增强探索法加速Petri网AI规划:从模型到PDDL应用
59 浏览量
更新于2024-06-17
收藏 626KB PDF 举报
本文主要探讨了Petri网在计算机科学领域的应用,特别是针对有限状态系统中的问题解决策略。Petri网是一种强大的工具,用于分析和建模分布式系统,它通过图形化的元素(包括place和transition)来描述系统的行为。在分析过程中,寻找特定标记的过程可以转化为在状态空间中寻找可达标记集的问题。
传统的Petri网探索方法,如可达性分析,通常是无向的,即不依赖网络结构的特性进行搜索。然而,这种方法可能效率不高,尤其是在大型或复杂的网络中。因此,作者提出了一种启发式搜索的增强探索方法,旨在利用Petri网的结构信息来优化搜索策略,从而提高搜索效率。这种方法根据不同系统的需求,考虑了不同类型的估计,比如基于转换触发的动态分析。
作者将转换的触发看作是对一系列根据Petri网结构和当前标记定义的谓词的操作,这使得可达性分析可以被转化为人工智能(AI)规划问题中的寻找计划任务。这种转换使得AI规划技术,特别是行动规划(如Planning Domain Description Language, PDDL)中的算法能够应用到Petri网的探索中。PDDL是一种标准的规划语言,它为描述问题提供了标准化框架。
文中详细讨论了如何将Petri网转换成PDDL语言,包括一般位置转换网(Level2PDDL2.2)的简洁编码以及有界位置转换网(ADL/BSPS)的规范化表示。通过这种方式,研究者可以利用现有的规划器对这些问题进行求解,展示了一种潜在的结合传统模型检测技术和AI规划的强大工具。
实验部分,作者展示了初步的实验结果,比较了新提出的启发式搜索探索方法与传统方法在处理Petri网问题上的性能。这些实验旨在验证增强探索的有效性和实用性,为实际系统开发提供了有价值的参考。
总结来说,这篇文章深入研究了如何通过增强Petri网的探索方法来解决AI规划问题,并展示了如何将Petri网与PDDL语言相结合,以便利用现代规划技术加速问题求解。这对于理解和优化分布式系统,尤其是那些具有复杂行为模式的系统具有重要意义。同时,它也为未来在计算机科学领域内的进一步研究和实践开辟了新的方向。
6
S. Edelkamp
,
S.Jabbar/Electronic Notes in Theoretical Computer Science 149
(
2006
)
3
、
Q
、
→
→
→
Ⓧ
·
...
...
Ⓧ
·
你
好
,
Ⓧ
...
...
Ⓧ
...
...
Ⓧ
,
,
,
,
,
,
,
Ⓧ
.
.
.
你
好
,
、
、
、
ı
ı
ı
、
、
、
、
、
、
...
...
.
.
、
、
但
是
,
、
、
、
、
,
,
。
,
。
、
、
、
Q
,
ı
ı
ı
Q
Q
,
Q
,
Q
.
.
Q
,
,
、
、
、
、
.
.
.
.
、
、
,
,
,
、
、
...
...
.
,
。
、
、
,
你
...
你
好
。
.
.
.
、
、
,
,
别
这样
,别
这样
,
...
...
.
.
,
,
、
、
、
好
吧,
好
吧,
,
,
。
.
.
、
、
、
、
、
、
你
好
,
.
.
.
、
、
、
、
、
、
、
、
、
Q
,
你
好
,
但是
,
奎
尔
,
Q
,
r
,
.
、
、
、
、
、
、
但
是
,
、
、
、
、
、
、
Q
rr
r
,
、
、
、
、
、
、
Q
rrr
,
,
你
好
,
,,
你
好
,
,
你
好
,
但是
,
、
、
、
、
、
、
、
、
、
、
、
、
、
、
、
、
、、
Q
,
Q
,
Q
Q
Q
,
Q
,
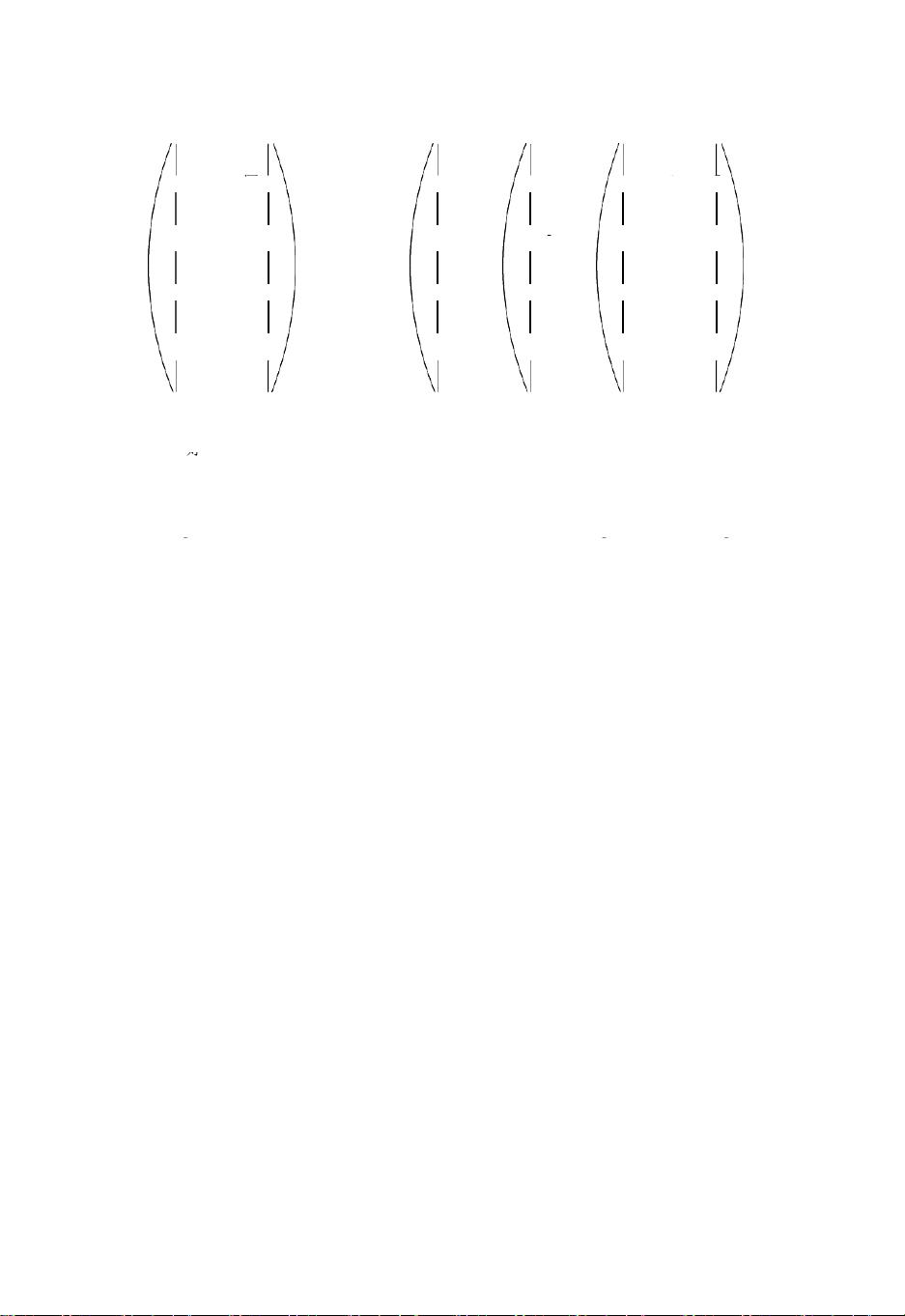
Fig. 1. 2
个和
4
个用餐哲学家的位置转移
Petri
网。
M→M
J
。 一个标记M
J
是
从
M
可达的
,如果M
≠
M
J
,其中
是
的自同构和传递闭包。 地方
的可达集
R(N)
转移网N是从M
0
可到达的所有标记M的集合。一个库所变迁网N是
有界的
,
如果对所有库所p存在一个自然数k,使得对R(N)中的所有M
,
我们有M
(p)
≤
k。 一个过渡t是
活的
,如果
在R(N)中的所有M都有一个M
J
,其中M
∗
M
J
和t在M j中使能。
如果所有的变迁t都是
活的
,则一个位置变迁网N是
活
的。 一个
射击序列
σ = t
1
,
.
,
t
n
从M
0
开始是一个有限的跃迁序列,使得t
i
在M
i
−
1
中使能,M
i
是
在M
i
−
1
中激发
t i
的结果
。
在复杂系统的分析中,
放置
模型条件或对象(如程序变量),改变条件
和对象的值的
转换
模型活动,
以及
表示条件或对象的特定值(如程序变量的
值)的标记
Petri网的图形表示包括用于位置
的圆圈
、用于标记
的点
、用于转换
的矩
形
以及用于位置和转换之间的弧的
箭头
图1中给出了一个普通的地点变迁
Petri网的例子,用于有2个和4个哲学家的哲学家用餐的例子。
不同的哲学家
对应不同的列,而行中的位置
表示他们的状态:
思考
,
等待
和
进食
。对于2个
哲学家的情况,标记对应于系统的初始状态,而对于4个哲学家的情况,我
们显示了导致死锁的标记。
Petri网有两种不同的分析方法,
可达集分析
和
不变量分析
。后一种方法
更多地集中在Petri网结构本身。不幸的是,不变量分析仅适用于研究
|
P
| × |
剩余17页未读,继续阅读
2015-04-15 上传
2008-01-31 上传
2023-07-31 上传
2023-06-14 上传
2023-09-10 上传
2023-07-12 上传
2023-04-23 上传
2024-01-16 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
