视觉惯性导航:无需初始化的高动态运动建环境定位
需积分: 10 64 浏览量
更新于2024-07-16
收藏 1.18MB PDF 举报
本文探讨了一种创新的视觉惯性辅助导航方法(Visual-Inertial-Aided Navigation, VIO),旨在解决在复杂室内环境中高动态运动时的初始条件问题。传统的惯性测量单元(Inertial Measurement Unit, IMU)和视觉传感器融合往往依赖于特殊的初始化步骤,这可能导致定位精度和稳定性受限。作者提出了一种图形化的同时定位与地图构建(Simultaneous Localization and Mapping, SLAM)技术,它能够实时且线性地恢复初始条件,包括重力估计,从而避免了复杂的初始化过程。
该算法的核心在于其高效的时间一致性输出特性,使得系统能够在实时处理中提供位置、速度、姿态以及引力向量的精确估计。此外,系统还具备实时估计尺度的能力,这对于确保导航系统的准确性至关重要。论文着重展示了在实际建筑环境中,无论是使用双目视觉(Stereo Vision)还是单目视觉(Monocular Vision),如何将IMU数据与视觉数据实时融合,以实现对高动态运动的人类或机器人活动的精确跟踪和定位。
作者深入讨论了工作的技术细节,如可观性和实时性能评估,这些都是确保VIO系统稳定运行的关键因素。实验结果表明,该方法在复杂室内环境中表现出色,能有效地进行在线平台位置、速度和姿态估计,同时对传感器校准和对齐也有显著效果。这一研究成果对于提升移动机器人和自主导航系统在动态环境中的导航能力具有重要意义,为未来人机交互提供了可靠的基础。本文是一项重要的技术突破,为解决高动态运动环境下的导航问题开辟了新的途径。
64 IEEE TRANSACTIONS ON ROBOTICS, VOL. 28, NO. 1, FEBRUARY 2012
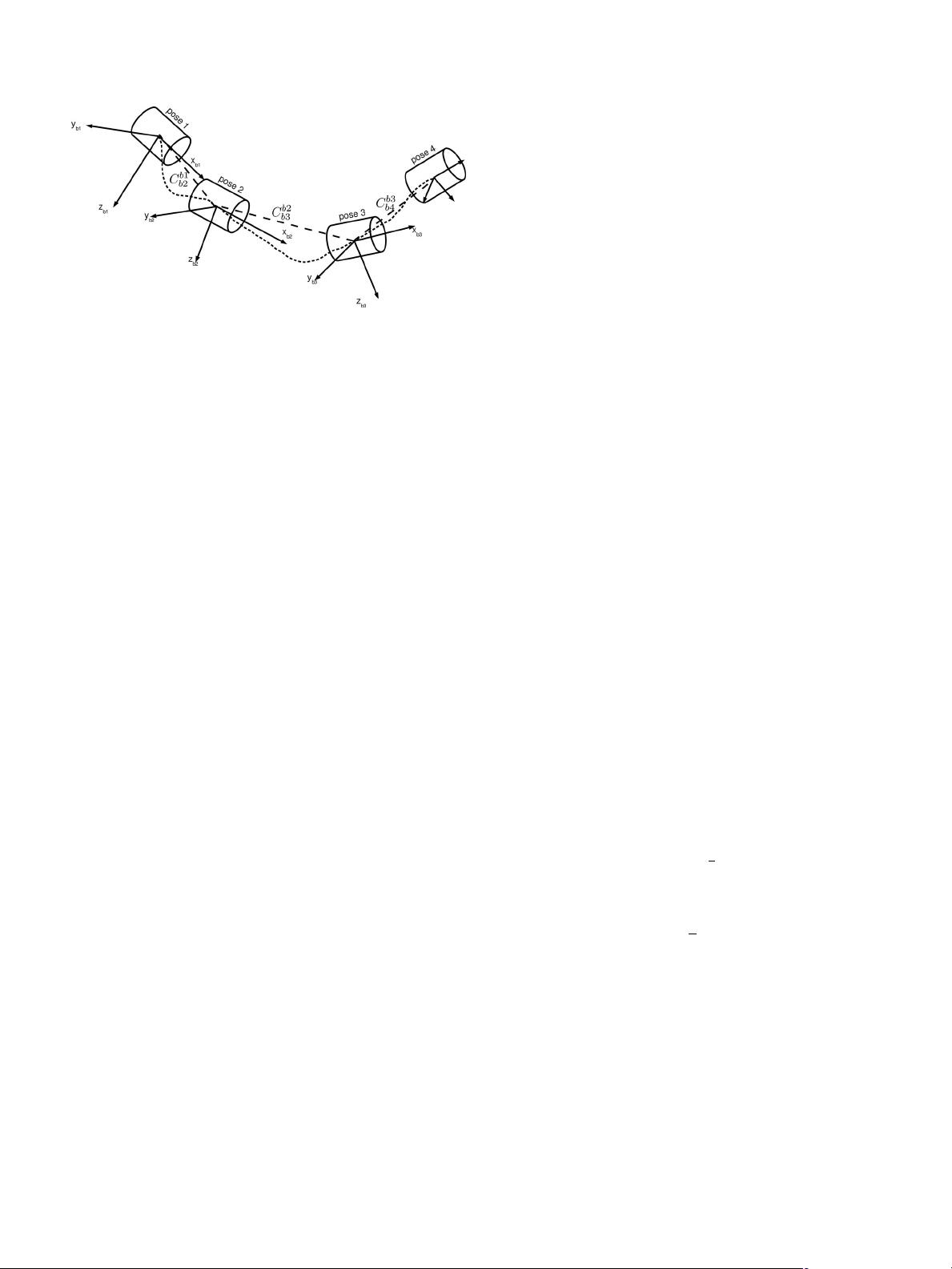
Fig. 2. Inertial integration in the body frame of the last pose of interest.
frame before integration. IMUs are sampled at very high rates
when compared with other sensors that are used in navigation,
on the order of hundreds of samples per second, even in low-cost
units.
This requires updates to be performed at high rates for a
marginalizing filter, such as the EKF, or a large number of pose
states being required for delayed state methods. Another prob-
lem this causes, specifically for batch initialized inertial meth-
ods, is that it requires a large number of inertial observations
that are to be stored and processed in the batch filter once the
initial conditions become observable.
If these observations could be integratedfirst without knowing
the initial conditions of the vehicle, then a number of inertial
observations could be treated as a single observation in the filter,
reducing the problems that are listed previously.
One possible way to do this is to integrate the inertial observa-
tions between required poses in the body frame of the previous
pose, as presented in [16]. An illustration of this concept is
shown in Fig. 2, where the frame that is used for integration
of the inertial observations moves along with the vehicle from
pose to pose.
Since in many navigation applications, poses are only re-
quired at the rate of the next fastest sensor other than the IMU,
for example, the frame rate of the camera, and this sensor usually
takes samples at a much lower rate, many inertial observations
can be integrated between poses this way.
If the inertial integration equations (1)–(3) are rewritten to
perform the integration in the body frame of the last pose, the
following equations are obtained:
p
n
t2
= p
n
t1
+(t2 − t1)v
n
t1
+
t2
t1
g
n
dt
2
+ C
n
bt1
t2
t1
C
bt1
bt
f
b
t
− bias
obs
f
dt
2
(4)
v
n
t2
= v
n
t1
+
t2
t1
g
n
dt + C
n
bt1
t2
t1
C
bt1
bt
f
b
t
− bias
obs
f
dt
(5)
φ
n
t2
= φ
n
t1
+ E
n
bt1
t2
t1
E
bt1
bt
ω
b
t
− bias
obs
ω
dt. (6)
The initial conditions for the rotation matrix C
bt1
bt
at the start
of the integration period time t1 is C
bt1
bt1
, which is the Identity
matrix.
These equations still provide the vehicle pose estimates in the
globally referenced navigation frame, but the integration of the
inertial observations between poses is performed in the body
frame of the last pose and then transformed into the navigation
frame after integration instead of before.
One thing to note from (4)–(6) is that the integrations are
performed in the vehicle body frame; the vehicle states with
respect to this frame can be perfectly known. As a result, the
inertial observations can actually be integrated with no initial
condition requirements, and even before the states themselves
are estimated.
If the integrals of the inertial observations from (4)–(6) are
extracted, the following equations are obtained:
Δp
+t1
t2
=
t2
t1
C
bt1
bt
f
b
t
− bias
obs
f
dt
2
(7)
Δv
t1
t2
=
t2
t1
C
bt1
bt
f
b
t
− bias
obs
f
dt (8)
Δφ
t1
t2
=
t2
t1
E
bt1
bt
ω
b
t
− bias
obs
ω
dt. (9)
These terms that can be preintegrated without initial condi-
tions represent the change in position, velocity, and attitude of
the vehicle from pose 1 to pose 2 in the (moving) body frame
of pose 1.
These preintegrated sets of observations can then be used
as a single delta state observation in place of all the IMU ob-
servations that occur between these two poses. Therefore these
integrated terms will be referred to as preintegrated inertial delta
observations.
Once calculated these delta components can then be substi-
tuted back into (4)–(6) as in (10)–(12), shown below. In these
equations the integration of the gravity term has also been sim-
plified, which can be done as the gravity vector integrand con-
tains no time-dependent terms (the
1
2
factor in (10) is a byproduct
of the double integration process)
p
n
t2
= p
n
t1
+(t2 − t1)v
n
t1
+
1
2
(t2 − t1)
2
g
n
+ C
n
bt1
Δp
+t1
t2
(10)
v
n
t2
= v
n
t1
+(t2 − t1)g
n
+ C
n
bt1
Δv
t1
t2
(11)
φ
n
t2
= EulerFromDCM
C
n
bt1
ΔC
bt1
bt2
. (12)
The delta attitude component ΔC
bt1
bt2
is multiplied by the
previous attitude rotation matrix and then converted back into
the Euler representation that is used for state estimation. This
is done to avoid the small-angle approximation that is used by
the Euler rotation rate matrix as this may no longer be valid
for the longer integration integrals used. Furthermore, the delta
attitude component refers to an actual change in attitude over
剩余15页未读,继续阅读
2024-07-12 上传
2019-03-05 上传
2024-07-13 上传
2021-03-14 上传
2018-02-06 上传
2020-04-06 上传
2019-03-08 上传
2021-09-14 上传
2020-11-03 上传

山喵
- 粉丝: 14
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
