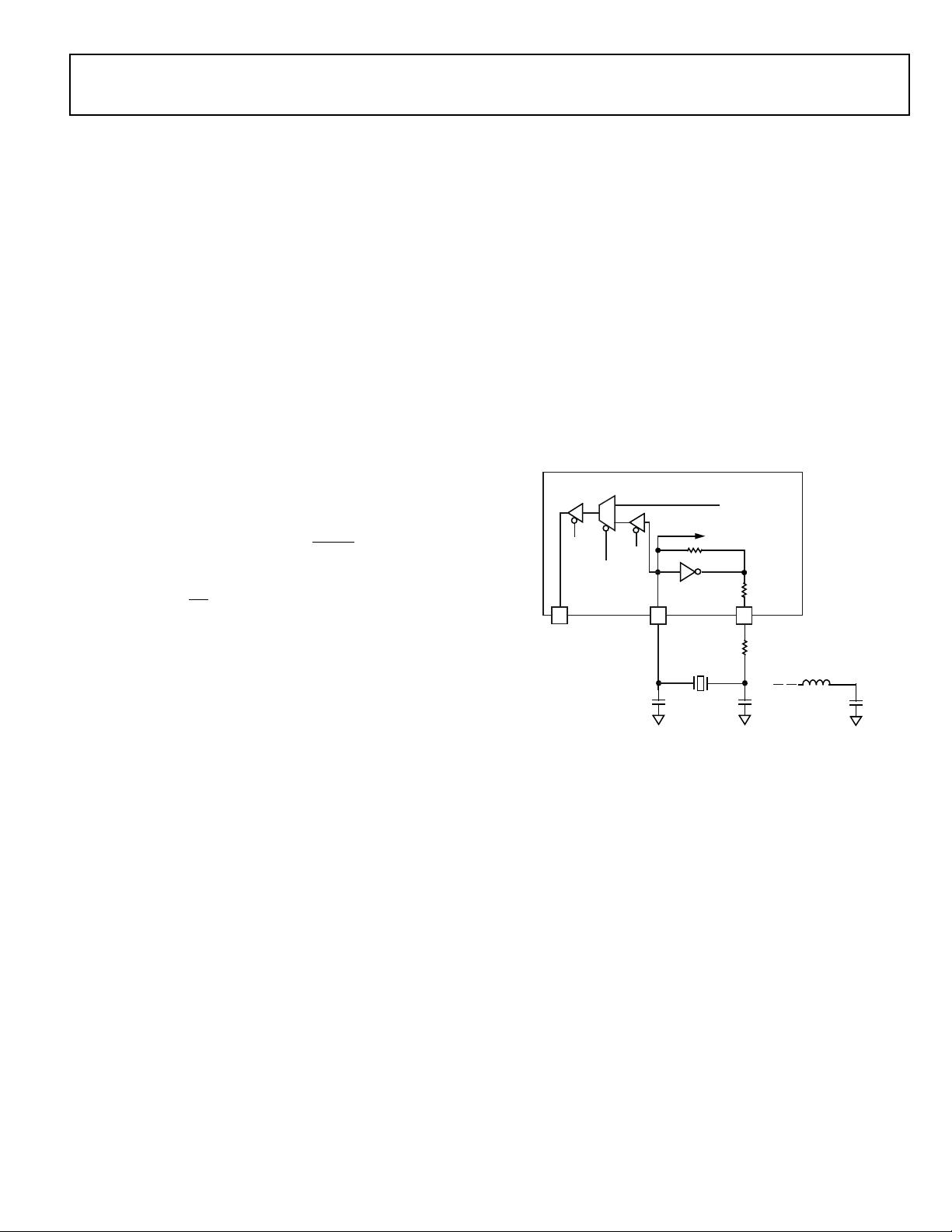
The electrical characteristics of each network connection are
very stringent. Therefore, the CAN interface is typically divided
into two parts: a controller and a transceiver. This allows a sin-
gle controller to support different drivers and CAN networks.
The ADSP-BF50x CAN module represents the controller part of
the interface. This module’s network I/O is a single transmit
output and a single receive input, which connect to a line
transceiver.
The CAN clock is derived from the processor system clock
(SCLK) through a programmable divider and therefore does not
require an additional crystal.
TWI CONTROLLER INTERFACE
The processors include a 2-wire interface (TWI) module for
providing a simple exchange method of control data between
multiple devices. The TWI is compatible with the widely used
I
2
C
®
bus standard. The TWI module offers the capabilities of
simultaneous master and slave operation, support for both 7-bit
addressing and multimedia data arbitration. The TWI interface
utilizes two pins for transferring clock (SCL) and data (SDA)
and supports the protocol at speeds up to 400K bits/sec. The
TWI interface pins are compatible with 5 V logic levels.
Additionally, the TWI module is fully compatible with serial
camera control bus (SCCB) functionality for easier control of
various CMOS camera sensor devices.
PORTS
Because of the rich set of peripherals, the processor groups the
many peripheral signals to three ports—Port F, Port G, and
Port H. Most of the associated pins are shared by multiple sig-
nals. The ports function as multiplexer controls.
General-Purpose I/O (GPIO)
The processor has 35 bidirectional, general-purpose I/O (GPIO)
pins allocated across three separate GPIO modules—PORTFIO,
PORTGIO, and PORTHIO, associated with Port F, Port G, and
Port H, respectively. Each GPIO-capable pin shares functional-
ity with other processor peripherals via a multiplexing scheme;
however, the GPIO functionality is the default state of the device
upon power-up. Neither GPIO output nor input drivers are
active by default. Each general-purpose port pin can be individ-
ually controlled by manipulation of the port control, status, and
interrupt registers:
• GPIO direction control register – Specifies the direction of
each individual GPIO pin as input or output.
• GPIO control and status registers – The processor employs
a “write one to modify” mechanism that allows any combi-
nation of individual GPIO pins to be modified in a single
instruction, without affecting the level of any other GPIO
pins. Four control registers are provided. One register is
written in order to set pin values, one register is written in
order to clear pin values, one register is written in order to
toggle pin values, and one register is written in order to
specify a pin value. Reading the GPIO status register allows
software to interrogate the sense of the pins.
• GPIO interrupt mask registers – The two GPIO interrupt
mask registers allow each individual GPIO pin to function
as an interrupt to the processor. Similar to the two GPIO
control registers that are used to set and clear individual
pin values, one GPIO interrupt mask register sets bits to
enable interrupt function, and the other GPIO interrupt
mask register clears bits to disable interrupt function.
GPIO pins defined as inputs can be configured to generate
hardware interrupts, while output pins can be triggered by
software interrupts.
• GPIO interrupt sensitivity registers – The two GPIO inter-
rupt sensitivity registers specify whether individual pins are
level- or edge-sensitive and specify—if edge-sensitive—
whether just the rising edge or both the rising and falling
edges of the signal are significant. One register selects the
type of sensitivity, and one register selects which edges are
significant for edge-sensitivity.
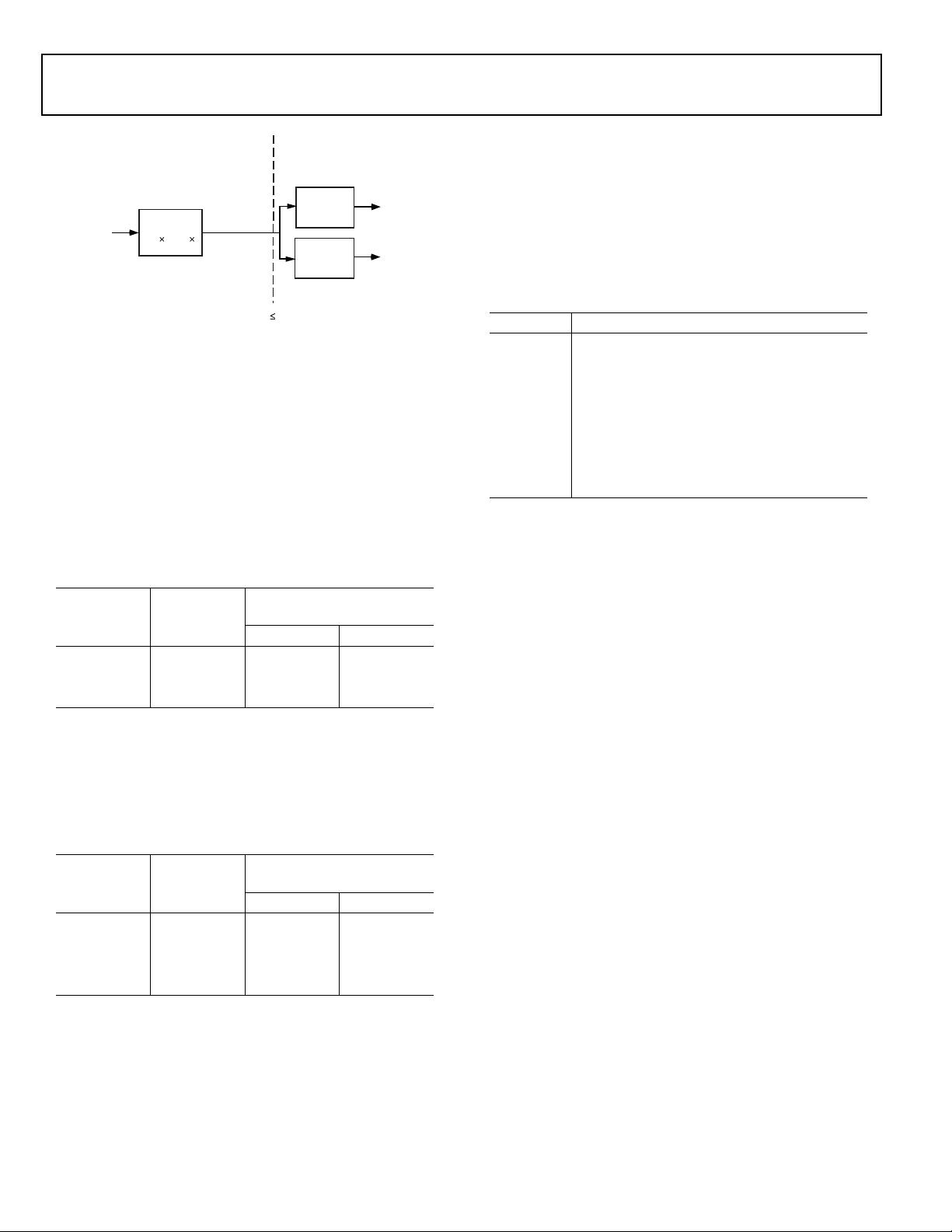
DYNAMIC POWER MANAGEMENT
The processor provides five operating modes, each with a differ-
ent performance/power profile. In addition, dynamic power
management provides the control functions to dynamically alter
the processor core supply voltage, further reducing power dissi-
pation. When configured for a 0 volt core supply voltage, the
processor enters the hibernate state. Control of clocking to each
of the processor peripherals also reduces power consumption.
See Table 4 for a summary of the power settings for each mode.
Full-On Operating Mode—Maximum Performance
In the full-on mode, the PLL is enabled and is not bypassed,
providing capability for maximum operational frequency. This
is the power-up default execution state in which maximum per-
formance can be achieved. The processor core and all enabled
peripherals run at full speed.
Active Operating Mode—Moderate Dynamic Power
Savings
In the active mode, the PLL is enabled but bypassed. Because the
PLL is bypassed, the processor’s core clock (CCLK) and system
clock (SCLK) run at the input clock (CLKIN) frequency. DMA
access is available to appropriately configured L1 memories.

剩余79页未读,继续阅读
2010-12-28 上传
2011-08-01 上传
2009-05-13 上传
2023-04-24 上传
2023-06-11 上传
2023-12-04 上传
2023-05-20 上传
2023-07-28 上传
2024-11-04 上传

jebin_d
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
