Docker存储驱动详解:六种驱动对比与选型策略
需积分: 50 65 浏览量
更新于2024-07-18
收藏 681KB DOCX 举报
Docker存储驱动是Docker引擎内部管理容器数据存储的关键组件,它决定了数据在宿主机上的组织和持久化方式。本文将介绍六个常见的Docker存储驱动:aufs、btrfs、devicemapper、overlayfs、zfs和vfs,并分析它们各自的特性和适用场景。
1. aufs (Advanced Filesystem Union):这是早期Docker版本的默认存储驱动,特别适合于Ubuntu和旧版Debian系统。aufs基于文件系统级别操作,内存效率较高,但可写层在频繁写入时可能增长较大。然而,对于内核版本高于4.0的系统,overlay2被推荐替换aufs,因为其性能更为优越。
2. btrfs:这是一种现代的文件系统,支持快照、错误恢复和空间节省等特性。btrfs在写入密集型操作中表现出色,尤其是对深层文件系统或大量层级的容器,尽管它对内存需求较高。
3. devicemapper:提供了loop-lvm和direct-lvm两种模式。direct-lvm模式性能较好,但需要额外配置;而loop-lvm模式零配置但性能较差。overlayfs优于devicemapper的loop-lvm模式。
4. overlayfs:overlay和overlay2是Docker推荐的存储驱动,它们都支持轻量级的、基于层的存储,无需额外配置。overlay2是overlay的改进版本,提供了更好的性能和安全性。当没有特殊限制时,overlay2应作为首选。
5. zfs:适用于需要高性能和密集工作的场景,例如PaaS(平台即服务)。ZFS的特性使其在某些方面优于其他驱动,但对Linux操作系统的依赖和对内存的需求限制了其在生产环境中的应用。
6. vfs (Virtual File System):尽管官方并不推荐使用vfs作为Docker存储驱动,但在某些情况下,如与旧系统兼容或者测试环境中,可能会考虑使用它。
在选择存储驱动时,应考虑以下因素:
- 系统内核支持:确保选择的驱动与内核兼容。
- 性能和稳定性:优先选择overlay2,其次是overlay,然后是devicemapper的direct-lvm。
- 文件系统需求:根据应用程序的需求选择合适的文件系统,如写入密集型工作可能需要btrfs或zfs。
- 内存和磁盘资源:btrfs和zfs对内存要求较高,需要权衡资源分配。
- 生产环境限制:对于生产环境,应避免使用可能不稳定或复杂配置的存储驱动,如zfs。
理解并评估这些存储驱动的优缺点对于优化Docker部署至关重要,选择合适的驱动可以提升容器性能、存储效率和系统的整体稳定性。
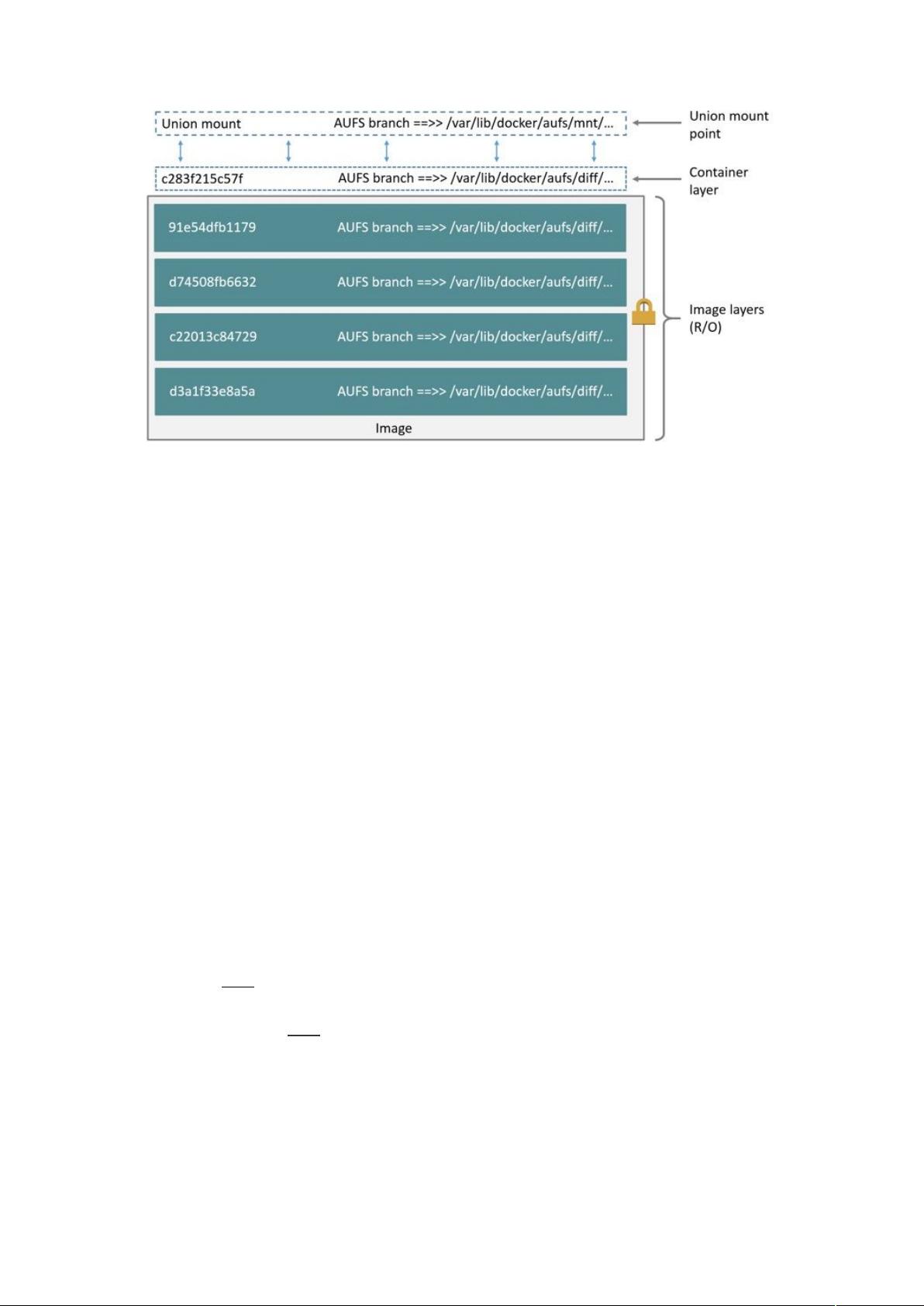
aufs 使用写时复制策略来最大化效率和最小化开销
读
文件不在容器层:如果容器打开一个用于读取访问的文件,并且该文件在容器层中不
存在,那么存储驱动程序就会在镜像层中搜索该文件,从容器层下面的层开始。从找
到它的层读取。
文件只存在容器层:如果一个容器打开一个用于读取访问的文件,并且该文件存在于
容器层中,则从那里读取它。
文件既存在于容器层又存在于镜像层:如果一个容器打开一个用于读取访问的文件,
并且该文件存在于容器层和一个或多个镜像层中,则从容器层读取该文件。容器层中
的文件在镜像层中使用相同的名称隐藏文件。
写
第一次写一个文件:第一次将容器写入现有文件时,该文件不存在于容器中。 aufs 驱动程
序执行一个 copy 操作,将文件从它存在的镜像层复制到可写的容器层。然后容器将更改写
入容器层中文件的新副本。
aufs 在文件级别而不是块级别工作。这意味着所有的 copy 操作都复制整个文件,即使
文件非常大,而且只有一小部分正在被修改。这对容器的写性能有明显的影响。 aufs 在搜
索带有多个图层的镜像文件时,会有明显的延迟。但是,值得注意的是,copy 操作只在第
一次写入给定文件时发生。随后对同一文件的写入操作与已复制到容器的文件副本操作。
删除文件或者目录:
当一个文件在一个容器中被删除时,在容器层中创建一个 whiteout 文件。镜像层中的
文件版本没有被删除(因为镜像层是只读的)。但是,它对容器不可用。
当在容器中删除目录时,在容器层中创建一个不透明的文件。作用和 whiteout 文件相
似可以有效地阻止了目录被访问,即使它仍然存在于镜像层中。
性能:
与 overlay2 驱动相比,aufs 存储驱动程序的性能更低,但是对于 PaaS 和其他类似的
用例来说,它是一个很好的选择,因为容器密度很重要。这是因为 aufs 有效地在多个
运行容器之间共享映像,从而支持快速容器启动时间和最小使用磁盘空间。
aufs 在镜像层和容器之间共享文件的底层机制非常有效地使用页面缓存。
剩余14页未读,继续阅读
2024-06-17 上传
2022-06-06 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-08-18 上传

bob62856
- 粉丝: 730
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
