Linux嵌入式:S3C2440看门狗驱动详解
88 浏览量
更新于2024-09-02
收藏 242KB PDF 举报
"本文介绍了Linux嵌入式系统中看门狗驱动的开发,主要关注S3C2440芯片上的看门狗功能及其工作原理。看门狗的主要作用是通过定时器实现系统的自动复位,当程序运行正常时,定时器会被定期重置,而程序异常时则可能导致系统复位。在S3C2440中,看门狗有三个关键寄存器:WTCON、WTDAT和WTCNT,用于控制、设置定时器和计数。驱动程序的编写涉及到对这些寄存器的操作,并确保在适当的时间执行‘喂狗’操作,即重置定时器计数,防止系统复位。"
在Linux嵌入式系统开发中,看门狗驱动是一个重要的组成部分,它确保系统的稳定性和可靠性。看门狗驱动的实现通常基于硬件平台的具体特性,例如在S3C2440处理器上,看门狗功能由特定的硬件模块提供,包括WTCON(定时器控制寄存器)、WTDAT(定时器数据寄存器)和WTCNT(定时器计数寄存器)。WTCON用于设置看门狗的工作模式和使能,WTDAT用于设定复位前允许的最大计数值,而WTCNT实际存储当前的计数值。
在软件层面,驱动程序需要处理以下关键任务:
1. 初始化:初始化看门狗驱动,包括设置初始的定时器值和控制寄存器的配置。这通常在系统启动时完成,可以通过读写相应的内存映射区域来操作寄存器。
2. 定时“喂狗”:在程序正常运行期间,需要周期性地更新WTCNT寄存器,防止其计数值归零并触发系统复位。这通常通过在中断服务程序或后台任务中实现。
3. 用户接口:提供一个API供其他用户空间应用程序调用,以控制看门狗的行为,如设置定时器周期、启动或停止看门狗等。
4. 错误处理:当系统发生异常时,看门狗驱动应能够妥善处理,如在无法正常“喂狗”时发出警告或记录日志。
在驱动代码中,常量和变量的定义如`nowayout`和`CONFIG_S3C2410_WATCHDOG_ATBOOT`是配置选项,它们可能与内核的编译选项相关。`nowayout`变量表示如果看门狗启动后,即使没有用户交互,看门狗是否仍然保持启用状态。`CONFIG_S3C2410_WATCHDOG_ATBOOT`则可能决定了看门狗是否在系统启动时自动激活。
看门狗驱动程序是嵌入式系统中不可或缺的部分,它通过监控程序运行状态,为系统提供了一种自我保护机制,能够在程序错误或异常情况下恢复系统的正常运行。在开发过程中,理解硬件原理和正确地操作相关寄存器是确保驱动有效性的关键。同时,良好的软件设计和错误处理策略可以提高系统的整体稳定性和安全性。
linux嵌入式系统开发之看门狗嵌入式系统开发之看门狗---驱动篇驱动篇
linux嵌入式系统开发之看门狗---驱动篇,从结构图和数据手册得知,看门狗Watchdog主要是实现系统自动复位的
功能,它是利用芯片内部的定时器,定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零(俗
称“喂狗”),当程序在正常工作时,定时器总是不能溢出,也就不能产生复位信号;一旦程序出现错误,可能就
无法在定时周期内复位看门狗,那么定时器就会溢出而产生复位信号使系统复位。
首先,咱们先看看有关S3C2440上看门狗的硬件电路:
从结构图和数据手册得知,看门狗Watchdog主要是实现系统自动复位的功能,它是利用芯片内部的定时器,定时输出连接到
电路的复位端,程序在一定时间范围内对定时器清零(俗称“喂狗”),当程序在正常工作时,定时器总是不能溢出,也就不能产
生复位信号;一旦程序出现错误,可能就无法在定时周期内复位看门狗,那么定时器就会溢出而产生复位信号使系统复位。
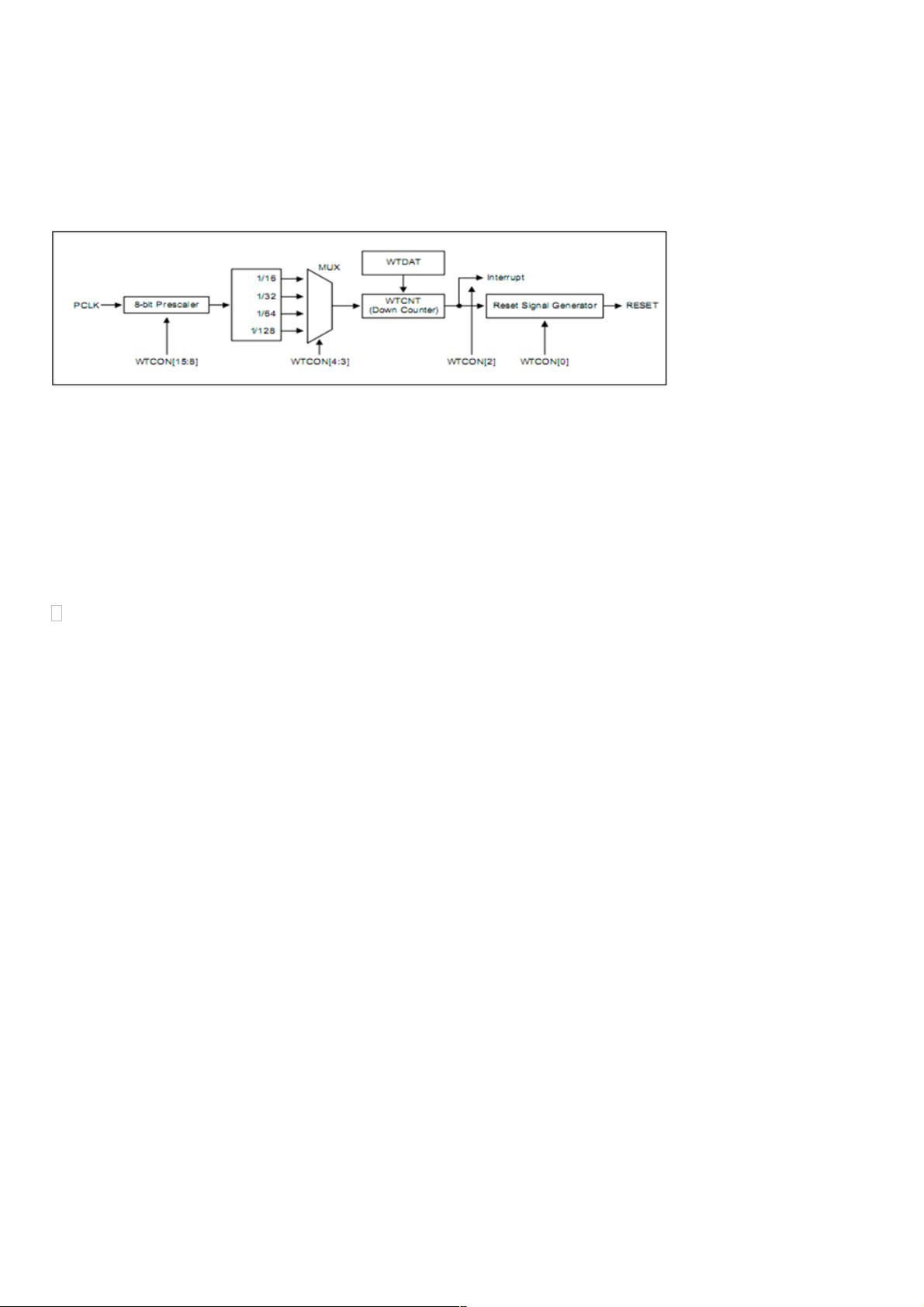
S3C2440的Watchdog模块提供了三个寄存器来对Watchdog进行操作,他们分别是:定时器控制寄存器WTCON、定时器数据
寄存器WTDAT和定时器计数寄存器WTCNT。注意:在对定时器数据寄存器WTDAT进行操作时必须在定时器控制寄存器
WTCON使能之前写入一个计数目标值,当Watchdog使能开启后,WTDAT中的值会自动被加载到计数寄存器WTCNT中,然
后Watchdog从CPU内部的时钟分频和时钟除数因子得到一个工作周期,当每个周期结束时计数寄存器WTCNT中的值会1,直
到递减为0时,如果还不重新往WTCNT中写入新的计数目标值(即“喂狗”),则 Watchdog就产生复位信号使系统复位。
了解了大致的硬件原理后,咱们就开始结合驱动程序源代码,来讲解有关看门狗驱动程序的写法。
必要的头文件
#define S3C_VA_WATCHDOG (0)
#define PFX "s3c2410-wdt:"
#define CONFIG_S3C2410_WATCHDOG_ATBOOT (0)
#define CONFIG_S3C2410_WATCHDOG_DEFAULT_TIME (15)
static int nowayout = WATCHDOG_NOWAYOUT;
//nowayout与CONFIG_WATCHDOG_NOWAYOUT配置相关,其一旦配置应用层调用close函数将不能关闭看门狗
static int tmr_margin = CONFIG_S3C2410_WATCHDOG_DEFAULT_TIME;//默认的喂狗时间
static int tmr_atboot = CONFIG_S3C2410_WATCHDOG_ATBOOT;
//关于tmr_atboot,要想系统一上电自动使能看门狗,就为1。最好使用0,由于我们想通过open函数来打开看门狗
static int soft_noboot;
//soft_noboot为1时看门狗将作为一般的中断定时器使用,为0时作为可复位电路的看门狗,默认为0
static int debug; ////调式模式
/*驱动程序模块参数,如果在加载驱动模块时没有设定这些参数,则这些参数将采用默认值,
这些参数在接下来的步骤中将被一一用到,参数具体作用也将在各步骤中来说明*/
module_param(tmr_margin, int, 0);
module_param(tmr_atboot, int, 0);
module_param(nowayout, int, 0);
module_param(soft_noboot, int, 0);
module_param(debug, int, 0);
//下面的这些没什么大的作用,就是为了做参数描述
MODULE_PARM_DESC(tmr_margin, "Watchdog tmr_margin in seconds. default="
__MODULE_STRING(CONFIG_S3C2410_WATCHDOG_DEFAULT_TIME) ")");
MODULE_PARM_DESC(tmr_atboot, "Watchdog is started at boot time if set to 1, default="
__MODULE_STRING(CONFIG_S3C2410_WATCHDOG_ATBOOT));
MODULE_PARM_DESC(nowayout, "Watchdog cannot be stopped once started (default="
__MODULE_STRING(WATCHDOG_NOWAYOUT) ")");
MODULE_PARM_DESC(soft_noboot, "Watchdog action, set to 1 to ignore reboots, "
"0 to reboot (default depends on ONLY_TESTING)");
MODULE_PARM_DESC(debug, "Watchdog debug, set to >1 for debug, (default 0)");
static unsigned long open_lock;
static struct device *wdt_dev; /* platform device attached to */
//用来保存watchdog的IO端口占用的IO空间和经过虚拟映射后的内存地址
static struct resource *wdt_mem;
static void __iomem *wdt_base;
static struct resource *wdt_irq;
//保存从平台时钟队列中获取watchdog的时钟
static struct clk *wdt_clock;
//用于保存经计算后得到的计数寄存器WTCNT的计数值
static unsigned int wdt_count;
static char expect_close;
下载后可阅读完整内容,剩余6页未读,立即下载
2011-07-23 上传
2022-08-08 上传
点击了解资源详情
900 浏览量
2010-09-03 上传
2020-11-10 上传
2020-03-29 上传
2020-08-28 上传
2011-04-26 上传

weixin_38659789
- 粉丝: 4
- 资源: 923
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
