ARM9嵌入式系统在智能灭火机器人控制器中的应用
193 浏览量
更新于2024-09-03
1
收藏 293KB PDF 举报
"基于ARM9嵌入式系统的智能灭火机器人控制器设计着重于利用高性能微控制器提升机器人的自动化和智能化水平。嵌入式系统结合了多种先进技术,包括计算机技术、通信技术、半导体技术等,使得控制器在硬件和软件层面紧密结合,提升了灭火机器人的性能。"
文章深入探讨了基于ARM9处理器的智能灭火机器人控制器的设计。ARM9是一款广泛应用的微处理器,以其高性能、低功耗和高集成度的特点,成为嵌入式系统中的理想选择,尤其适合实时控制应用。在这个项目中,控制器需要处理来自多个传感器(如红外发射和接收传感器、声音传感器、远红外火焰传感器)的数据,以便机器人能够准确识别火源并避开障碍物。
灭火机器人的结构设计包括关键组件,如用于避障的红外传感器阵列,声音传感器用于启动,以及远红外火焰传感器用于探测火源。为了有效灭火,设计中采用了风扇作为灭火装置,因为它们在实际操作中表现出更高的可靠性。
在总体设计阶段,智能灭火机器人系统的关键在于定位和速度控制。控制器需要提供充足的输入输出接口以连接各种传感器和执行器。选择ARM9处理器是因为它具备强大的浮点运算能力,这对于高速运动环境下的精确控制至关重要。硬件系统还包括其他重要部件,如存储器、电源管理模块、通信接口等,它们共同构成了如图2所示的系统架构。
在硬件设计部分,嵌入式系统的核心是基于ARM9的控制器(例如ST公司的STR911FAM44),它能有效地处理实时任务,支持多任务并具有快速中断响应。周边电路设计还包括存储器(如Flash和RAM)、电源管理单元、以及各种接口,如串行通信接口(UART)、通用输入输出(GPIO)和模拟数字转换器(ADC),这些都为传感器数据的采集和处理提供了必要的支持。
软件方面,通常会涉及到实时操作系统(RTOS)的选择和定制,以实现任务调度、中断处理和传感器数据的高效处理。此外,路径规划算法、火源检测算法和避障策略的开发也是智能灭火机器人控制系统的重要组成部分。通过编程,这些算法可以实现机器人的自主导航和灭火操作。
最后,通过实际实验验证了设计方案的可行性,展示了基于ARM9的嵌入式系统如何成功驱动智能灭火机器人完成任务。这样的研究为未来智能灭火机器人的进一步优化和功能扩展提供了基础和参考。
总结来说,"基于ARM9嵌入式系统智能灭火机器人控制器设计"是一个综合运用了微处理器技术、嵌入式系统设计、传感器技术、控制算法等多个领域的项目,旨在构建一个能够自主导航、精准定位火源并有效灭火的智能机器人。这项工作对于推动嵌入式系统在机器人领域的应用具有重要意义。
基于基于ARM9嵌入式系统智能灭火机器人控制器设计嵌入式系统智能灭火机器人控制器设计
基于ARM9嵌入式系统智能灭火机器人控制器设计
0 引 言
控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能。近几年来随着高性能微控制器和嵌入式系统
技术的不断进步,为各类实时控制应用提供了解决方案。
嵌入式系统(ES)是计算机技术、通信技术、半导体技术、微电子技术、语音图像数据传输技术,甚至传感器等先进技术和具体
应用对象相结合后的系统,其是硬件和软件紧密捆绑在一起的系统。将嵌入式系统应用于灭火机器人的设计中,对机器人的性
能智能化、网络化、小型化都有了明显提高。
比赛用灭火机器人需要机器人有智能较高的自动控制性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源
并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智
能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究
提供了平台。
1灭火机器人的描述
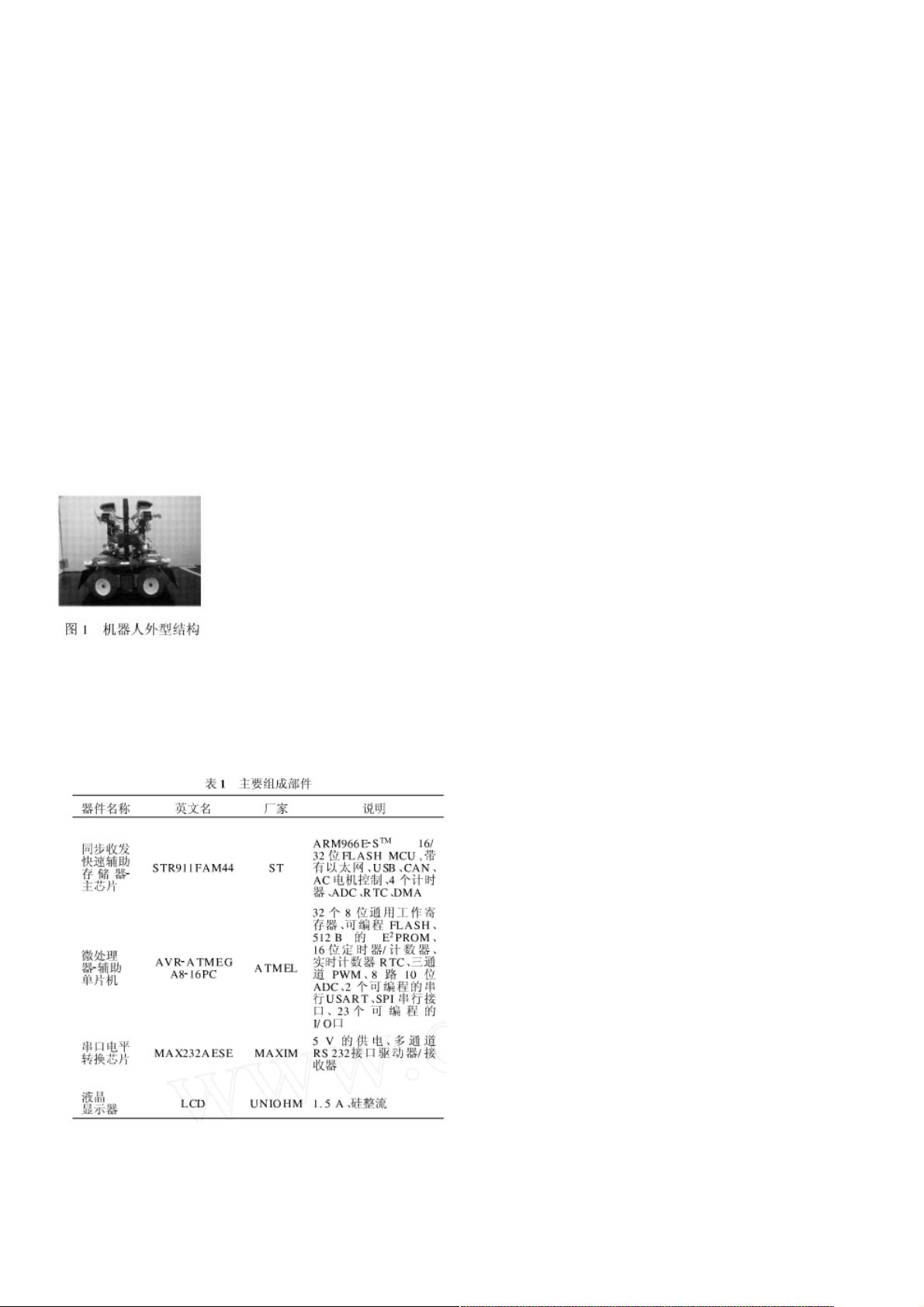
灭火机器人的外形结构如图1所示,它的主要构件有:红外发射传感器(6个),红外接收传感器(6个),声音传感器(1个),灭火
风扇(前后各1个),远红外火焰传感器等(前后各7个)。其中红外发射和接受传感器的配合使用可以使机器人自动避障行走。远
红外火焰传感器可以检测光的强弱,用于判断房间是否有火以及趋光灭火。声音传感器用于启动。基于实践,风扇灭火更为可
靠,所以选用风扇灭火。
2 灭火机器人的总体设计
在智能灭火机器人系统中,首先要解决的是定位问题,故需要一个好的定位方案。所以,控制核心需要给传感器留足够的输入
接口,同时也要有足够的输出接口用于控制外设。而速度对灭火机器人至关重要,在高速运动的情况下,需要CPU具有比较
强的浮点数运算能力。基于上述考虑,选择ARM9为灭火机器人的控制核心,该控制器硬件功能齐全、功耗小、周边设备集成
度高,是先进的智能机器人计算平台。它与其他的主要部件如表1所示,系统总体框架如图2所示。
下载后可阅读完整内容,剩余3页未读,立即下载
2017-12-13 上传
2023-09-05 上传
2023-06-13 上传
2023-05-30 上传
2023-05-30 上传
2024-10-30 上传
2024-10-26 上传

weixin_38571759
- 粉丝: 6
- 资源: 897
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
