多相电能计量IC ADE7854/58/68/78中文资料:高精度与功能特性概览
需积分: 10 39 浏览量
更新于2024-07-15
收藏 1.4MB PDF 举报
本文档介绍了Analog Devices公司的多相多功能电能计量集成电路系列,包括ADE7854、ADE7858、ADE7868和ADE7878。这些器件专为电能计量系统设计,提供了高精度测量性能,满足EN50470系列和IEC62053-21/22/23等多个国际标准。
1. **产品特性**:
- 高精度:所有器件都能提供高准确度的有功、无功和视在功率测量,如在25°C下,动态范围内功率误差非常小(0.1%或0.2%)。
- 多种连接选项:兼容三相三线、三相四线(星形或三角形)等不同连接方式。
- 功能多样性:不同型号支持不同的特性和功能,如防窃电检测、低功耗模式、零线电流测量(仅限ADE7868和ADE7878)、波形采样和独立配置的空载阈值。
2. **测量能力**:
- 内置精密模数转换器、数字积分器和信号处理电路,能够测量各相及系统总功率,包括基波和谐波。
- 对于电压和电流,它们能够在1000:1动态范围内提供小于0.1%的有效值误差。
3. **保护与智能功能**:
- ADE7868和ADE7878具备低功耗电池模式,通过监测相电流来防止窃电。
- 支持电池供电,能在全失压情况下工作,确保持续监测。
- 提供相位角测量,典型误差值为0.3°。
4. **电气规格**:
- 工作电压范围广泛,从2.4V到3.7V,具有稳定的1.2V基准电压源。
- 单电源设计,适用于3.3V系统,采用40引脚LFCSP封装,工作温度范围为-40°C至+85°C。
- 支持多种串行接口,如I2C、SPI和HSDC,便于系统集成和通信。
5. **应用领域**:
主要应用于电能计量系统,特别是那些需要精确、可靠和多功能测量的场合,如住宅、商业和工业电力管理。
总结来说,ADE7854_7858_7868_7878是一系列用于电能计量的高性能IC,它们结合了精密的测量技术、灵活的接口和多种安全功能,为能源管理提供了一体化的解决方案。选择哪个型号取决于特定应用的需求,比如是否需要零线电流测量或低功耗防窃电特性。
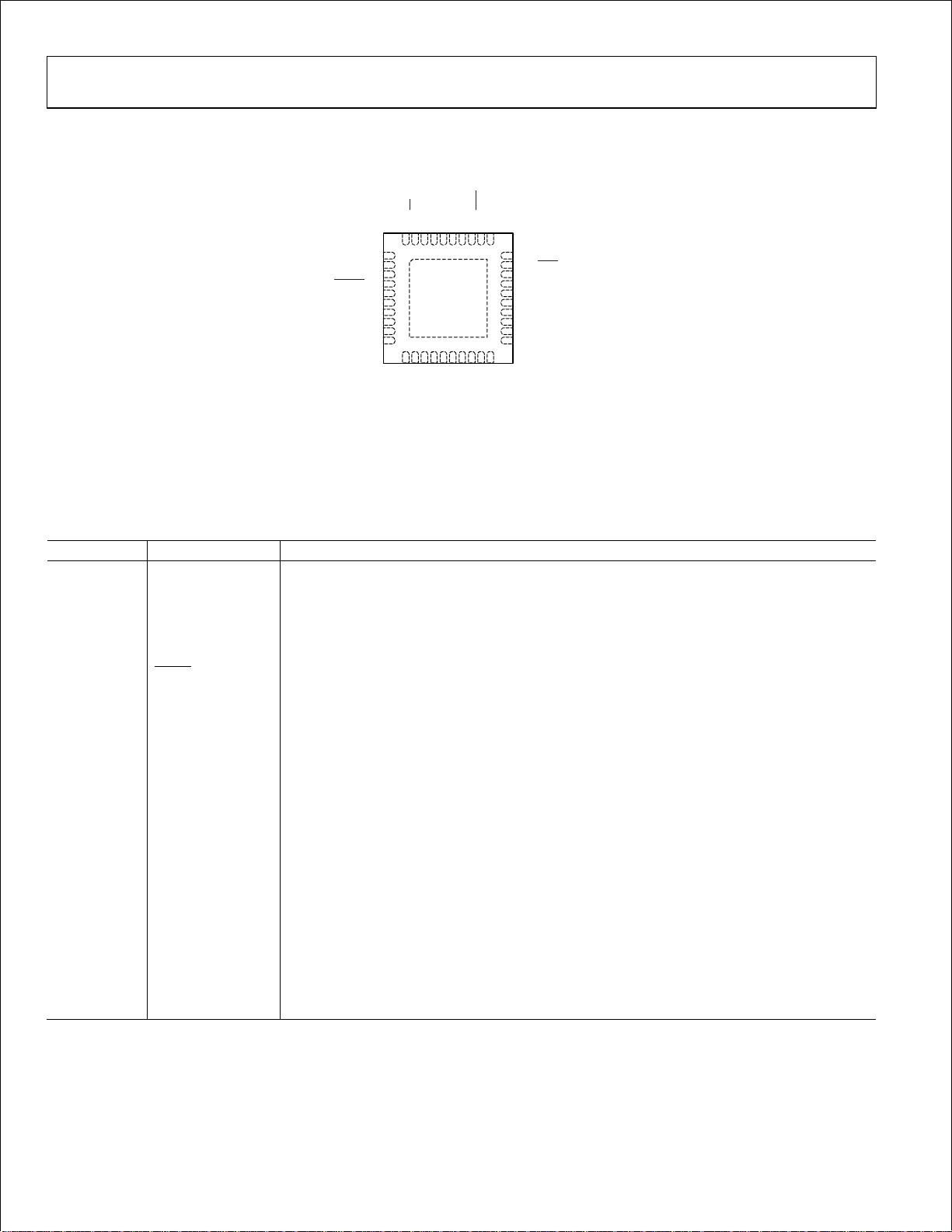
引脚配置和功能描述
N
OTES
1
. NC = NO CONNECT.
2
. CREATE A SIMILAR PAD ON THE PCB UNDER THE
EXPOSED PAD. SOLDER THE EXPOSED PAD TO
THE PAD ON THE PCB TO CONFER MECHANICAL
STRENGTH TO THE PACKAGE. CONNECT THE
PADS TO AGND AND DGND.
11CN
21NBI
31CI P
51NI P
71
FER
TUO/NI
61NNI
81NV
91CV P
02CN
41NCI
NC
PM0
PM1
R
ESET
DVDD
DGND
IAP
IAN
IBP
NC
VAP
AVDD
AGND
VDD
CLKIN
CLKOUT
IRQ0
NC
VBP
NC
33
1FC
43
2FC
53
K
LCSH/3FC
63
CS/KLCS L
73
DSH/OSIM
83
DS/ISOM A
93
SH/SS A
04
CN
23
1QRI
13
CN
08510-106
1
2
3
4
5
6
7
8
9
10
23
24
25
26
27
28
29
30
22
21
ADE78xx
TOP VIEW
(Not to Scale)
图9. 引脚配置
ADE7854/ADE7858/ADE7868/ADE7878
表8. 引脚功能描述
引脚编号 引脚名称 说明
1, 10, 11, 20,
21, 30, 31, 40
NC 不连接。这些引脚不在内部互连。建议将这些引脚接地。
2 PM0
3 PM1
4
RESET
复位输入,低电平有效。在PSM0模式下,此引脚应至少保持低电平10 µs,以触发硬件复位。
5 DVDD
6 DGND 接地基准。此引脚为所有数字电路提供接地基准。
7, 8 IAP, IAN
9, 12 IBP, IBN
13, 14 ICP, ICN
15, 16 INP, INN
17 REF
IN/OUT
Rev. H | Page 16 of 100
功耗模式引脚0。此引脚与PM1配合来定义ADE7854/ADE7858/ADE7868/ADE7878的功耗模式,
如表9所述。
功耗模式引脚1。此引脚与PM0配合来定义ADE7854/ADE7858/ADE7868/ADE7878的功耗模式,
如表9所述。
数字低压差稳压器(LDO)的2.5 V输出。通过将一个4.7 µF电容和一个220 nF陶瓷电容并联对此引
脚去耦。不要将外部有源电路连接至此引脚。
电流通道A的模拟输入。此通道与电流传感器配合使用,在本文中称为“电流通道A”。这些输入
都是全差分电压输入,最大差分电平为±0.5 V。此通道还具有一个内部PGA,与通道B和通道C上
的相同。
电流通道B的模拟输入。此通道与电流传感器配合使用,在本文中称为“电流通道B”。这些输入
都是全差分电压输入,最大差分电平为±0.5 V。此通道还具有一个内部PGA,与通道C和通道A上
的相同。
电流通道C的模拟输入。此通道与电流传感器配合使用,在本文中称为“电流通道C”。这些输入
都是全差分电压输入,最大差分电平为±0.5 V。此通道还具有一个内部PGA,与通道A和通道B上
的相同。
零线电流通道N的模拟输入。此通道与电流传感器配合使用,在本文中称为“电流通道N”。这些
输入都是全差分电压输入,最大差分电平为±0.5 V。此通道还具有一个不同于通道A、B、C所用
的内部PGA。ADE7878和ADE7868上具有零线电流通道。在ADE7858和ADE7854中,将这些引脚
连接到AGND。
通过该引脚可以使用片内基准电压。片内基准电压的标称值为1.2 V。也可以在此引脚上连接1.2 V
± 8%的外部基准电压源。这两种情况下,都要通过将一个4.7 µF电容和一个100 nF陶瓷电容并联
来对此引脚去耦。复位后,使能片内基准电压源。
剩余99页未读,继续阅读
2022-09-14 上传
2022-09-23 上传
2023-10-09 上传
2019-11-18 上传
2022-09-21 上传
2021-07-26 上传
2011-01-10 上传
2022-09-21 上传

qq_34877598
- 粉丝: 2
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
