MEMS陀螺仪随机误差补偿技术与Kalman滤波应用
需积分: 12 157 浏览量
更新于2024-08-12
收藏 907KB PDF 举报
"该资源是一篇关于MEMS(微电子机械系统)陀螺仪随机误差补偿方法的研究论文,发表于2009年。论文主要针对MEMS陀螺仪的随机漂移误差,提出并比较了两种基于Kalman滤波理论的补偿方法。通过建立陀螺仪随机误差模型,详细推导了滤波方程,并通过实验验证了这两种方法的有效性,特别是后一种方法在滤波和跟踪性能上的优势。"
文章中涉及的知识点包括:
1. **MEMS陀螺仪**:MEMS陀螺仪是一种微型传感器,用于测量物体的角速度,广泛应用于惯性导航、无人机控制、智能手机等设备中。由于制造工艺和物理效应,它们可能存在随机漂移误差,影响测量精度。
2. **随机漂移误差**:这是MEMS陀螺仪常见的性能问题,表现为输出信号随着时间的推移出现非线性漂移,降低了传感器的长期稳定性。
3. **Kalman滤波理论**:一种用于估计动态系统状态的最优滤波算法,通过融合来自多个传感器的数据,可以有效地减少噪声和误差,提高数据准确性。
4. **等随机和等随机加速假设**:论文依据陀螺仪输出角速率信息的变化特点,提出了两种假设作为误差建模的基础,分别对应不同的滤波策略。
5. **误差模型**:建立陀螺仪随机误差模型是进行误差补偿的关键步骤,模型能描述误差随时间的变化规律。
6. **Kalman滤波方程**:在误差模型基础上,推导出适应MEMS陀螺仪随机误差的Kalman滤波方程,用于计算最优的误差补偿值。
7. **实验验证**:通过实际微惯性测量系统中的MEMS陀螺仪输出信号分析,验证了两种补偿方法的正确性和有效性,证明后一种方法在滤波和跟踪性能上更优。
8. **信号完整性和耦合噪声**:虽然这部分内容似乎与MEMS陀螺仪的主题不直接相关,但提到了信号完整性和耦合噪声的问题,这通常是在高速数字电路和微波系统设计中考虑的重要因素,与微带线和PCB参数密切相关。
9. **时域有限差分法(FDTD)**:一种计算电磁场的数值分析方法,适用于分析微带线、微带非连续性等复杂电磁问题,文中提及FDTD在研究微带线信号完整性和耦合噪声方面的作用。
10. **吸收边界条件**:在FDTD模拟中,通过使用完全匹配层(Perfectly Matched Layer, PML)来模拟理想的吸收边界,以减少反射并提高仿真精度。
11. **电路参数**:如微带线的长度、宽度、厚度、内部边缘距离,以及返回路径的长度、宽度、厚度和介质基板的参数,这些都影响微带线的电气特性。
这篇论文不仅探讨了MEMS陀螺仪的误差补偿技术,还涉及到信号完整性和电磁场分析的相关知识,展示了多学科交叉在解决实际工程问题中的应用。
成,实现微波部件和系统的集成化,因此被广泛地应用于微波电路,成为构造复杂微波电路的基础.由于微
带线之间耦合途径的多样性及周围介质的复杂性,所以数值分析方法成为分析其相关参数的最有效工具.
时域有限差分方法(
Finite
-
Difference T im e
-
Do main
,
FDT D
)
[1-3]
是一种分析复杂电磁场问题的有效
工具.
FDT D
方法的多功能性,使其能够用于分析微带线、微带非连续性、有源和无源器件及天线等
[4-12]
;
然而大多数文献只是用该方法分析微带线的散射参数,并未研究微带线返回路径的不连续性对不同
PCB
参数微带线的信号完整性及耦合噪声的影响以及不连续性变化时这种影响的变化.由于
FDT D
方法处理
复杂电路问题的灵活性以及宽带信号可以用做激励源的优点,本文基于
FDT D
方法,用高斯脉冲为激励
源,首先研究激励微带线激励端和负载端的信号完整性以及静态微带线近端和远端的耦合噪声在不同
PCB
参数下的变化情况,其次研究返回路径的非连续性对上述信号完整性及耦合噪声的影响,最后研究
非连续性变化时上述影响的变化.
吸收边界采用单轴各项异性介质的完全匹配层
[3,14-15]
,通过适当选取介质的参数,各项异性介质有较
好的吸收效果.
1 时域仿真
1.1 电路结构及参数
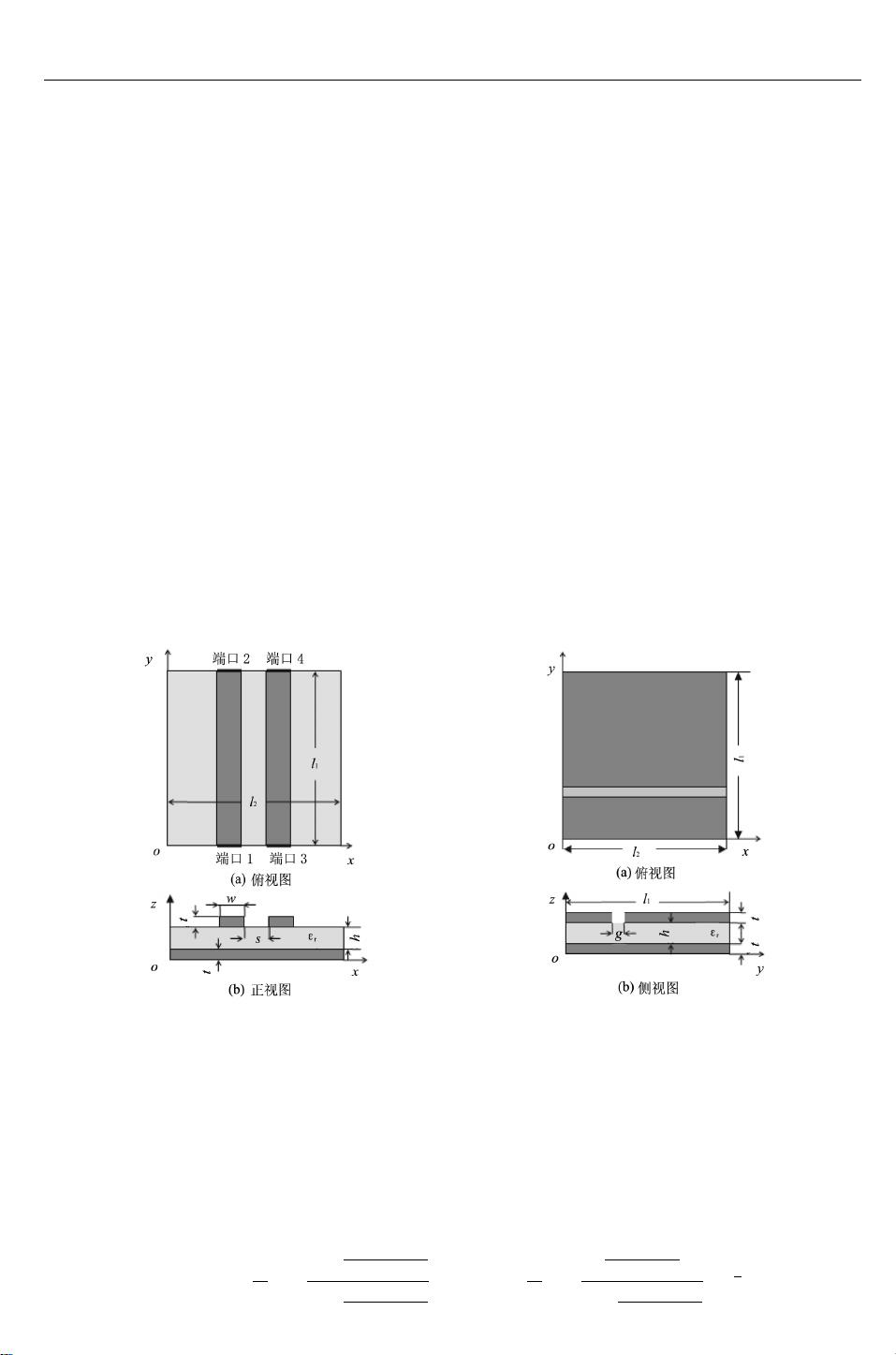
图 1 是所研究的微带线及
PCB
的俯视图及正视图,铜质微带线(
σ
=5.8
e
7
S
/
m
)的长度、宽度、厚度及
微带线内部边缘的距离分别用
l
1
,
w
,
t
和
s
表示,铜质返回路径和介质基板(相对介电常数为
ε
r
)的长度为
l
1
,宽为
l
2
,铜质返回路径厚度为
t
,介质基板厚度为
h
,微带线特征阻抗为
Z
0
.端口 1, 端口 2, 端口 3 和端口
4 为微带线的 4 个端口.
图 1 微 带 线 及
P C B
F ig
.1
M icr os t r ip s and P CB
图 2 微 带 线 返 回 路 径 非 连 续 性
F ig
.2
Dis continuit y o f r etu r n pat h o f m icro s t r ips
本文中,微带线返回路径非连续性采用在返回路径上产生在一个宽度为
g
, 中心距激励端50
m m
的缝
隙.图 2 是从
PCB
板背部看微带线返回路径非连续性的俯视图和侧视图.
1.2 有集中元件的
FDT D
公式
有关
FDT D
方法及完全匹配层的理论可以参阅前述文献,这里仅给出位于
E
z
节点,具有内阻
R
S
, 电
压源
V
S
的
FDT D
公式.
E
z
的表达式为
[3]
E
n
+ 1
z
(
i
,
j
,
k
+
1
2
) =
1 -
Δ
t
Δ
z
2
R s
ε
0
Δ
x
Δ
y
1 +
Δ
t
Δ
z
2
R s
ε
0
Δ
x
Δ
y
E
n
z
(
i
,
j
,
k
+
1
2
) +
Δ
t
R s
ε
0
Δ
x
Δ
y
1 +
Δ
t
Δ
z
2
R s
ε
0
Δ
x
Δ
y
V
n
+
1
2
S
+
773
(总第 126 期) 微带线返回路径非连续性对信号及噪声的影响(陈建华等)
下载后可阅读完整内容,剩余8页未读,立即下载
2021-09-26 上传
2021-01-20 上传
2021-01-12 上传
2021-09-19 上传
2019-08-17 上传
2021-05-17 上传
点击了解资源详情
点击了解资源详情

weixin_38546308
- 粉丝: 4
- 资源: 969
 我的内容管理
展开
我的内容管理
展开







最新资源
- node-silverpop:轻松访问Silverpop Engage API的Node.js实现
- 最小宽度网格图绘制算法研究
- 多数据源事务解决方案:统一管理单应用中的多数据库
- 利用Next.js匿名浏览Reddit子板块图片
- SpringBoot+H5官网模板,覆盖多种网页资源播放
- Gitshots-server:简化开源贡献的提交记录服务
- Scrapy-Dash工具:轻松生成Scrapy文档集
- Node.js v18.12.0发布,优化Linux PPC64LE服务器性能
- 蚂蚁设计专业版快速使用指南与环境配置
- Vue.js 2.3.4源码解读及开发环境配置指南
- LDBase:Lazarus开发者的dbf数据库管理开源工具
- 高效部署WordPress的VENISON脚本教程
- Saffron Bahraman-crx插件:控制产品线的栽培与培养
- Gitpod中运行前后端应用程序的指南
- Node.js v20.3.0新版本发布 - 开源跨平台JavaScript环境
- 掌握非线性方程根的迭代求解-Matlab方法实现
